Фие.1
Изобретение относится к машиностроению, а именно к быстродействующим промышленным роботам для автоматизации технологических и вспомогательных операций обработки и загрузки - выгрузки дета- лей.
Цель изобретения - повышение надежности за счет улулшемият динамического режима прйВйЗвдТ ЈД |
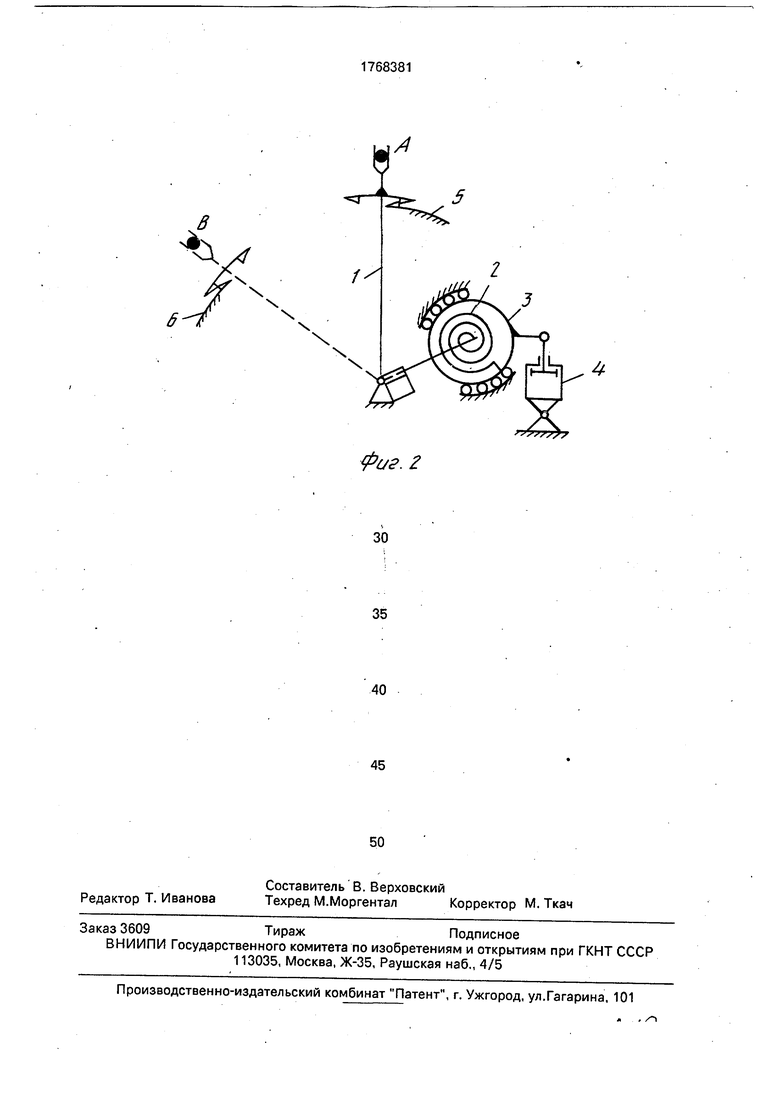
На г едставлей общий вид робо- та; на фиг. 2 - вариант исполнения при использовании пневмоцилиндра.
Звено 1 робота (фиг. 1) кинематически связано с упругим элементом 2 аккумулятора механической энергии. Аккумулятор ме- ханической энергии выполнен в отдельном корпусе 3, установленном с возможностью поворота вокруг оси аккумулятора. Связь звена 1 робота с двигателем 4 привода, компенсирующим потери на трение в системе, выполнена через упругий элемент 2 аккумулятора, а корпус 3 аккумулятора кинематически связан с двигателем 4 привода. В состоянии покоя звено 1 взаимодействуете управляемым упором-фиксатором 5 или 6 в одном из своих крайних положений. В зависимости от силовых характеристик двигателя 4 кинематическая цепь привода может включать редуктор 7.
Промышленный робот работает следу- ющим образом.
В исходном положении (показано сплошными линиями) звено 1 находится в т.А на одном из управляемых упоров-фиксаторов (в данном случае на упоре 5). Упругий элемент 2 аккумулятора развивает момент часовой стрелки, пытаясь сдвинуть звено с упора.
В период выстоя звена в положении А, пока осуществляется технологическая one- рация с помощью двигателя 4 привода, поворачивают корпус аккумулятора на некоторый угол против часовой стрелки, увеличивая тем самым закрутку упругого элемента 2 аккумулятора, повышая уровень потен циальной энергии аккумулятора на величину работы сил трения. Теперь звено 1 придет в симметричное положение В.
В новом положении аккумулятор перезарядится, и пока осуществляется выстой, двигателем 4 осуществляется поворот корпуса 3 в противоположную сторону, что обеспечит компенсацию потерь на трение на следующем этапе движения.
Основное требование, которое необходимо удовлетворить в этой системе, - это то, чтобы двигатель 4 удерживал момент, развиваемый упругим элементом. Для этого устанавливается редуктор 7 привода, который имеет самотормозящую передачу. Отрабатывание требуемого угла поворота корпуса 3 аккумулятора энергии может быть осуществлено любым стандартным способом: по механическим упорам, по контактным выключателям, с помощью следящей системы и т. п.
Если в качестве двигателя привода использовать короткоходовый пневмоци- линдр (фиг. 2), то схема привода существенно упрощается, что позволяет достаточно надежно осуществлять компенсацию потерь на трение в робототехнических системах с рекуперацией механической энергии.
Формула изобретения
Промышленный робот, содержащий основание, звено, шарнирно установленное на основании, упоры-фиксаторы, жестко установленные на основании и взаимодействующие со звеном, аккумулятор механической энергии, выполненный в виде упругого элемента, один конец которого кинематически связан со звеном, а также привод, отличающийся тем, что, с целью повышения надежности за счет улучшения динамического режима привода, он снабжен корпусом, шарнирно установленным на основании и кинематически связанным с вторым концом упругого элемента аккумулятора механической энергии, при этом привод кинематически связан с этим корпусом.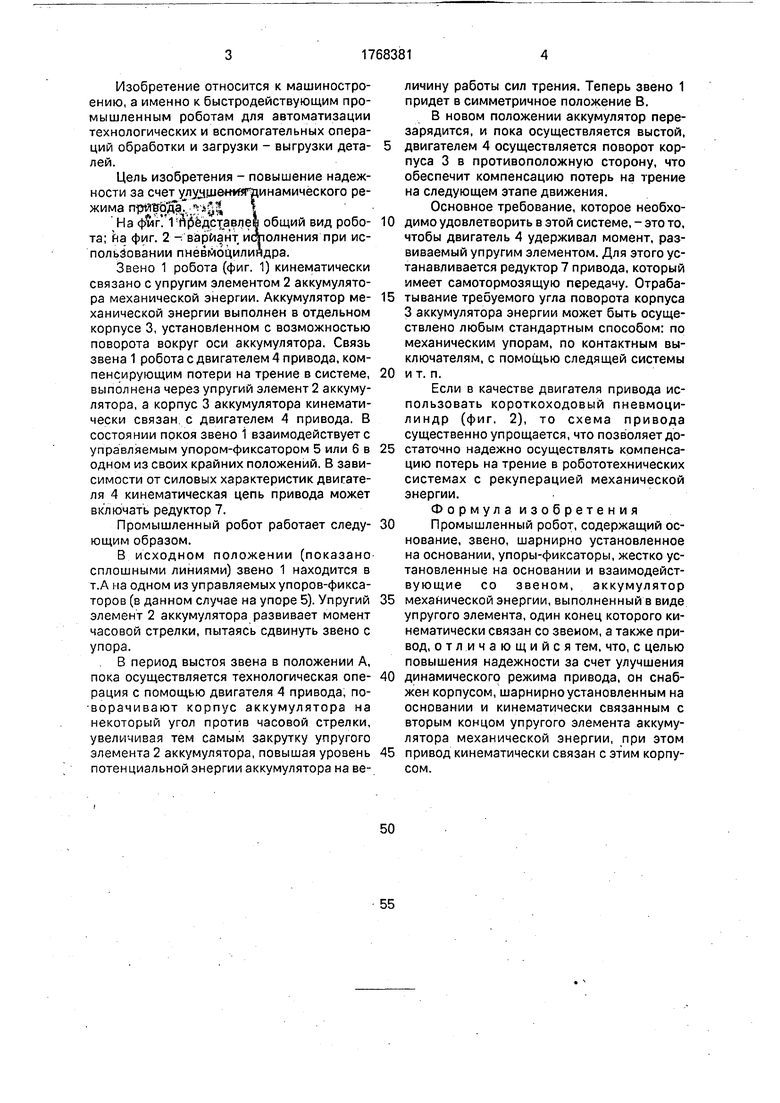
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Автоматический манипулятор с цикловым управлением | 1983 |
|
SU1151449A2 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| Промышленный робот | 1988 |
|
SU1713797A1 |
| Устройство прерывистого вращения | 1989 |
|
SU1703896A1 |
| Механическая рука | 1982 |
|
SU1110623A1 |
| Модуль робота | 1990 |
|
SU1722809A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1611730A1 |
| Промышленный робот | 1983 |
|
SU1119837A1 |
| Поворотное устройство | 1991 |
|
SU1810683A1 |
Изобретение относится к машиностроению, а именно к быстродействующим промышленным роботам для автоматизации технологических и вспомогательных операций. Цель изобретения - повышение надежности за счет улучшения динамического режима привода. В исходном положении звено 1 находится на одном из управляемых упоров - фиксаторов (в данном случае - 5). Упругий элемент 2 аккумулятора механической энергии развивает момент, направленный против часовой стрелки. В период выстоя звена корпус 3 поворачивается с помощью привода против часовой стрелки, за счет чего увеличивается энергия аккумулятора. После этого звено переходит в симмет- ричное положение, где фиксируется упором-фиксатором 6. В новом положении приводом осуществляется поворот корпуса 3 в противоположную сторону, что обеспечивает компенсацию потерь на трение на следующем этапе движения. 2 ил. ел С
Фаг. г
| Промышленный робот | 1983 |
|
SU1119837A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
