Изобретение относится к авиационной технике, в частности к устройствам для управления положением плоских гибких буксируемых систем.
Цель изобретения - расширение эксплуатационных характеристик за счет обеспечения возможности буксировки гибкой системы в заданном диапазоне ее углового положения от вертикальной плоскости.
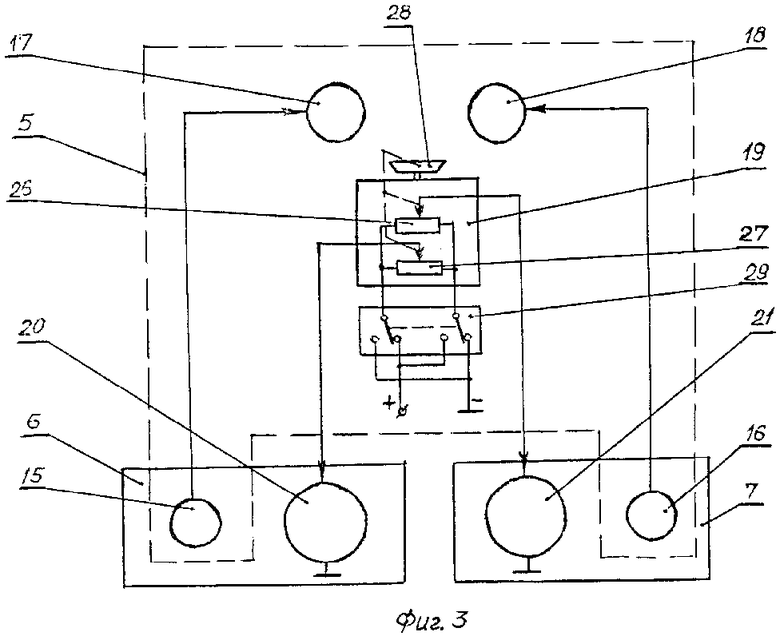
На фиг. 1 изображен общий вид устройства; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - конструкция блока управления механизмами отклонения гибкой системы.
Устройство для буксировки гибкой системы 1 содержит буксирный строп 2, соединенный с буксировщиком 3, механизм 4 отклонения гибкой системы 1 и блок 5 управления ее положением. Устройство снабжено несущими модулями 6, 7, стабилизатором 8 гибкой системы по направлению потока, механизмом 9 отклонения буксируемой системы 1 и гибкой связью 10. Буксируемая гибкая система 1 имеет прямоугольную форму, в ее нижней части в углах 11, 12 закреплены несущие модули 6, 7 с размещенными на каждом из них механизмами 4 и 9 отклонения гибкой системы 1, а верхний угол 13 гибкой системы 1 закреплен на буксирном стропе 2, верхний угол 14 гибкой системы 1 связан со стабилизатором 8 и с одним концом гибкой связи 10, другой конец которой закреплен на буксировщике 3. Блок 5 управления гибкой системой 1 имеет датчики 15, 16 положения гибкой системы 1, размещенные на несущих модулях 6, 7 и индикаторы 17, 18 положения гибкой системы 1, размещенные на буксировщике 3, входы которых связаны с выходами датчиков 15, 16 положения гибкой системы 1, блок 19 регулирования боковой силы механизмом 4 и 9 отклонения гибкой системы 1.
Механизмы 4 и 9 отклонения гибкой системы 1 выполнены в виде двигателей 20, 21, например, двигателей постоянного тока, с двумя выходными валами (или с редуктором), оси которых расположены в поперечной плоскости несущих модулей 6, 7 и на которых с двух сторон закреплены воздушные винты 22 и 23, создающие тягу в поперечном направлении.
Блок 19 регулирования боковой силы механизмов отклонения гибкой системы 1 может быть выполнен, например, в виде потенциометров 26, 27, регулирующих напряжение на обмотках двигателей 20, 21 механизмов 4, 9. Штоки потенциометров 26, 27 связаны с ручкой 28 их синхронного перемещения. Для изменения направления вращения двигателей 20, 21, и соответственно, изменения направления действия боковой силы предусмотрен переключатель 29.
Устройство работает следующим образом.
При буксировке гибкой системы 1 буксировщиком 3 для ее отклонения в поперечной плоскости перемещают ручку 28 синхронного перемещения штоков потенциометров 26,27 блока 5 управления гибкой системой 1, подавая тем самым напряжение на двигатели 20, 21 механизмов 4, 9 отклонения гибкой системы 1. Двигатели 20, 21 приводят во вращение воздушные винты 22, 23, создающие боковую силу приложенную к углам 11, 12 гибкой системы 1. Под действием боковой силы несущие модули 6, 7 отклоняют гибкую систему 1 от вертикального положения в ту или иную сторону в зависимости от направления вращения воздушных винтов 22, 23. По индикаторам 17, 18 определяется текущая величина отклонения гибкой системы 1, и при достижении требуемого угла отклонения гибкой системы 1 с помощью ручки 28 синхронного перемещения поддерживается заданное значение напряжения на двигателях 20, 21. Для обеспечения плоской формы гибкой системы 1 вдоль направления потока к ее углам 12 и 14 прикладываются усилия от стабилизатора 8 и несущего модуля 7, пропорциональные силам их лобовых сопротивлений, а в вертикальном направлении плоская форма обеспечивается благодаря наличию усилий от буксирного стропа 2 и гибкой связи 10 и веса несущих модулей 6, 7. (56) Авторское свидетельство СССР N 1067741, кл. B 63 G 13/00, 1980.
Авторское свидетельство СССР N 1727326, кл. B 64 D 3/00, 25.11.88.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| Устройство для буксировки измерителя магнитного поля | 1990 |
|
SU1770930A1 |
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ | 1989 |
|
SU1753669A1 |
| БУКСИРУЕМАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1989 |
|
SU1746632A1 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1663888A1 |


Изобретение относится к авиационной технике, в частности к устройствам для управления положением гибких буксируемых систем. Цель изобретения - расширение эксплуатационных характеристик за счет обеспечения возможности буксировки гибкой системы в заданном диапазоне ее углового положения от вертикальной плоскости. В нижней части гибкой системы закреплены несущие модули с размещенными на них механизмами отклонения буксируемой системы, выполненными в виде двигателей с воздушными винтами, создающими тягу в поперечном направлении и отклоняющими гибкую систему от вертикальной плоскости. 3 ил.
УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ, содержащее буксировщик, связанный через буксирный строп с размещенным в нижней части гибкой системы у ее передней кромки несущим модулем, гибкую связь, одним концом закрепленную на буксировщике, а другим связанную с верхним углом гибкой системы у ее задней кромки и со стабилизатором гибкой системы, несущий модуль, закрепленный в нижней части гибкой системы у ее задней кромки, отличающееся тем, что, с целью расширения эксплуатационных характеристик за счет обеспечения возможности буксировки гибкой системы в заданном диапазоне ее углового отклонения от вертикальной плоскости, оно снабжено блоком управления положением гибкой системы, размещенным на буксировщике, расположенными на несущих модулях датчиками углового положения гибкой системы и механизмами отклонения гибкой системы, причем датчики углового положения гибкой системы и механизмы отклонения гибкой системы связаны между собой через блок управления положением гибкой системы, а буксирный строп связан с передней кромкой гибкой системы в ее нижней и верхней частях.
