щх / лш/:-/,ф Чт Г
IТ
Ц
/ ffj S / ff 7 &
И
VI
О
00
XI
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1991 |
|
SU1799725A1 |
| Модуль манипулятора | 1987 |
|
SU1466934A1 |
| Многопозиционный манипулятор | 1987 |
|
SU1502293A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| Автоматический выключатель | 1987 |
|
SU1495873A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1611730A1 |
| Модуль промышленного робота | 1986 |
|
SU1399110A1 |
| Автоматический манипулятор с цикловым управлением | 1983 |
|
SU1151449A2 |
| Манипулятор с цикловым управлением | 1978 |
|
SU738865A1 |
Использование: в манипуляторострое- нии в качестве исполнительного модуля промышленного робота с цикловым управ3 . «iлением. Подвижное звено 2 взаимодействует с упругим элементом 3 аккумулятора механической энергии при его перемещении и с основными упорами 13. Управляемые фиксаторы определяют его положение.-Дополнительные упоры 7 установлены на одной из двух частей фиксатора с возможностью их взаимодействия с выходом 6 привода, а датчики связаны с управляемыми элементами 12 и 14 подвода - отключения энэргоноси- теля и реверса привода, при этом привод подвижного звена выполнен несамотормо- зящим. 3 ил.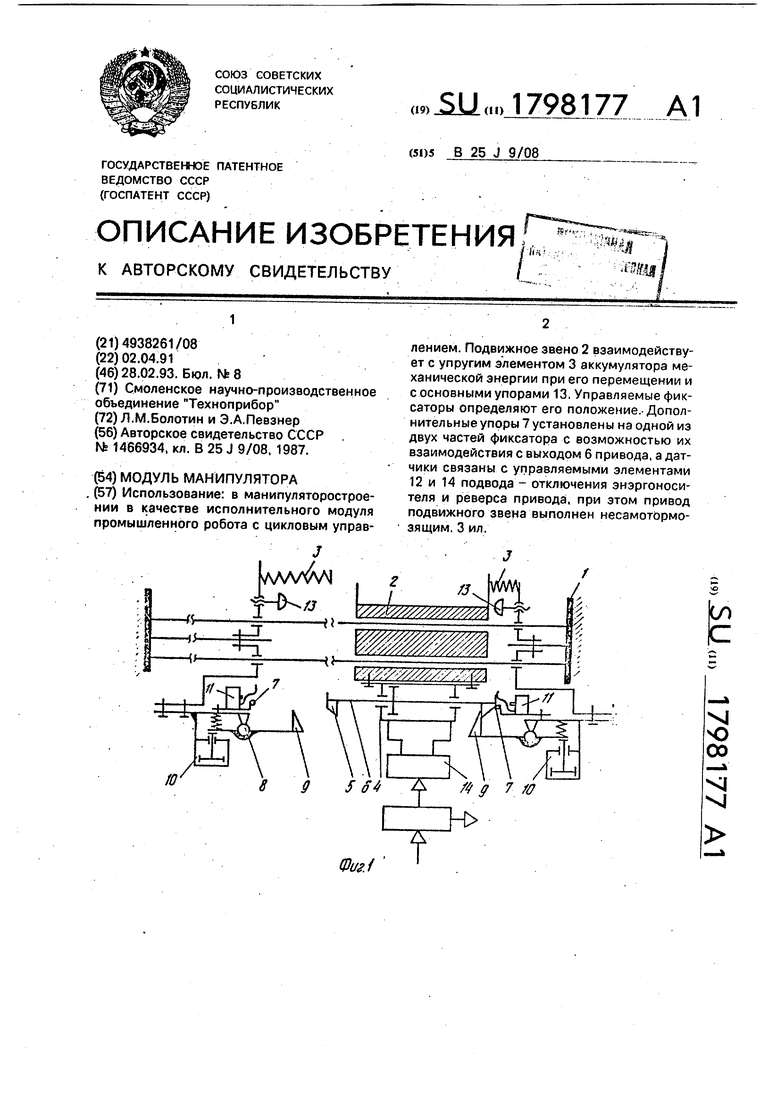
Фиг.{
гт
Изобретение относится к машиностроению, конкретнее к манипуляторострое- нию, и может быть использовано в качестве исполнительного модуля промышленного робота (ПР) с цикловым управлением.
Известны модули манипуляторов, содержащие основание, силовой привод и исполнительное подвижное звено, взаимодействующее с упругим элементом аккумулятора механической энергии, управляемые фиксаторы с приводным механизмом.
Недостатком такой схемы построёни модулей является переход подвижного звена через запрограммированную позицию и последующий возврат к этой позиции, что обусловлено необходимостью надежного взаимодействия управляемого фиксатора с подвижным звеном. Этот переход через запрограммированную позицию является неприемлемым для многих случаев практического применения таких устройств и может вызвать поломку исполнительного подвижного звена при столкновении с обслуживаемым оборудованием.
Известны усовершенствованные модули манипуляторов, лишенные этого недо-; статка. Известный модуль манипулятбра содержит основание, на котором установлено подвижное звено, взаимодействующее с упругим элементом аккумулятора механической энергии, привод перемещения подвижного звена и управляемые фиксаторы его положения, состоящие из двух частей, одна из которых связана с выходом привода перемещения подвижного звена.
Недостатком такого устройства является недостаточное быстродействие и плавность движения модуля, что обусловлено остановкой подвижного звена и потерей времени между моментами фиксации выхода привода подвижного звена в механизме фиксаторов и подачи команды на подтягивание подвижного звена к упору точки позиционирования. Установка датчика фиксации выхода привода подвижного зве на в механизме фиксаторов известного модуля затруднительна из-за использования в конструкции многозубой рейки(в виде которой выполнена одна из частей управляемого фиксатора),
Целью изобретения является повышение быстродействия и плавности движения.
Это достигается тем, что в модуле манипулятора, содержащем основание, на котором установлено подвижное звено, взаимодействующее с упругим элементом аккумулятора механической энергии, при- . вод перемещения подвижного звена и уп- равляемые фиксаторы его положения, состоящие из двух частей, одна из которых
связана с выходом привода перемещения подвижного звена, применены следующие усовершенствования.
Он снабжен дополнительным упором,
установленным на корпусе той части фиксатора, что не связана с выходом привода, с возможностью взаимодействия с выходом привода, датчиком его фиксации в механизме фиксаторов и управляемым элементом
О отключения энергоподвода к приводу перед взаимодействием его выхода с дополнительным упором и включения энергоподвода к приводу по сигналам датчика фиксации. Принципиально то, что в предлагаемом уст5 ройстве привод подвижного звена должен быть выполнен несамотормозящим.
Конструктивно модуль манипулятбра может быть выполнен так, что привод подвижного звена установлен как на основа0 нии, так и на самом подвижном звене.
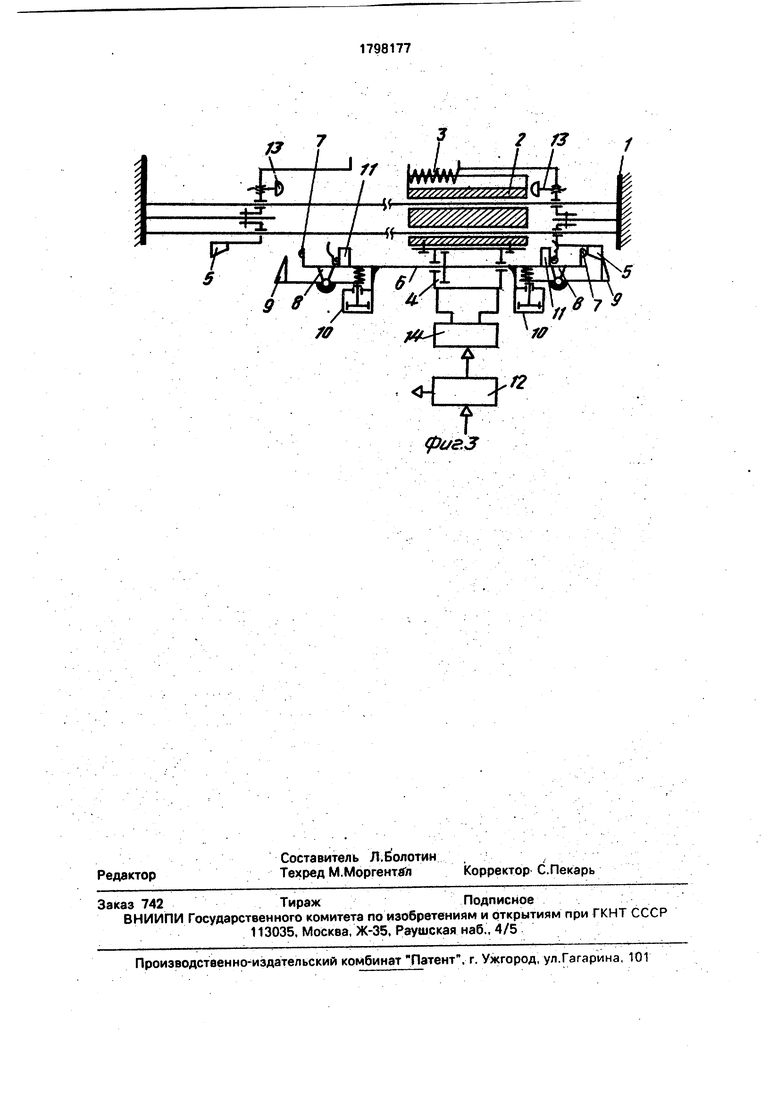
На фиг. 1 изображена конструкция модуля с приводом подвижного звена, установленном на подвижном звене, с зацепом на выходном звене привода и собачкой на ос5 новании; на фйг.2 - конструкция модуля с приводом, установленном наг основании; на фиг.З - конструкция модуля с прйбодом на подвижном звене, с зацепом на основании и собачкой на выходном звене при вЪда.
0 Модуль манипулятора (фиг.1) содержит основание 1, подвижное звено 2, взаимодействующее с упругим элементом 3 аккумулятора механической энергий, привод 4 перемещения подвижного звена 2 и управ5 ляемые фиксаторы его (звена) положения, состоящие из двух частей, одна из которых выполнена в виде зацепа 5 и связана с выходом 6 привода 4 перемещения подвижного звена. Кроме этого,. модуль снабжен
0 дополнительным упором 7. установленным на корпусе 8 другой части фиксатора, выполненной в виде собачки 9 с приводом 10. При этом упор 7 установлен с возможностью взаимодействия с выходом 6 привода 4.
5 Модуль также снабжен датчиком 11 фиксации в механизме фиксаторов выхода б (зацепа 5) и управляемым элементом 12 отключения энергоподвода к приводу А перед . взаимодействием его выхода 6 с дополни0 тельным упором 7 и включения энергоподвода к приводу 4 по сигналам датчика 11 фиксации. Обязательно, чтобы привод 4 подвижного звена 2 был выполнен несамотормозящим. Естественно также, что модуль
5 имеет упор 13 точки позиционирования и управляемый элемент 14 реверса движения выхода привода.
Заметим, что в варианте выполнения предлагаемой схемы модуля на базе пнев- мопривода, управляемые элементы: 12 (отключения энергоподвода к приводу 4) и 14 (реверса движения выходного звена привода) могут быть реализованы на базе стандартных элементов пневмоавтоматики.
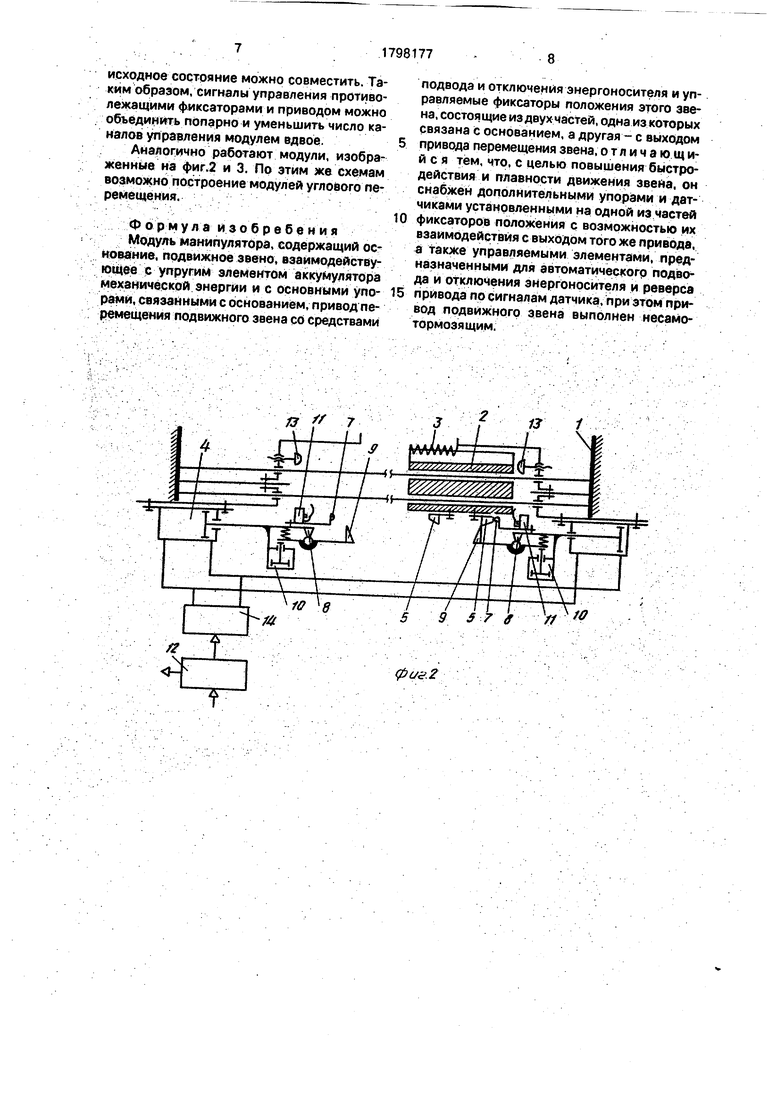
На фиг.2 показан модуль, аналогичный рассмотренному, но отличающийся тем, что привод подвижного звена и собачка установлены на основании 1, а зацеп 5 закреплен на подвижном звене 2.
Конструктивно зацеп 5 и собачку 7с приводом 10 ее перемещения можно поменять местами (фиг.З).
Рассмотрим работу предлагаемого устройства на примере модуля, изображенного на фиг. 1.
В положении, показанном на чертеже, подвижное звено находится в правой (по фиг. 1) позиции. Привод 4 прижимает подвижное звено 2 к упору 13 посредством собачки 7 и зацепа 5. При этом правый упругий элемент 3 аккумулятора находится в Сжатом состоянии, благодаря чему система обладает запасом потенциальной энергии. Команда на выполнение движения поступает на привод 10 собачки, которая освобождает подвижное звено 2 и оно, под действием усилия упругого элемента 3 начинает разгоняться, переводя потенциальную энергию упругого элемента в кинематическую энергию подвижного звена.
После прохождения свободного участка пути (когда упругий элемент не взаимодействуете подвижным звеном) левый упругий элемент 3 начинает взаимодействовать с подвижным звеном, которое начинает тормозиться за счет перехода кинетической энергии в потенциальную энергию упругого элемента. Если бы в системе не было потерь энергии на преодоление сил трения, то подвижное звено достигло, бы левой позиции, при этом скорость звена стала бы равной нулю, а деформация упругого элемента достигла бы такой же величины, какой была в правой позиции, Наличие в системе сил трения обуславливает необходимость установки привода, восполняющего потери энергии на преодоление этих сил. Привод, который используется в данном модуле, не работает на восполнение потерь на трение в течение всего перемещения подвижного звена, а используется для дополнительной деформации упругого элемента в конце хода подвижного звена.
Реализуется это следующим образом. Практически сразу за подачей команды на освобождение подвижного звена 2 правым фиксатором, на элемент 12 подается команда отключения энергоподвода к приводу 4. В период времени между командами управления на освобождение звена 2 правым
фиксатором и отключение энергоподвода к приводу 4, под действием энергоносителя (например, в варианте использования пнев- мопривода - сжатого воздуха) привод 4 пе- 5 ремещает свой выход 6 вместе с зацепом 5 влево - в сторону направления движения подвижного звена.
Далее по мере движения подвижного звена выход 6, а точнее связанный с ним
0 зацеп 5 вступает во взаимодействие с левой собачкой 9, датчиком 11 и дополнительным упором 7. При этом подвижное звено продолжает двигаться по инерции влево, выход 6 относительно корпуса привода на5 чинает двигаться вправо (в силу того, что привод несамотормозящий). В то же время по сигналу датчика 11 {посредством элементов реверса движения 14 и энергоподвода 12) привод 4 начинает подтягивать подвиж0 ное звено 2 до позиции, определяемой положением левого упора 13, дополнительно деформируя при этом упругий элемент 3 и восполняя тем самым потерю энергии. Заметим, что благодаря совпадению по
5 направлению и во времени двух движений - одного - движения выхода 6 привода 4 под действием сил инерции и второго - движения выхода 6 под действием энергоносителя, достигается отсутствие п ромежуточ ной
Q остановки подвижного звена 2 в момент фиксации и обеспечивается плавность его движений. При этом, т.к. дополнительный упор 7 не определяет точку позиционирования подвижного звена, но может влиять на
5 динамику движений, указанный упор 7 и взаимодействующую с ним поверхность зацепа 5 целесообразно выполнить таким образом, чтобы при их взаимодействии отсутствовал жесткий удар (например, кон0 такт может осуществляться через полиуре- тановый элемент).
Потери энергии на трение для каждого модуля в силу разных причин не являются постоянной величиной, поэтому перемеще5 ние выхода 6 и зацепа 5 фиксатора навстречу дополнительному упору 7 должно осуществляться в запасом, чтобы при подкачке всегда была возможность полностью компенсировать потери энергии на трение
0 и дотянуть подвижное звено до упора точки позиционирования:
Команды на освобождение подвижного звена и отключение энергоподвода к приводу 4 целесообразно подавать с небольшим
5 разрывом по времени, достаточным, чтобы выход 6 привода переместился до упора в направлении предстоящего перемещения. Команду на дотягивание подвижного звена 2 до упора 13 (по сигналам датчика 11) и приведение противолежащего фиксатора в
исходное состояние можно совместить. Таким образом, сигналы управления противолежащими фиксаторами и приводом можно объединить попарно и уменьшить число каналов управления модулем вдвое.
Аналогично работают модули, изобраг женные на фиг.2 и 3. По этим же схемам возможно построение модулей углового перемещения.:
формулаизобребения Модуль манипулятора, содержащий основание, подвижное звено, взаимодействующее с упругим элементом аккумулятора механической энергии и с основными упорами, связанными с основанием, привод перемещения подвижного звена со средствами
0
подвода и отключения энергоносителя и управляемые фиксаторы положения этого эвена, состоящие из двух частей, одна из которых связана с основанием, а другая - с выходом привода перемещения звена, отличэющи- й с я тем, что, с целью повышения быстродействия и плавности движения звена, он снабжен дополнительными упорами и датчиками установленными на одной из частей фиксаторов положения с возможностью их взаимодействия с выходом того же привода, а также управляемыми элементами, предназначенными для автоматического подвода и отключения энергоносителя и реверса привода по сигналам датчика, при этом привод подвижного звена выполнен несамо- тормозящим.
| Авторское свидетельство СССР | |||
| Модуль манипулятора | 1987 |
|
SU1466934A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
