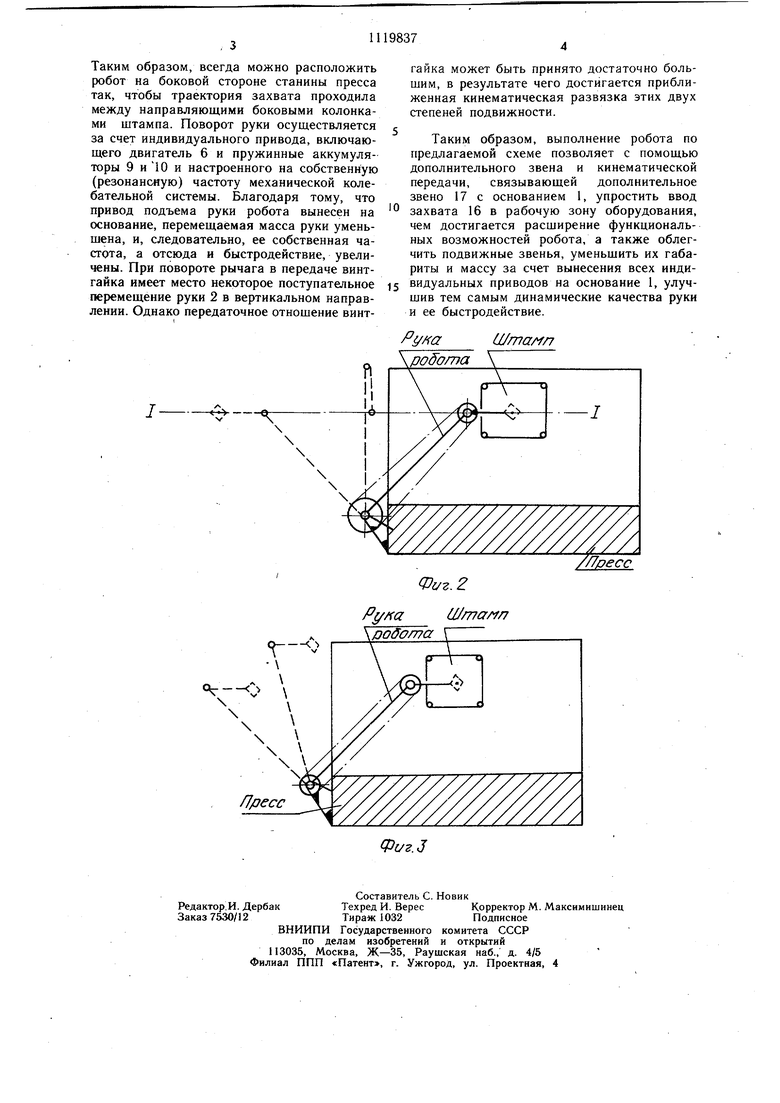
Изобретение относится к машиностроению, а именно для загрузки-выгрузки быстродействующих штамповочных прессов. Известный промышленный робот, содержащий неподвижное основание с установленной на нём подъемно-поворотной механической рукой, кинематически связанные с рукой приводы подъема и поворота руки, захват, аккумуляторы механической энергии, упоры-фиксаторы крайних положений руки 1. Недостатком известного устройства является перемещение захвата по окружности, что ограничивает скорость перемещения руки и область применения робота. Цель изобретения - повышение скорости перемещения и надежности в работе. Цель достигается тем, что промышленный робот, содержащий неподвижное основание с установленной на нем подъемноповоротной механической рукой, кинематически связанные с рукой приводы подъема и поворота руки, захват, аккумуляторы механической энергии, упоры-фиксаторы крайних положений руки, снабжен дополнительным звеном, шарнирно закрепленным одним концом на руке, на другом конце дополнительного звена жестко закреплен захват, а дополнительное звено кинематически связано с основанием передаточным отношением i, определяемым соотношением j | 1 гароь и(1-лГ где Л - отношение длины дополнительного звена к длине руки. При этом приводы подъема и поворота руки установлены на основании и связаны между собой механизмом развязки вращательного и поступательного перемещений руки, выполненным в виде передачи винтгайка, ось которой совпадает с осью поворота руки, причем один из элементов связан с приводом подъема руки, а другой - жестко соединен с рукой и кинематически связан с приводом поворота руки. На фиг. 1 представлена кинематическая схема предлагаемого промышленного робота; на фиг. 2 и 3 - примеры возможной компоновки робота на прессе. Промышленный робот состоит из неподвижного основания 1, на котором установлена подъемно-поворотная механическая рука 2, соединенная с основанием I поступательной 3 и вращательной 4 кинематическими передачами, оси которых параллельны, индивидуальных приводов поступательного и вращательного движения механической руки 2, включающих двигатели 5 и 6 и аккумуляторы механической энергии, например, в виде пружин 7-10, программноуправляемых упоров-фиксаторов 11 -14 крайних положений и кинематических цепей 15 для обеспечения перемещений подъемно-поворотной руки 2 и захвата 16. Робот также снабжен дополнительным звеном 17, соединенным вращательной кинематической передачей 18 с подъемно-поворотной рукой 2 и кинематической передачей 19, связывающей дополнительное звено 17 с основанием 1. При этом индивидуальные приводы руки установлены на основании 1, а механизм развязки вращательного и поступательного перемещения выполнен в виде соосной передачи винт-гайка, ось которой совпадает с осью вращения подъемно-поворотной руки 2. Один из элементов передачи - винт 20, связан с индивидуальным приводом поступательного движения руки, а другой элемент-гай1 а 21, жестко соединен с подъемно-поворотной рукой 2 и кинематически связан с индивидуальным приводом вращательного движения руки. Кинематическая передача 19, связывающая дополнительное звено 17 с основанием 1, может быть выполнена на гибких элементах, например тросах или цепях, а ее переда точное отношение i и отношение Я длины дополнительного звена 17 к длине подъемно-по воротного рычага должны удовлетворять условию (1) и выбираются из условий технологической задачи, когда захват необходимо перемещать по траектории, близкой к прямой, и задано расстояние от этой прямой до оси поворота подъемно-поворотной руки 2: , , 1 ancsiMfi-j В тех случаях, когда при повороте подъемно-поворотного рычага ориентация детали относительно основания не должна имзеняться, передаточное отношение кинематической передачи должно быть равно 1. На фиг. 2 представлена примерная компановка робота на прессе при /} 0,293, i 3, полном ходе по прямой S 21 и расстоянии до нее Н 0,707 При повороте подъемно-поворотной руки 2 на j, звено 17 повернется относительно вертикальной оси на , а центр захвата будет двигаться по приближенной прямой I-. На фиг. 3 представлена примерная ком поновка робота на прессе при i L Предлагаемая конструкция работает следующим образом. При наиболее рациональной компоновке (фиг. 2) механическая рука за счет дополнительного звена 17 и кинематической связи 19 этого звена с основанием 1 обеспечивает почти прярлолииейное движение ззхвата 16, а не движение по окружности.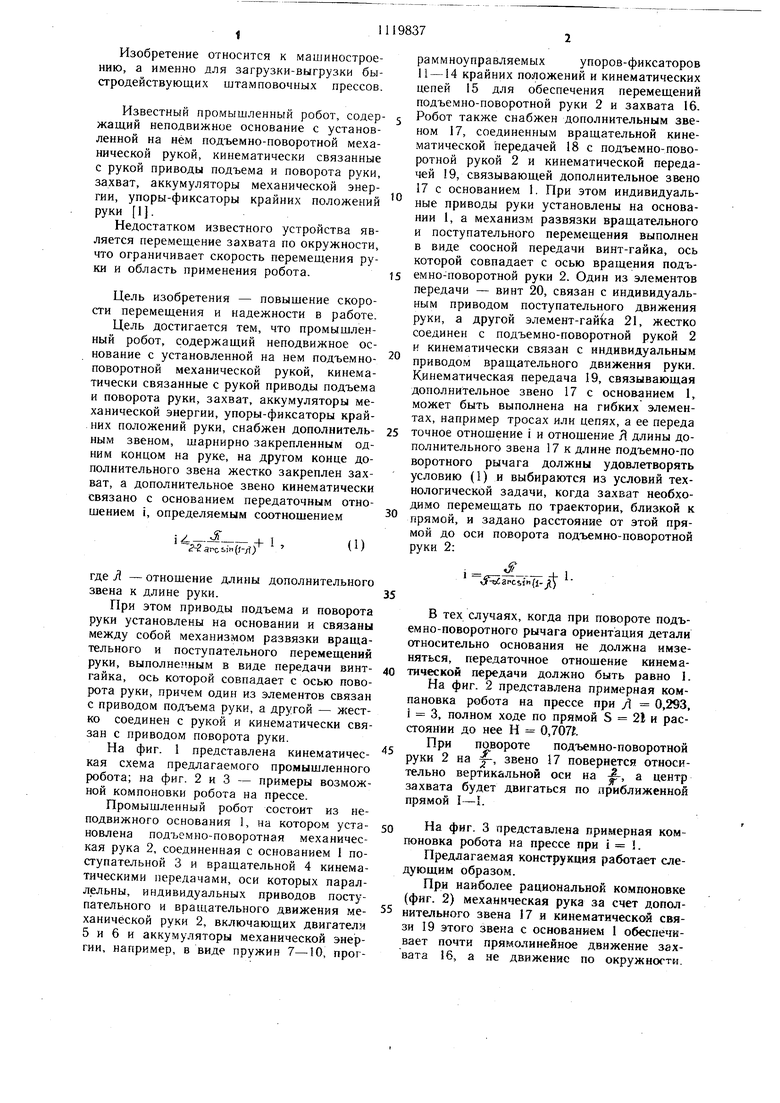
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1988 |
|
SU1713797A1 |
| Манипулятор | 1989 |
|
SU1660953A1 |
| Промышленный робот | 1984 |
|
SU1268252A1 |
| Промышленный робот | 1987 |
|
SU1437216A1 |
| Промышленный робот | 1977 |
|
SU837850A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Манипулятор с цикловым управлением | 1983 |
|
SU1110624A2 |
| Рука манипулятора | 1985 |
|
SU1306705A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Промышленный робот | 1988 |
|
SU1563965A1 |
1. ПРОМЫШЛЕННЫЙ РОБОТ, содержащий неподвижное основание с установленной на нем подъемно-поворотной механической ,рукой, кинематически связанные с рукой приводы подъема и поворота руки, захват, аккумуляторы мехаиической энергии, упоры-фиксаторы крайних положений руки, отличающийся тем, что. // 19 7S с целью повышения скорости перемещения и надежности в работе, он снабжен дополнительным звеном, шарнирно закрепленным одним концом на руке,на другом конце дополнительиого звена жестко закреплен захват, а дополнительное звено кинематически связано с основанием передаточным отношением i, определенным соотношением + 1 1 -Zafcsln и-А) где f - отношение длины дополнительного звена к длине руки. 2. Робот по п. 1, отличающийся тем, что приводы подъема и поворота руки установлены на основании и связаны между собой механизмом развязки вращательного и поступательиого перемещений руки, выполненным в виде передачи винт-гайка, ось «Я которой совпадает с осью поворота руки, причем один из элементов связан с приводом подъема руки, а другой - жестко соединен с рукой и кинематически связан с приводом поворота руки. 00 со 75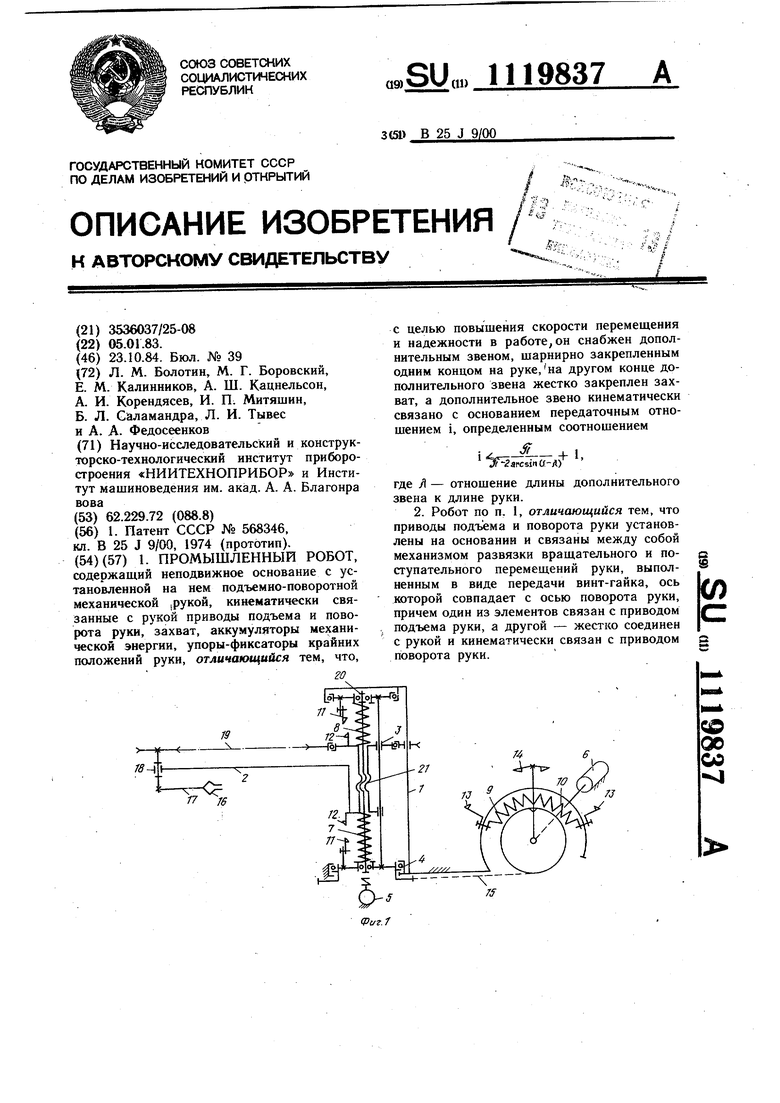
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механическая рука | 1975 |
|
SU568346A3 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
