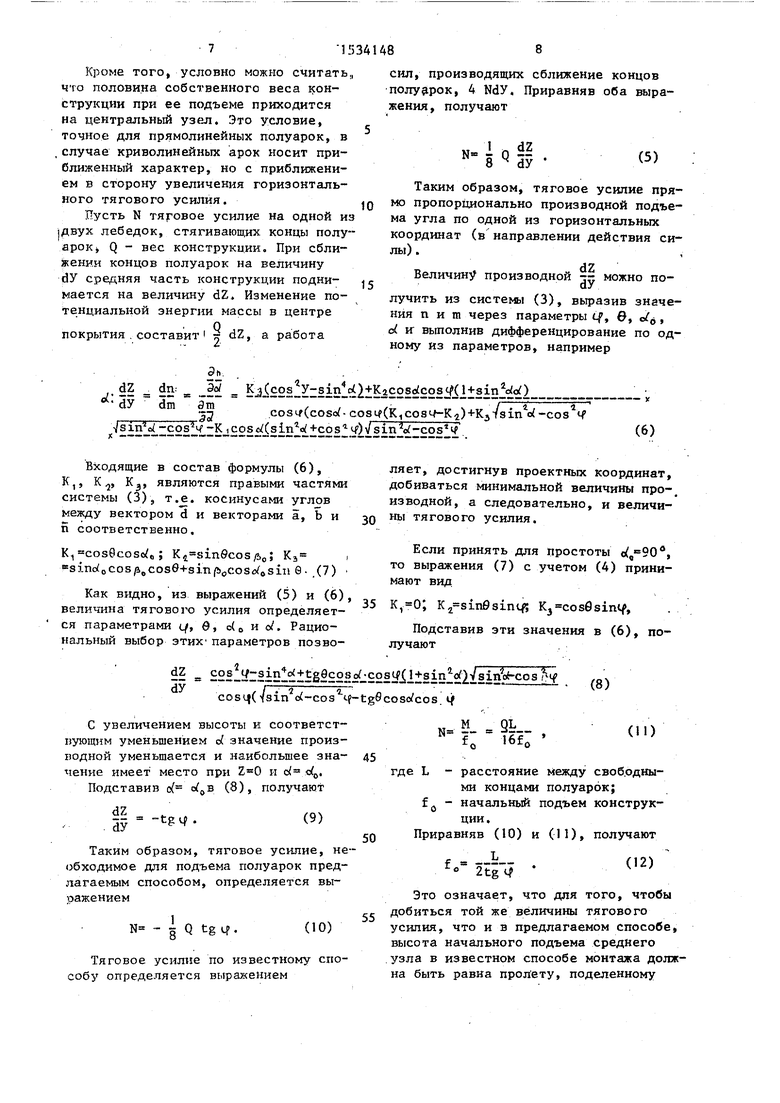
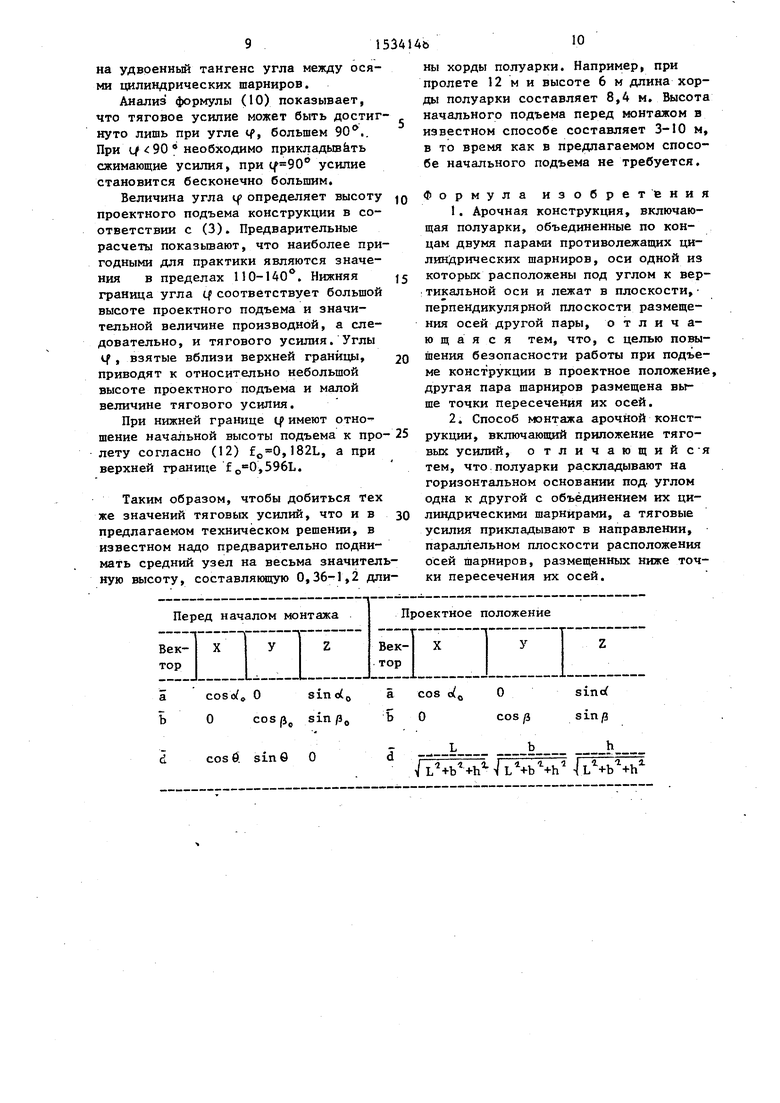
Изобретение относится к строительству, в частности к конструкции и технологии монтажа быстровозводимых ppivmirx систем различного назначения. Целью изобретения является повышение безопасности работы при подъеме конструкции и проектное положение. На фиг. 1 изображено положение полуарок до начала монтажа; на фиг.2- арочная конструкция в проектном положении; на Лиг, 3 - центральная часть конструкции до начала монтажа; на фиг. 4 - центральная часть конст- гУкции в проектном положении; на фиг. 5 и 6 - схемы взаимного расположения осей шарниров до начала монтажа и в проектном положении соответственно; на фиг. 7 - геометрическая схема взаимного расположения полуарок по отношению к координатным плоскостям.
Четыре полуарки 1 предварительно соединены в центральный замок при помощи двух пар цилиндрических шарниров 2 и 3. Каждая полуарка 1 прикреплена к двум смежным шарнирам 2 и 3 так, что противоположные оси 4 и 5 шарниров пересекаются в точках 6 и 7 соответственно и попарно расположены в двух вертикальных взаимно перпендикулярных плоскостях 8 и 9 соответственно. Точки пересечения 6 и 7 противоположных осей 4 и 5 располагаются на линии 10 пересечения верти- качьных плоскостей 8 и 9.
В одной плоскости 8 шарниры 2 раз- г- цены выше точки 6 пересечения их осей 4. В другой плоскости 9 шарниры размещены ниже точки 7 пересечения t ( ей 5. Тяговое усилие прикладывают |, направлении I , параллельном штос |.сти 9, где размещены оси 5 шарни3, расположенных ниже точки 7 пе чгигы их осей 5.
1монгаж арочной конструкции выпол- iлетел следующим образом.
На площадку доставляются полуарки 1, Возможна их укрупнительная сборка нл стройплощадке из секций. Далее И .ауарки 1 объединяются в центральный замок посредством двух пар цилиндрических шарниров 2 и 3. Благодаря указанпоггу расположению осей, расположенных вдоль сторон пространственно о четырехугольника, приложение стягива1г1ц ,и: усилий к свободным концам полуарок 1 в направлении 11 вы- iHijpeT цептрапьной части лроч
0
5
0
5
0
5
0
5
ной конструкции. Тяговое усилие прикладывается в направлении, параллельном плоскости расположения осей шарниров, к свободным концам полуарок 1 при помощи двух лебедок 12, стягивающих концы 13 тросом 14. Вместо лебедок могут применяться тали, полиспасты и т.п. Свободные концы 13 полуарок 1 могут перемещаться по направляющим с применением катков, уменьшающих трение.
В проектном положении конструкции крепятся свободными концами 13 к заранее выполненным фундаментам известными средствами, например при помощи сварки к закладным деталям фундаментов. Кроме того, фиксация свободных концов полуарок (опорных частей арочной конструкции) может выполнят ься при помощи других анкерных конструкций и деталей, например костылей, штопоров, погружаемых в грунт. Возможно устройство монолитных фундаментов по месту установки опорных частей полуарок.
Дополнительная фиксация конструкции может быть достигнута при помощи фланцев, укрепленных на концах полуарок в центральном узле. Плоскости фланцев в проектном положении совпадают с вертикальными плоскостями 8 и 9.
В проектном положении, будучи закрепленной к основанию, конструкция воспринимает распор, работая на восприятие эксплуатационных нагрузок по схеме перекрестной арочной системы. На восприятие собственного веса в процессе монтажа конструкция работает по балочной схеме.
Сопоставление эффективности предлагаемого способа с известным способом подъема арочной конструкции показывает, что рациональньй выбор угла между осями смежных цилиндрических шарниров позволяет избежать предварительного подъема среднего узла на значительную высоту, составляющую 0,36- 1,2 длины хорды.
Определение геометрических параметров подъема арочной конструкции.
В связи с симметрией конструкции рассматривают одну ее четверть, ограниченную двумя полуплоскостями А и В, в которых расположены оси 4 и 5 цилиндрических шарниров 2 и 3.
На фиг. 7 показана проектная геометрия каркаса из перекрестных арок.
Пусть пролет арок L, ширина Ь, высота h. Соединяют одну из опор D с центральным замком Е прямой DE и строям единичный вектор d, расположенный вдоль прямой DE (хорды полуарки). Вводят единичные векторы а и Ь,,направленные вдоль осей 4 и 5 цилиндрических шарниров 2 и 3.
Координаты векторов а, Ь и d сводят в таблицу.
При составлении данной таблицы учитывалось, что перед началом монтажа вектор d (хорда полуарки) лежит в горизонтальной плоскости, составляя с осью X угол в. Векторы а и Ь вслед- стяие симметрии образуемого механизма в процессе трансформации расположены в плоскостях XOZ и YOZ соответственно. Тяговое усилие от лебедки, приложенное г свободному концу полуарки, направлено по оси У.
Вводят вектор п, перпендикулярный векторам а и Ь, используя их векторное произведение:

| название | год | авторы | номер документа |
|---|---|---|---|
| Быстровозводимая конструкция покрытия | 1988 |
|
SU1686085A1 |
| Ключевой шарнир в арке | 1987 |
|
SU1511349A1 |
| Арочное покрытие | 1985 |
|
SU1294944A1 |
| УСТРОЙСТВО ДЛЯ ВОЗВЕДЕНИЯ СВОДЧАТЫХ СООРУЖЕНИЙ | 2003 |
|
RU2243339C1 |
| Устройство для возведения сводов, арочных крепей и т.п. | 1949 |
|
SU94963A1 |
| СПОСОБ МОНТАЖА СВОДА АРКИ | 2013 |
|
RU2541010C1 |
| Способ монтажа пространственного блока покрытия | 2019 |
|
RU2734967C1 |
| АРОЧНЫЙ МОСТ С ЕЗДОЙ ПОВЕРХУ И СПОСОБ ЕГО ВОЗВЕДЕНИЯ | 2000 |
|
RU2171330C1 |
| Способ монтажа трехшарнирных арок | 1983 |
|
SU1193257A1 |
| Способ монтажа арочного моста с ездой поверху | 1976 |
|
SU639989A1 |
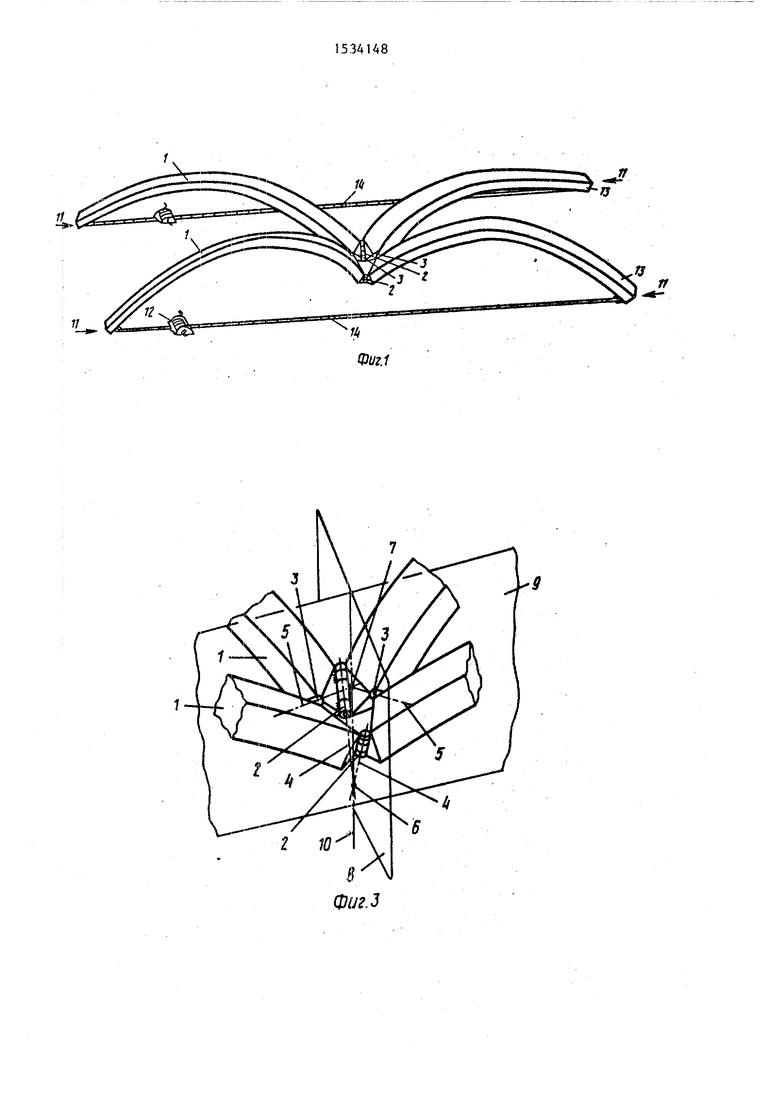


Изобретение относится к области строительства, в частности к конструкции и технологии монтажа быстровозводимых арочных систем различного назначения. Целью изобретения является повышение безопасности работы при подъеме конструкции в проектное положение. Арочная конструкция состоит из четырех полуарок, предварительно соединенных в замок при помощи двух пар цилиндрических шарниров 2 и 3. Каждая полуарка прикреплена к двум смежным шарнирам 2 и 3 таким образом, что противоположные оси 4 и 5 шарниров пересекаются и точки их пересечения располагаются по линии 10. В одной плоскости шарниры 2 расположены выше точки пересечения их осей, а в другой-перпендикулярно первой плоскости, шарниры 3 расположены ниже точки 7 пересечения их осей. Монтаж арочной конструкции выполняется путем приложения тяговых усилий в направлении, параллельном плоскости расположения осей шарниров. Перед приложением усилий полуарки раскладывают на горизонтальном основании под углом одна к другой с объединением их цилиндрическими шарнирами. 2 с.п. ф-лы, 7 ил.
х У г
О cosp si.np cose/,, 0 sinof
sirWcos/з; sin/}cosc ;-cos cos/j}; (1)
n0eb0xa0 {sino(0cos/30; sin/30-cosc 0 ; -coso/0- cos .
Поскольку оси цилиндрических шарниров жестко прикреплены к стержням, взаимные углы между векторами а, п, а и Ь постоянны в любой момент трансформации, поэтому скалярные произведения соответствующих векторов неизменны
ad-iodo-K,; nd n0dc-K3.
(2)
Подставив в (2) из таблицы и(1) координаты векторов а а0, ЬЬ0, dd0, n0n и скалярно их перемножив, получают величины углов наклона осей шарниров к горизонтальной плоскости:
1 coso(+n б cos го cos ft +sin/a sin6 со8/з„;(3)
1 sinc(cos/}+m sin/icosc/-n cosofcos/э1 /30cos0+sin/3 coso 0sine,
Lb
где ; m 7 ;
/LW7h /L +bSh
координаты едиiL яичного вектора. Вследствие постоянства угла между осями шарниров, представленными векторами а и Ь, можно записать
,(A)
откуда
sine/. (0sin/30 cosi,
где ср - угол между векторами а и Ь, равный углу между осями цилиндрических шарниров. Система линейных уравнений (3)
устанавливает связь между параметрами if, 6, а, о/о и координатами арочного каркаса 1, т, п.
Задавшись величинами if- угла между осями шарниров, в - исходного угла между хордой полуарки и осью X, - начального угла между осью дан5 ного шарнира и осью X, о(- текущего угла наклона оси шарнира к оси X, подставляют их в систему (3), решив которую, получают координаты, харак- теризукчцие положение конструкции из
Q перекрестных арок.
Существует свобода выбора параметров if, Q, с/о и а( для достижения требуемой геометрии арочного каркаса. Исследуют, какими критериями следует руководствоваться для использования тех или иных значений перечисленных параметров, изменение которых повлияет на величину тягового усилия на лебедке или полиспаста для подъема
Q распорной системы из горизонтального положения в проектное. Оценивают величину этого усилия.
Силами трения, а также деформациями элементов можно пренебречь.так
5 как оценка сил трения трудностей не представляет, а деформации элементов считают весьма малыми по сравнению с перемещением из исходного положения в проектное.
0
Изменение потенциальной энергии
массы в центре покрытия составляет PdZ, а работа сил N, производящих сближение концов полуарок, 2 NdX, е где Р - величина вертикальной нагрузки, приходящейся на центральный узел конструкции. Приравняв оба выражения,
получают N Р -- . . ал.
Кроме того, условно можно считать, что половина собственного веса конструкции при ее подъеме приходится на центральный узел. Это условие, точное для прямолинейных полуарок, в .случае криволинейных арок носит приближенный характер, но с приближением в сторону увеличения горизонтального тягового усилия.
Пусть N тяговое усилие на одной из |двух лебедок, стягивающих концы полуарок, Q - вес конструкции. При сближении концов полуарок на величину dY средняя часть конструкции поднимается на величину dZ. Изменение потенциальной энергии массы в центре
покрытия составит1 г dZ, а работа
л:
. И s dn я Эо Kj cos y sinj :tKicos cos4ilisinj)
dy dl (cosorcos K,cosiMC7)+K3-/9i.n o -cosV
-/sin oi -cosV -K oso sinV+cos /sin V-cos1
Входящие в состав формулы (6), К,, Кv K3, являются правыми частями системы (3), т.е. косинусами углов между вектором d и векторами а, Ъ и п соответственно,
K cosGcosc, ; .n0cos/50;
«sino(0cos/iecose+sinp0cos siii Q- .(7)
Как видно, из выражений (5) и (6), величина тягового усилия определяется параметрами ц, в, о(0 и о/. Рациональный выбор этих параметров позвоИ Ј°llifZEi2l l S®Ј°SЈL:ЈSS fiIi5i3 1 iI ЈЈi cosn(isin o(-cos if-tg6coso/cos if
С увеличением высоты и соответствующим уменьшением d. значение производной уменьшается и наибольшее значение имеет место при и с с.
Подставив aiОв (8), получают
g--tg
(9)
Таким образом, тяговое усилие, необходимое для подъема полуарок предлагаемым способом, определяется выражением
N- - g Q tg if.
(10)
Тяговое усилие по известному способу определяется выражением
сил, производящих сближение концов полуарок, 4 NdY. Приравняв оба выражения, получают
i g(5)
Таким образом, тяговое усилие пря- мо пропорционально производной подъема угла по одной из горизонтальных координат (в направлении действия силы) .
dZ
Величину производной -- можно по- аУ
лучить из системы (3), выразив значения пит через параметры tf, ©, /0, d и выполнив дифференцирование по одному из параметров, например
(6)
ляет, достигнув проектных координат, добиваться минимальной величины производной, а следовательно, и величины тягового усилия.
Если принять для простоты с(90л, то выражения (7) с учетом (4) принимают вид
К,0; K2 sinfisinqi; K3 cos6sin4,
Подставив эти значения в (6), получают
(8)
I6fft
(П)
где L - расстояние между свободными концами полуарок; f - начальный подъем конструкции. Приравняв (10) и (11), получают
Ј°ж
(12)
Это означает, что для того, чтобы добиться той же величины тягового усилия, что и в предлагаемом способе, высота начального подъема среднего узла в известном способе монтажа должна быть равна пролету, поделенному
на удвоенный тангенс угла между осями цилиндрических шарниров.
Анализ формулы (10) показывает, что тяговое усилие может быть достигнуто лишь при угле Ц, большем 90°.. При L/ 90° необходимо прикладывать сжимающие усилия, при усилие становится бесконечно большим.
Величина угла ц определяет высоту проектного подъема конструкции в соответствии с (3). Предварительные расчеты показывают, что наиболее пригодными для практики являются значения в пределах 110-140°. Нижняя граница угла ц соответствует большой высоте проектного подъема и значительной величине производной, а следовательно, и тягового усилия. Углы tf, взятые вблизи верхней границы, приводят к относительно небольшой высоте проектного подъема и малой величине тягового усилия.
При нижней границе tf имеют отношение начальной высоты подъема к про- лету согласно (12) ,182L, а при верхней границе ,596L.
Таким образом, чтобы добиться тех же значений тяговых усилий, что ив предлагаемом техническом решении, в известном надо предварительно поднимать средний узел на весьма значительную высоту, составляющую 0,36-1,2 дли0
5 0
5
0
ны хорды полуарки. Например, при пролете 12 м и высоте 6 м длина хорды полуарки составляет 8,4 м. Высота начального подъема перед монтажом в известном способе составляет 3-10 м, в то время как в предлагаемом способе начального подъема не требуется.
Формула изобретения 1. Арочная конструкция, включающая полуарки, объединенные по концам двумя парами противолежащих цилиндрических шарниров, оси одной из которых расположены под углом к вертикальной оси и лежат в плоскости, перпендикулярной плоскости размещения осей другой пары, отличающаяся тем, что, с целью повышения безопасности работы при подъеме конструкции в проектное положение, другая пара шарниров размещена выше точки пересечения их осей.
JiAbW W
и
и
Wfi 41
8Vl«7ЈSl
ti tntu
svivesi
0
| МАШИНА ДЛЯ ОТДЕЛЕНИЯ РЕЗИНЫ ОТ ОТХОДОВ ПРОРЕЗИНЕННОГО КОРДА | 1934 |
|
SU42687A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Складной элемент строительной конструкции | 1987 |
|
SU1470891A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
