Изобретение относится к строительному машиностроению, в частности к отделочным манипуляторам и агрегатам, и может быть использовано в строительстве для механизации и автоматизации работ.
Цель изобретения - повышение точ.нэс- ти за счет снижения динамических нагрузок.
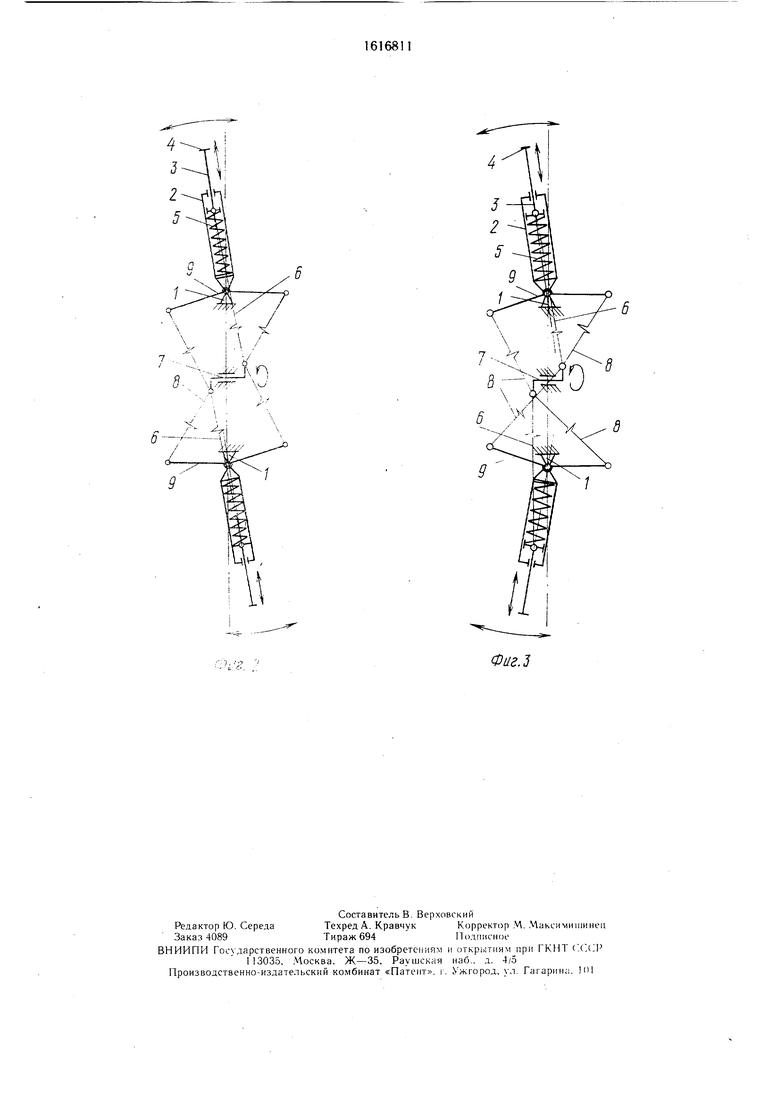
На фиг. 1 схематично изображен предлагаемый манипулятор с одним исполнительным устройством; на фиг. 2 - то же с двумя исполнительными устройствами; на фиг. 3 - то же, с перекрестным соединением упругих звеньев.
Манипулятор содержит основание 1 и исполнительные устройства. Каждое из них имеет подвижное звено 2, внутри которого установлена выдвижная штанга 3, несуя1ая рабочий орган, например форсунку 4. Штанга 3 упругим элементом - пружиной 5 поджата к основанию подвижного звена 2. На конце штанги 3 закреплено упругое звено 6 (например трос), связанное шарнирно с кривошипом 7 привода. Упругие звенья 8 шарнирно связывают концы кривошипа 7 с соответствующими концами ведомых элементов 9 подвижных звеньев (например двуплечий рычаг). Каждый ведомый элемент 9 жестко закреплен с соответствующим подвижным звеном 2 исполнительного устройства.
Манипулятор работает следующим обра- зо м.
В исходном вертикалоНОМ иоложеник исполнительных устройстз прухинь 5 внутри звеньев 2 находятся в среднем положении и штанги 3 находятся также Е среднем положении. При вращении кривошипа 7 привода одно из основных упругих звеньев 8 каждой пары увлекает за собой конец ведомого ;ле- мента 9 с жестко закрепленным на нем зве- ном 2. Одновременно дополнительное упругое звено 6, связанное с кривошипом 7, постепенно сжимает пружину 5 и втягивает штангу 3, обеспечивая перемещение форсунок 4 вдоль обрабатываемой поверхности.
Затем происходит колебание исполнительных устройств в обратную сторону, а угругое звено б разжимает пружкну 5, обеспечивая перемещение ;г1та.чг 3 в прот :1 и,юлож- ные мЕпранления.
С целью уменьше1п1Я лиг:амит(к н рузок в конструк;,ии манипулятора один из пар основных упругих звеньев соединяет концы KpHBO jjHna с ведо.мымм элементами перекрестно, что обеспечивает .встречные колебания (фиг. 3), гасящие колебания конструкции.
1.Манипулятсф, содерж.:; 1;,н; ос 1ованке, исполнительные устройстнч ;--яж/ г и: (- psix имеет подзя/кжя r.-i. с : ..:нск:-;.. на нем направлякяи :, ;; и г -;;Д; ;; к; ,;; lii raH- у. ;-: кематичес:чИ / О ; . звеном с гю ;|ць- : .:i; yvO ;-. -,:.-.,.: &; же привод, li::. K);-Li:M K;;H , : : . i- установлехньк-на Gcn.uij;:) ;.:: связанные с j.i;,TB.r,:i;:. v/ - . - ;: - стзующих испо ;:.. ;;i.;,
М01дью основных yi;p:- ;. ,, щийся ем что, о ие.ък.- ,.:i;:.. ; .ч мости за счгт снижспит ;;ьна 1;ьч;;Сга;х .;;;- rpV30K. fit снабжс) ;м :илк;ггельиыл:; уппуГИМИ ЗBeнЬЯ, 4KC. i() KOTv. OhiX ПйВНО ЧЯС. У ИСГЮЛНИТе.;и;Ч; л уСТрОЙГТЯ, Jlp v v--.i О.ЧНИ
цы этих Д(кгг- и сльн:,;х угфугмх :;вень--Б шар нипио :1икп п ;e:;i: На ь;1, п. : ин- гах СОО1 ьо нтьук :ii:;H кс1К ,.пьн yc i ройств, а другие кинРмати- ески связаны с соответстз Ю ДЯ.и криво и и па ми ггь иводс;.
2., V iift r-.ip по г;. ;. г)гл -1чс:: ицийся тем, чт(; подвижнее зв1-ч 0 каждогг и -пол- нитольного Устройств соеди-fOiH; с .ciio ванием гюсредст ол rii-.c:v;;a- -;-- v : и -,. .. тичегкой парЬ,
3. МаИИПуЛЯТО по : , .: : -:::
те.м, что подви) , i ::о... и- тельного устройства сосдиг.гно с с помощью вп;а цатель;1ой кинечат пары.
О. U- TT V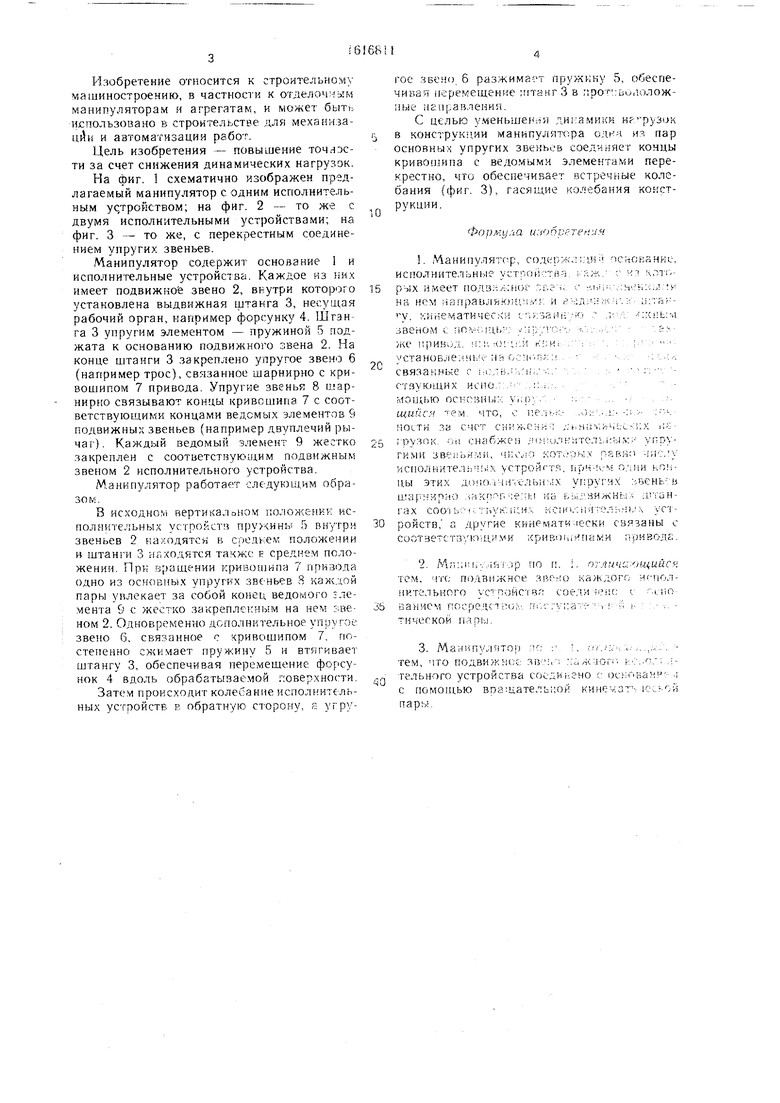
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1537513A1 |
| Манипулятор | 1987 |
|
SU1521588A1 |
| Мотовило к уборочным машинам | 1990 |
|
SU1802997A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| НАПЛАВНОЙ МОСТ | 2015 |
|
RU2604043C1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Манипулятор | 1985 |
|
SU1242349A1 |
| ПРИВОД К ДВУХНОЖЕВОМУ РЕЖУЩЕМУ АППАРАТУ | 1991 |
|
RU2009631C1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1414620A1 |
Изобретение относится к области строительного машиностроения, в частности, к отделочным манипуляторам, и может быть использовано для механизации работ в строительстве. Цель изобретения - повышение точности за счет снижения динамических нагрузок. Манипулятор содержит основание 1 и исполнительные устройства, каждое из которых имеет подвижное звено 2 и выдвижную штангу 3. В исходном положении упругие элементы 5, расположенные внутри подвижных звеньев 2, находятся в среднем положении. При вращении кривошипов 7 привода одно из основных упругих звеньев 8, кинематически связывающих этот кривошип со звеном 2, увлекает за собой подвижное звено. Одновременно дополнительные упругие звенья 6, одни концы которых шарнирно закреплены на соответствующих выдвижных штангах 3, а вторые кинематически связаны с соответствующими кривошипами, постепенно сжимают упругие элементы 5, обеспечивая продольное перемещение штанг 3. Затем происходит перемещение исполнительных устройств в обратную сторону. Подвижные звенья 2 каждого исполнительного устройства могут быть связаны с основанием с помощью вращательных и поступательных кинематических пар. 2 з.п. ф-лы, 3 ил.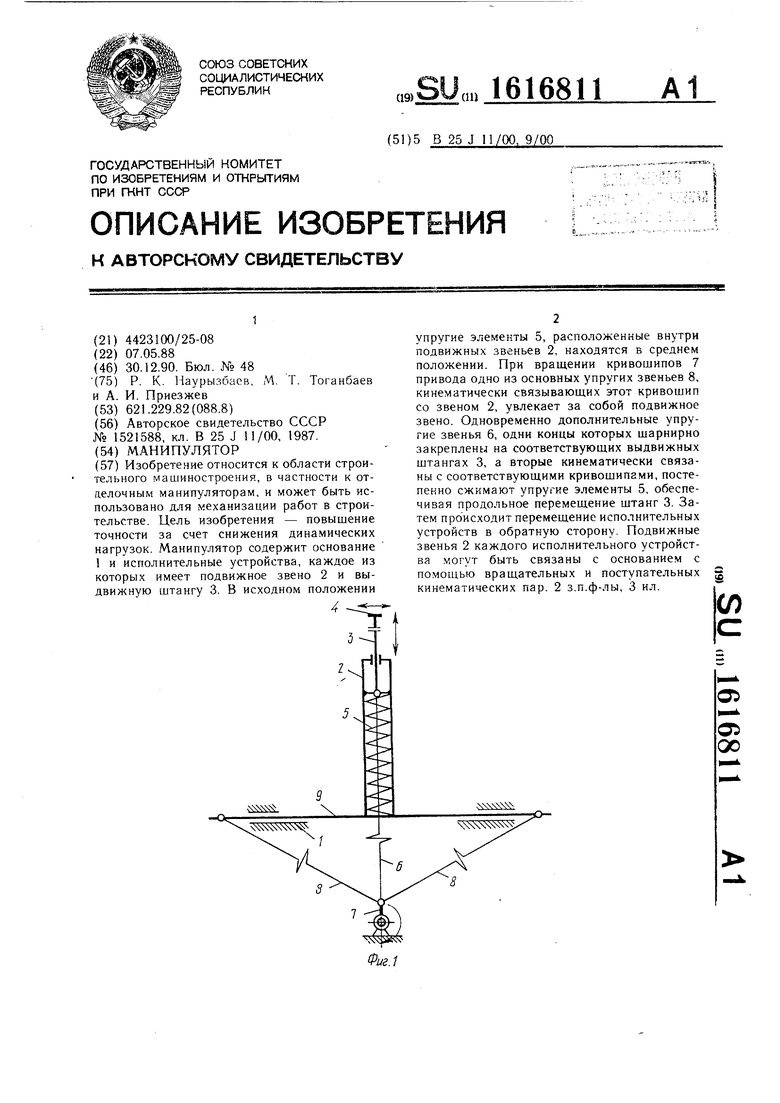
| Манипулятор | 1987 |
|
SU1521588A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
