1
(21)M0221V31-08
(22)01 ..88
(6) 23.01.90. Бюл. № 3
(71)Институт машиноведения
им. А.А.Благонравова (SU) и Институт технической кибернетики и робототехники Болгарской АН (BG)
(72)А.С.Ангелов, Г.С.Стайнов, Н.С.Шиваров, О.Б.Манолов, (BG) А.И.Корендясев, Б.Л.Саламандра, Н.А.Серков, Л.И.Тывес, Н.И.Пинчук и В.А.Самсонов (SU)
(53) 621.229.72 (088.8)
(56) Авторское свидетельство СССР
№ 733975, кл. В 25 J 9/06, 1978..
(5М ПРОМЫ1ШЕННЫЙ РОБОТ
(57) Изобретение относится к машиностроению и предназначено для устройств механизации и автоматизации основных и вспомогательных операций в промышленности. Цель изобретения - повышение точности позиционирования за счет снижения скорости подхода звеньев к упорам-фиксаторам. Перед началом работы муфта 10 размыкается и поворотная каретка разворачивается приводом на некоторый угол, после этого муфта замыкается. При размыкании упоров-фиксаторов 5 и 6 исполни
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1988 |
|
SU1768381A1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| ПОВОРОТНЫЙ ПРИВОД ЗВЕНА РЕЗОНАНСНОЙ МЕХАНИЧЕСКОЙ РУКИ | 2003 |
|
RU2271273C2 |
| МЕХАНИЧЕСКАЯ РУКА | 1993 |
|
RU2065354C1 |
| Промышленный робот | 1983 |
|
SU1119837A1 |
| Устройство прерывистого вращения | 1989 |
|
SU1703896A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438857C2 |
| Модуль резонансного манипулятора | 1988 |
|
SU1611730A1 |
| Модуль манипулятора | 1991 |
|
SU1798177A1 |
| Промышленный робот | 1988 |
|
SU1713797A1 |
Изобретение относится к машиностроению и предназначено для устройств механизации и автоматизации основных и вспомогательных операций в промышленности. Цель изобретения - повышение точности позиционирования за счет снижения скорости подхода звеньев к упорам-фиксаторам. Перед началом работы муфта 10 размыкается и поворотная каретка разворачивается приводом на некоторый угол, после этого муфта замыкается. При размыкании упоров-фиксаторов 5 и 6 исполнительное устройство, состоящее из звеньев 2, одно из которых шарнирно установлено на основании, начинает движение в направлении против часовой стрелки. При достижении упором, жестко установленным на каретке, опорной поверхности 11 упругого элемента 4 аккумулятора механической энергии, этот упор вступает во взаимодействие с опорной поверхностью. Движение звеньев исполнительного устройства далее происходит по инерции до момента взаимодействия опорной поверхности 12, выполненной на втором конце упругого элемента 4, с неподвижным упором, жестко установленным на основании. После этого начинается торможение звеньев исполнительного устройства за счет закручивания
ботез илья георгиевич
чупина людмила алексеевна
гузган николай архиповичмаNIрULатоR28 277030 кишинев, бурлаченко 5/4-3028 277030 кишинев, бурлаченко 5/4-30
28 277038 кишинев, пр.мира 3/2-63
28 277043 кишинев, пр.мира 20-117
28 277028 кишинев, прянишникова 9/1-36Изобретение относится к области машиностроения, в частности к промышленным роботам и манипуляторам. Целью изобретения является улучшение дин
J3
Ј.5
VO
тельное устройство, состоящее из звеньев 2, одно из которых шарнирно установлено на основании, начинает движение в направлении против часовой стрелки. При достижении упором, жестко установленным на каретке, опорной поверхности 11 упругого элемента 4 аккумулятора механической энергии этот упор вступает во взаимодействие с опорной поверхностью. Движение звеньев исполнительного устройства далее происходит по инерции до момента взаимодействия опорной поверхности 12, выполненной на втором конце упругого элемента Ц, с неподвижным упором, жестко установленным на основании. После этого начинается торможение звеньев исполни
Изобретение относится к машиностроению и предназначено для уст- ройств механизации и автоматизации основных и вспомогательных операций в промышленности.
Цель изобретения - повышение точности выхода звена в программную по- зицию.
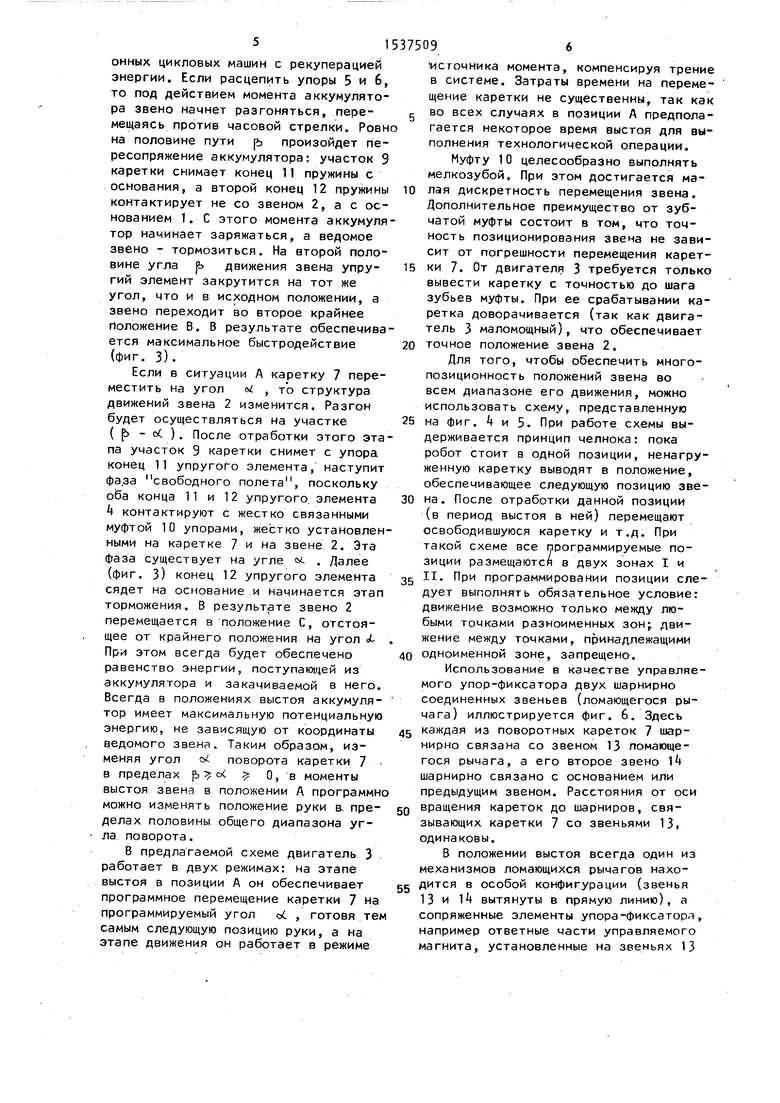
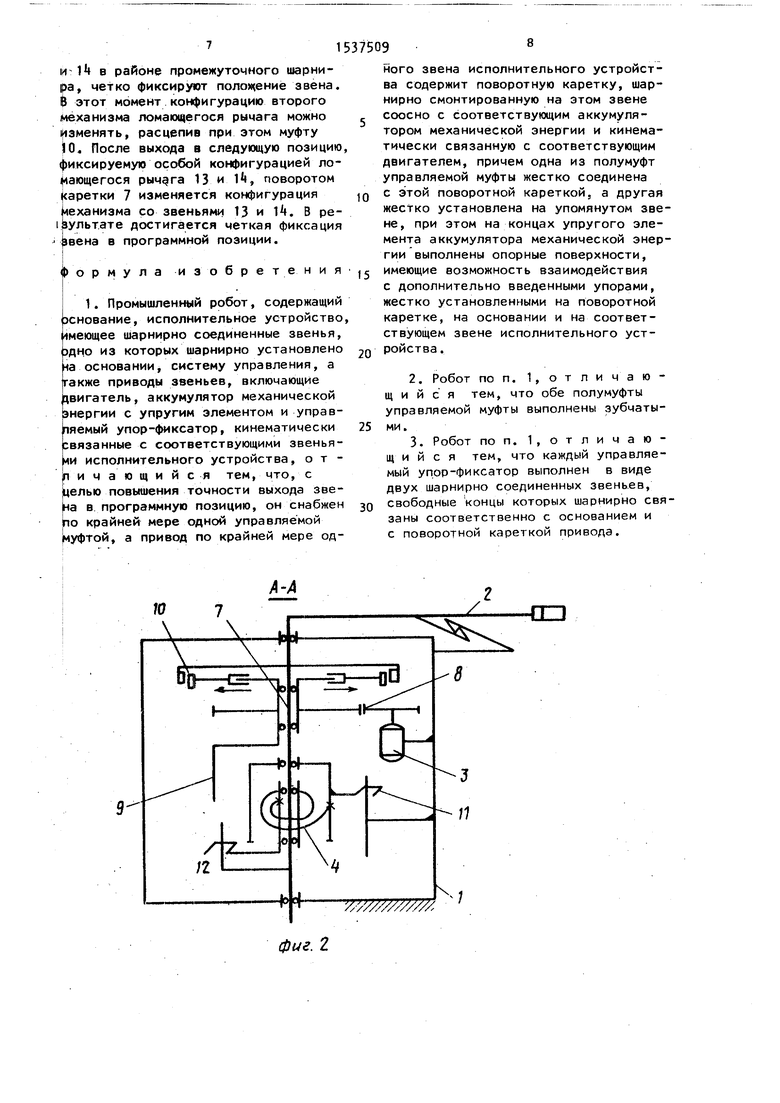
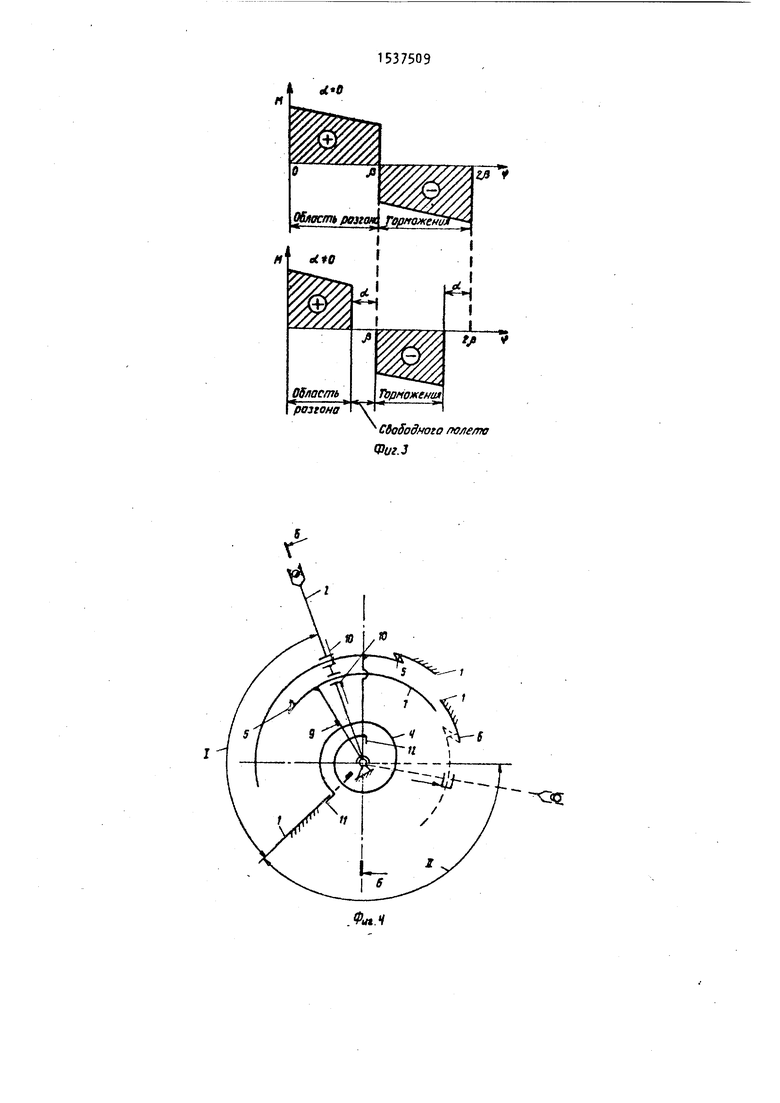
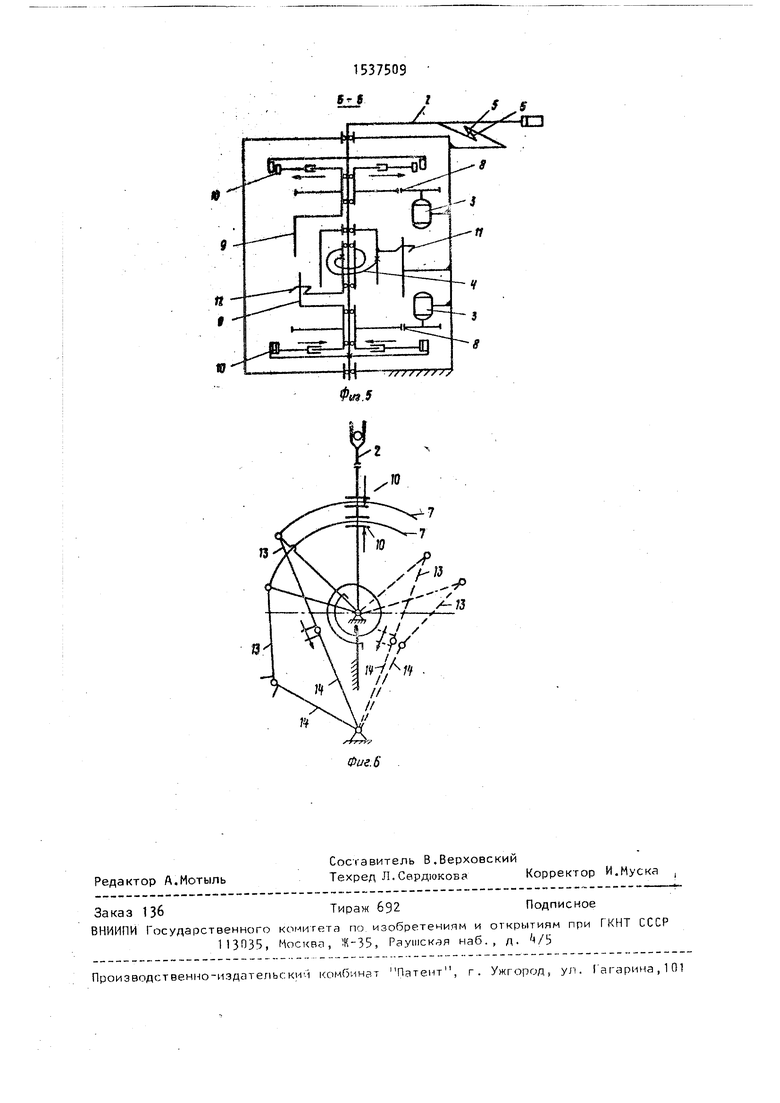
На фиг. 1 представлен промышленный робот, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - график изменения момента, приложенного к ведомому звену исполнительного устройства со стороны аккумулятора в функции угла поворота ведомого звена0, на фиг. А - устройство, вариант исполнения, обеспечивающий регулирование поло- жения обоих упоров; на фиг. 5 - разрез Б-Б на фиг. Ь; на фиг. 6 - то же, в случае использования в качестве механизма управляемого упора-фиксатора двух шарнирно соединенных звеньев (ломающегося рычага).
Промышленный робот содержит основание 1, шарнирно соединенные звенья 2 исполнительного .устройства {на схеме показано только одно звеИо), ин- дивидуальный привод звена, включающий двигатель 3, аккумулятор механической энергии с упругим элементом k (пружиной) и механизм управляемого упорафиксатора, содержащий подвижный 5м неподвижный 6 упоры (звенья) и приводное устройство их размыкания (не показано). Робог снабжен также поворотной кареткой 7, кинематически святельного устройства за счет закручивания упругого элемента аккумулятора механической энергии. После ос- тановки звеньев 2 срабатывают упоры- фиксаторы 5 и 6 второго крайнего положения, фиксируя исполнительное устройство. Для движения в обратном направлении упоры-фиксаторы азмыкаются
и цикл повторяется. Для более надежной работы муфты 10, одна из полумуфт которой жестко закреплена на ка- ретке, а другая на звене 2, выполняется зубчатой, а упоры-фиксаторы 5 и
6 - в виде двух шарнирно соединенных звеньев, свободные концы которых шарнирно закреплены соответственно на основании и каретке. 2 э.п.ф-лы, 6 ил.
5
5
0
5
Q
занной с подвижным упором 5 (.в данном случае он закреплен на каретке на упругом подвесе) и с двигателем 3 с помощью зубчатой пары 8. Каретка 7 установлена с возможностью свободного вращения вокруг оси аккумулятора относительно звена 2 и имеет возможность контакта участком 9 (упором) с упругим элементом k. Между кареткой 7 и звеном 2 установлена управляемая муфта 10, выполненная, например, зубчатой с мелким (мышиным) зубом.
Устройство работает следующим образом.
В исходном положении А, когда подвижный 5 и неподвижный 6 упоры второго механизма фиксации защелкнуты, упругий элемент k аккумулятора, контактирующий площадкой 11 (опорной поверхностью) с основанием 1, а плоифдкой 12 (опорной поверхностью) - со звеном 2, развивает момент против часовой стрелки, который воспринимается неподвижным упором 6. В этой ситуации каретка 7 не воспринимает .никакой нагрузки, а если отключить зубчатую муфту 10, -го ее легко можно повернуть вокруг оси аккумулятора на программируемый угол V с помощью маломощного двигателя 3. После отработки требуемого угла муфта 10 опять включается и жестко связывает каретку 7 со звеном 2.
Работа устройства 0 полностью соответствует PC I JOTP традици
онных цикловых машин с рекуперацией энергии. Если расцепить упоры 5 и 6, то под действием момента аккумулятора звено начнет разгоняться, пере- мещаясь против часовой стрелки. Ровн на половине пути Ь произойдет пересопряжение аккумулятора: участок 9 каретки снимает конец 11 пружины с основания, а второй конец 12 пружины контактирует не со звеном 2, а с основанием 1. С этого момента аккумулятор начинает заряжаться, а ведомое звено - тормозиться. На второй половине угла Ь движения звена упругий элемент закрутится на тот же угол, что и в исходном положении, а звено переходит во второе крайнее положение В. В результате обеспечивается максимальное быстродействие (фиг. 3).
Если в ситуации А каретку 7 переместить на угол } то структура движений звена 2 изменится. Разгон будет осуществляться на участке ( Ь - d. ). После отработки этого этапа участок 9 каретки снимет с упора конец 11 упругого элемента, наступит фа.за свободного полета, поскольку оба конца 11 и 12 упругого элемента 4 контактируют с жестко связанными муфтой 10 упорами, жестко установленными на каретке 7 и на звене 2. Эта фаза существует на угле ut . Далее (фиг. 3) конец 12 упругого элемента сядет на основание и начинается этап торможения. В результате звено 2 перемещается в положение С, отстоящее от крайнего положения на угол J- При этом всегда будет обеспечено равенство энергии, поступающей из аккумулятора и закачиваемой в него. Всегда в положениях выстоя аккумуля- тор имеет максимальную потенциальную энергию, не зависящую от координаты ведомого звена. Таким образом, изменяя угол Ы поворота каретки 7 в пределах р г о 0, в моменты выстоя звена в положении А программн можно изменять положение руки в. пределах половины общего диапазона угла поворота.
В предлагаемой схеме двигатель 3 работает в двух режимах: на этапе выстоя в позиции А он обеспечивает программное перемещение каретки 7 на программируемый угол сЈ , готовя тем самым следующую позицию руки, а на этапе движения он работает в режиме
0
5
исгочника момента, компенсируя трение в системе. Затраты времени на перемещение каретки не существенны, так как во всех случаях в позиции А предполагается некоторое время выстоя для выполнения технологической операции.
Муфту 10 целесообразно выполнять мелкозубой. При этом достигается малая дискретность перемещения звена. Дополнительное преимущество от зубчатой муфты состоит в том, что точность позиционирования звена не зависит от погрешности перемещения карет5 ки 7. От двигателя 3 требуется только вывести каретку с точностью до шага зубьев муфты. При ее срабатывании каретка доворачивается (так как двигатель 3 маломощный), что обеспечивает точное положение звена 2.
Для того, чтобы обеспечить много- позиционность положений звена во всем диапазоне его движения, можно использовать схему, представленную на фиг. k и 5. При работе схемы выдерживается принцип челнока: пока робот стоит в одной позиции, ненагруженную каретку выводят в положение, обеспечивающее следующую позицию зве0 на. После отработки данной позиции (в период выстоя в ней) перемещают освободившуюся каретку и т.д. При такой схеме все программируемые позиции размещаются в двух зонах I и
5 II. При программировании позиции следует выполнять обязательное условие: движение возможно только между любыми точками разноименных зон движение между точками, принадлежащими
0 одноименной зоне, запрещено.
Использование в качестве управляемого упор-фиксатора двух шарнирно соединенных звеньев (ломающегося рычага) иллюстрируется фиг. 6. Здесь каждая из поворотных кареток 7 шарнирно связана со звеном 13 ломающегося рычага, а его второе звено И шарнирно связано с основанием или предыдущим звеном. Расстояния от оси вращения кареток до шарниров, связывающих каретки 7 со звеньями 13. одинаковы.
В положении выстоя всегда один из механизмов ломающихся рычагов нахо5 Дится 8 особой конфигурации (звенья 13 и И вытянуты в прямую линию), а сопряженные элементы упора-фиксатора, например ответные части управляемого магнита, установленные на звеньях 13
5
0
и Ik в районе промежуточного шарнира, четко фиксируют положение звена. б этот момент конфигурацию второго механизма ломающегося рычага можно Изменять, расцепив при этом муфту 10. После выхода в следующую позицию фиксируемую особой конфигурацией ломающегося рычага 13 и , поворотом Царетки 7 изменяется конфигурация механизма со звеньями 13 и . В результате достигается четкая фиксация эвена в программной позиции.
Формула изобретения
фиг. 2
ного звена исполнительного устройства содержит поворотную каретку, шарнирно смонтированную на этом звене соосно с соответствующим аккумулятором механической энергии и кинематически связанную с соответствующим двигателем, причем одна из полумуфт управляемой муфты жестко соединена
с этой поворотной кареткой, а другая жестко установлена на упомянутом звене, при этом на концах упругого элемента аккумулятора механической энергии выполнены опорные поверхности,
имеющие возможность взаимодействия с дополнительно введенными упорами, жестко установленными на поворотной каретке, на основании и на соответствующем звене исполнительного устройства .
с поворотной кареткой привода.
СО
N
Свободного no/ie/no Фиг.З
ч,
