Иэобретение относится к станкостроению, в частности к узлам манипуляторов и роботов.
Целью изобретения является расширение технологических возможностей.
На чертеже представлена принципиальная схема кисти манипулятора.
На приводном звене 1 манипулятора установлена кисть манипулятора и механизм изменения его положения относительно приводного звена.
Механизм изменения положения кисти манипулятора относительного приводного эвена представляет из себя шарнирно установленные через равный угловой шаг силовые цилиндры 2-5 соответственно со шток-поршнями 6-9.
Кисть манипулятора состоит из установленного на приводном эвене 1 с помощью основного шарнирного соединения 10 стержня 11, ведущего звена 12. ведомого звена 13 и установленного на стержне 11 с помощью дополнительного шарнирного соединения 14 рабочего органа 15. При этом ведущее звено 12 жестко соединено с относящейся к стержню 11 частью основного шарнирного соединения 10, а ведомое звено 13с относящейся к рабочему органу 15 частью дополнительного шарнирного соединения 14. Ведущее 12 и ведомое 13 звенья соединены между собой посредством предварительно напряженных гибких связей 16.
Свободные концы шток-поршня 6-9 силовых цилиндров шарнирно связаны с ведущим звеном 12 либо непосредственно либо через гибкие связи 17.
Ведущее 12 и ведомое 13 звенья могут быть выполнены в виде плоских тарелок, а все шарниры и шарнирные соединения выполнены сферическими.
Кисть манипулятора работает следующим образом.
Рабочая жидкость в полости силового цилиндра подается согласованно. Для пово1 рота тарелок в заданное положение, например, вокруг оси Х-Х в силовой цилиндр 3
ё
О 1 00
4 CJ О
подается рабочая жидкость под давлением в полость А, шток-поршень 7 силового цилиндра втягивается и поворачивает ведущее звено 12 в увлекаемую сторону, одновременно в силовой цилиндр 5 попадается рабочая жидкость в полость В. При этом шток-поршень 9 силового цилиндра выдвигается и обеспечивает беспрепятственный поворот ведущего звена 12, которое синхронно поворачивает и ведомое звено 13 в ту же сторону посредством гибких связей 16, а следовательно, и рабочий орган 15. Поворот в обратную сторону относительно оси Х-Х производится в обратной последовательности.
Поворот ведущего звена 12 относительно оси Y-Y обеспечивается силовыми цилиндрами 2 и 4 аналогично. При этом штоки нерабочих цилиндров находятся в среднем положении.
При поврррте ведущего звена относительно оси 0-0 и перпендикулярной ей оси силовые цилиндры работают аналогично, но попарно, т.е. штоки цилиндров, расположен Т
ных под углом ъ друг к другу, или втягиваются или выдвигаются параллельно.
Для задания рабочему органу траектории окружности работа цилиндров происходит следующим образом. Шток-поршень 7 силового цилиндра 3 выдвигается, а шток- поршень 9 силового цилиндра 5 втягивается, происходит поворот ведущего звена 12 относительно оси Х-Х и фиксируется в этом положении. Затем втягивается шток-поршень 6 гидроцилиндра 2 и соответственно выдвигается шток-поршень 8 противолежащего силового цилиндра 4 и также фиксируется в этом положении. Далее фиксация шток-поршней 7 и 9 цилиндров 3 и 5 прекращается и происходит движение этих штоков в обратную сторону до других крайних положений и вновь фиксируется до тех пор, пока в работу не вступят шток-поршни 6 и 8 цилиндров 2 и 4, а ведущее звено 12 совершит за это время сложное движение.
Таким образом попеременная, попарная работа и фиксация шток-поршня 6,8 и 7,9 задает ведущему звену 12 сложное движение (восьмерки), которое посредством гибких связей 16 передается к ведомому звену 13 с рабочим органом 15, описывающему в течение этой работы траекторию окружности.
Таким же образом, но в другом режиме работы силовых цилиндров, а также изменяя
размеры ведущего и ведомого звеньев и их форму и места крепления гибких связей к ним, можно придать движению рабочего органа различные траектории в пространстве. Использование в конструкции гибких
предварительно напряженных связей позволяет получить беззазорную конструкцию, что наряду с использованием силовых цилиндров дает как возможность позиционирования в пространстве, так и точность
этого позиционирования. Конструкция отличается простотой и низкой металлоемкостью, позволяет передавать движение на большие расстояния и описывать рабочему органу любые траектории в пространстве.
Формула изобретения
1.Кисть манипулятора, содержащая соединенный с приводным звеном посредством шарнирного соединения стержень с рабочим органом, предварительно напряженные
гибкие связи и механизм изменения положения рабочего органа относительно приводного звена, отличающаяся тем, что, с целью расширения технологических возможностей за счет обеспечения поворота
кисти относительно двух осей, она снабжена связанными между собой посредством предварительно напряженных гибких связей ведущим и ведомым звеньями, а в стержне выполнено дополнительное шарнирное
соединение, размещенное между рабочим органом и основным шарнирным соединением, причем ведущее звено жестко соединено с относящейся к стержню частью основного шарнирного соединения, ведомое звено - с
относящейся к рабочему органу частью дополнительного шарнирного соединения, а механизм изменения положения рабочего органа выполнен в виде шарнирно установленных на приводном звене силовых цилиндров, свободные концы штоков которых связаны с ведущим звеном, при этом все шарнирные соединения выполнены сферическими.
2.Кисть по п.1,отл имеющаяся тем, что ведущее и ведомое звенья выполнены в
виде плоских тарелок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОДНАЯ НАСОСНАЯ УСТАНОВКА | 2002 |
|
RU2213259C1 |
| Манипулятор | 1979 |
|
SU856788A1 |
| Копирующий манипулятор | 1979 |
|
SU854706A1 |
| ПОРШНЕВАЯ МАШИНА | 1993 |
|
RU2093704C1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1036525A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Устройство для кантования изделий | 1986 |
|
SU1384483A1 |
| Манипулятор | 1984 |
|
SU1298070A1 |
| Манипулятор | 1980 |
|
SU919804A1 |
| СНАРЯД ДЛЯ ПОРАЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2735634C2 |
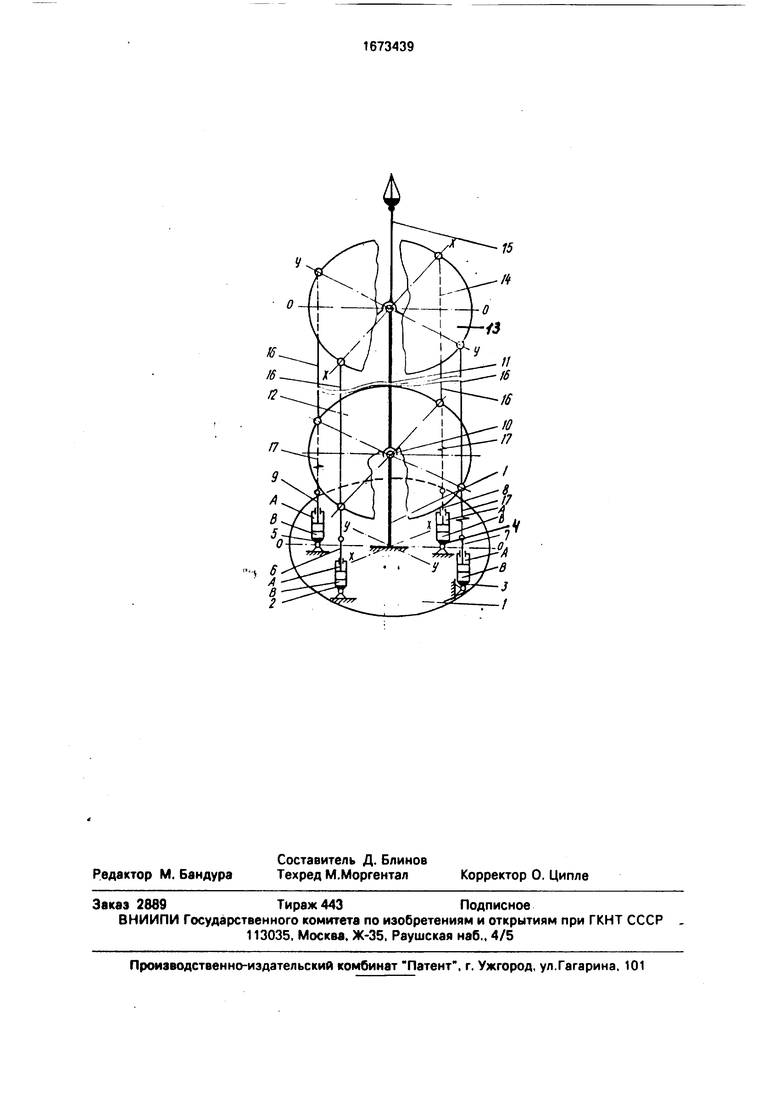
Изобретение относится к станкостроению и может быть использовано в конструкциях узлов манипуляторов. Цель - расширение технологических возможностей за счет обеспечения поворота кисти относительно двух осей. Кисть манипулятора, состоящая из стержня 11 с рабочим органом 15 и соединенных между собой посредством предварительно напряженных гибких связей 16 ведущего 12 и ведомого 13 звеньев, шарнирно установлена на приводном звене 1 манипулятора. Механизм изменения положения рабочего органа относительно приводного звена состоит из шарнирно установленных на приводном звене 1 силовых цилиндров 2, 3, 4, 5 соответственно со шток-поршнями 6, 7, 8, 9, свободные концы которых либо непосредственно, либо через гибкие связи 17 соединены с ведущим звеном 12. 1 з.п. ф-лы, 1 ил.
