11
Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока при упругой связи между электродвигателем и механизмом.
Цель изобретения - повьаиение качества регулирования электропривода.
На чертеже приведена схема предлагаемого электропривода.
Электропривод постоянного тока содержит электродвигатель 1 постоянного тока, подключенный к тиристор- ному силовому блоку 2 и связанный посредством упругой связи с механизмом последовательно соединенные первьм регулятор 3 частоты вращения, регулятор 4 тока и систему 5 формирования импульсов 5 выход которой подключен к входу тиристорного силового блока 2, датчик 6 тока, датчик 7 частоты вращения электродвигателя 1 ;и датчик 8 частоты вращения механизма, выходы которых посредством жестких и гибких обратных связей подключены к входам первого регулятора 3 частоты вращения и регулятора 4 тока, задатчик 9 частоты вращения, второй регулятор 10 частоты вращения, первый вход которого соединен с выходом задатчика 9 частоты вращения, а выход подключен к первому входу первого регулятора 3 частоты вращения, первый пропорционально-диффер енцирую щий блок 11 , включенный между вьгхо- дом датчика 6 тока и вторым входом регулятора 4 тока, сумматор 12, входы которого соединены .с выходами датчиков 7 и 8 частот вращения электродвигателя и механизма, а выход подключен к второму входу первого регулятора 3 частоты вращения, дифференцирующий блок 13 и второй пропорционально-дифференцирующий блок 14, входы которых соединень с выходом датчика 7 частоты вращения электродвигателя, а выходы подключены к третьим входам соответственно регулятора 4 тока и первого регулятора 3 частоты вращения, третий и четвертьм пропорционально-дифференцирующие блоки 15 и 16, выходы которых подключены соответственно к BTOpoNry и третьему входам второго регулятора 10 частота вращения, а входы соединены с входами датчиков 7 и 8 частоты вращения электродвигателя и механизма .
Электропривод работает следующим образом.
42
Сигнал с задатчика 9 частоты вращения поступает на один из входов второго регулятора 10 частоты вращения, на другие входы которого поступают сигналы отрицательных гибких и жестких обратных связей по скоростям электродвигателя 1 и механизма. Второй регулятор 10 частоты вращения, совместно с блоками указанных
обратных связей формирующий зависимость частоты вращения механизма от времени ЫгСс), выполнен в виде пропорционально- интегродифференцирующего блока. Сигнал с второго регулятора
10 частоты вращения поступает на первый вход первого регулятора 3 частоты вращения, на другие входы которо-- го поступают сигналы жесткой положительной обратной связи по разности
частот вращения электродвигателя и механизма, жесткой и гибкой отрицательной обратной связи по частоте вращения электродвигателя. Первый регулятор 3 частоты вращения, совместно с блоками указанных обратных связей формирующий зависимость частоты вращения электродвигателя от времени ) и компенсирующий
внутреннюю обратную связь по моменту упругости, вьтолнен в виде пропор- ционально-интегродифференцирующего блока с отсечкой по величине на его выходе. Сигнал с первого регулятора 3 частоты вращения поступает на вход
35
40
45
50
регулятора 4 тока, на другие входы которого подаются сигналы жесткой и гибкой отрицательной обратной связи по току и гибкой положительной обратной связи по частоте вращения электродвигателя. Регулятор 4 тока, совместно с блоками указанньк обратных связей формирующий зависимость тока якорной цепи двигателя от времени i(t) и компенсирующий электромагнитную постоянную и внутреннюю обратную связь по частоте вращения электродвигателя, т.е. компенсирующий влияние ЭДС, выполнен в виде пропорционально интегрирующего блока. Сигнал с регултора 4 поступает на вход системы 5 формирования импульсов, которая подает импульсы на открытие тиристоров в тиристорном силовом блоке 2, Время 55 подачи импульсов на открытие тиристоров, а следовательно, и напряжение на якорной обмотке электродвигателя зависит от сигнала на выходе регулятора 4 тока.
313
Таким образом, зависимости частот вращения электродвигателя и механизма, а также тока якорной цепи электродвигателя от времени определяются положением задатчика скорости и настройкой регуляторов скорости, тока и блоков обратньк связей.
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель постоянного тока, подключенный к тиристорно му силовому блоку и связанный посредством упругой связи с механизмом последовательно соединенные первьй регулятор частоты вращения, регулятор тока и систему формирования импульсов, выход которой подключен к . входу тиристорно-силового блока, датчик тока, датчик частоты вращения электродвигателя и датчик частоты вращения механизма, выходы которых посредством жестких и гибких обратных связей подключены к входам регуляторов частоты вращения и тока, за- датчик частоты вращения, отличающийся тем, что, с целью повьшения качества регулирования, в
Составитель В.Трофименко Редактор А.Огар Техред в,Кадар Корректор г,Рещетник
Заказ 2432/53 Тираж 660. Подписное
ВНШПИ Государс-ввенного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раущская наб., д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
4 4
него введены второй регулятор частоты вращения, первый вход которого соединен с выходом задатчика частоты вращения, а выход подключен к первому входу первого регулятора частоты вращения, первый пропорционально дифференцирующий блок, включенный между выходом датчика тока и вторым входом регулятора тока, сумматор, входы которого соединены с выходами датчиков частот вращения электродвигатели и механизма, а выход подключен к второму входу первого регулятора частоты вращения, дифференцирующий блок и
второй пропорционально-дифференцирующий блок, входы которых соединены с выходом датчика частоты вращения электродвигателя, а вькоды подключены к третьим входам соответственно
регулятора тока и первого регуля.то- ра частоты вращения, третий и четвертый пропорционально-дифференцирующие блоки, выходы которых подключены соответственно к второму и третьему
входам второго регулятора частоты вращения, а входы соединены с входами датчиков частоты вращения электродвигателя и механизма.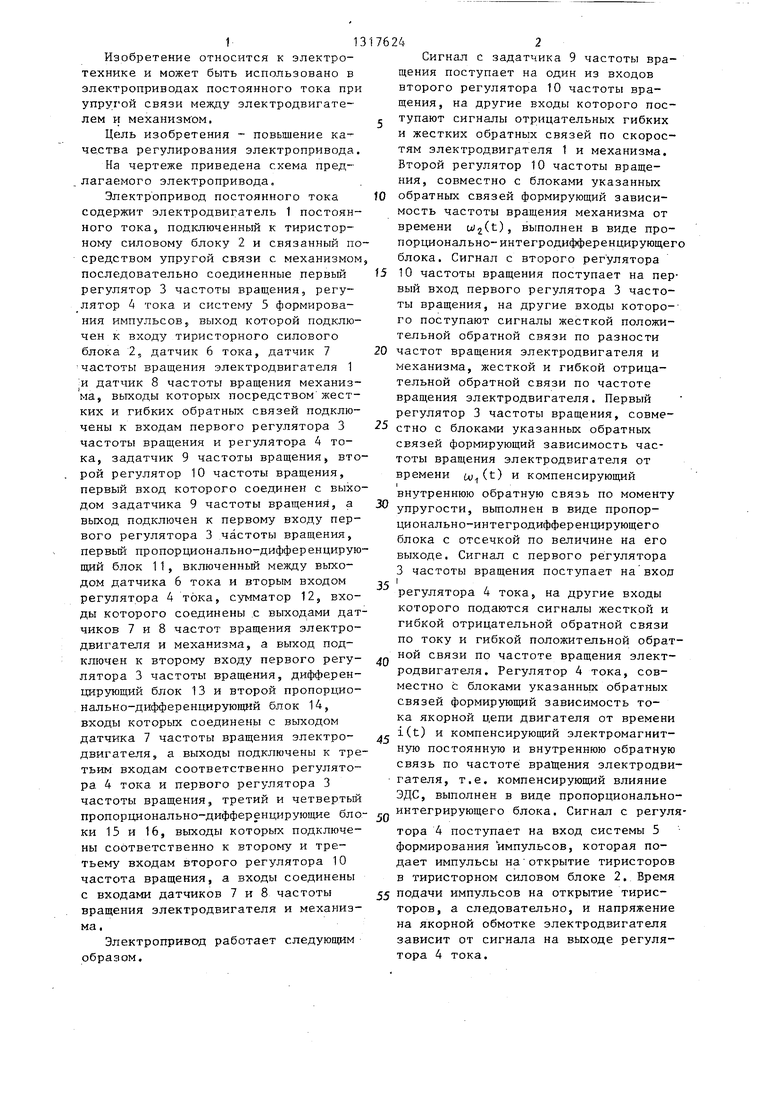

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1989 |
|
SU1760622A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1998 |
|
RU2158467C2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1998 |
|
RU2158468C2 |
| Электропривод постоянного тока | 1989 |
|
SU1704260A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА И УПРУГО СВЯЗАННЫМ С НИМ МЕХАНИЗМОМ | 1996 |
|
RU2096904C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| ЭЛЕКТРОПРИВОД АСТАТИЧЕСКИЙ ПЕРВОГО ПОРЯДКА | 2002 |
|
RU2237343C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2096903C1 |
| Двухдвигательный электропривод намоточной машины | 1981 |
|
SU964944A1 |
) Изобретение относится к электротехнике и может быть использовано в устройствах для управления электродвигателями, соединенными с механизмами упругой связью. Повышение качества регулирования обеспечивается за счет введения второго регулятора 10 скорости, один из входов которого связан с задатчиком 9 скорости, другой инвертирующий вход через пропорционально-дифференцирующий блок 15 соединен с датчиком 7 скорости электродвигателя 1. Третий инвертирующий вход регулятора 10 через другой пропорционально-дифференцирующий блок 16 соединен с датчиком 8 скорости механизма, а выход - с одним из входов первого регулятора 3 dкopocти. В данном устройстве, вели- чина динамической ошибки не зависит от параметров силовой части привода за исключением отношения моментов инерции двигателя и механизма. 1 ил. ( (О
| Система подчиненного регулирования параметров электропривода | 1975 |
|
SU527809A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ключев В.И | |||
| и др | |||
| ..Динамика автоматизированного электропривода с упругой механической связью | |||
| - Электричество, 1973, К 3, Е | |||
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
