Изобретение относится к автотракторостроению, в частности, к электропневматическим тормозным системам транспортных средств.
Цель изобретения - снижение расхода электроэнергии.
На фиг. 1 представлена схема электропневматического тормозного привода; на фиг. 2 - модулятор давления; на фиг. 3 - структурная схема электронного блока управления; на фиг. 4 - иллюстрация алгоритма управления процессом торможения.
Электропневматический тормозной привод колеса транспортного средства содержит тормозную педаль 1, кинематически связанную с датчиком 2 управления торможением, который линиями связи соединен с электронным блоком 3 управления. К электронному блоку 3 также подключены датчик 4 угловой скорости колеса транспортного средства, пневмоэлектрический датчик 5 давления и шаговый электродвигатель 6 управления модулятором Удавления. Последний соединен пневмомагистралями 8,9 и 10 соответственно с ресивером 11, тормозной камерой 12 и краном управления (не показан), запасной тормозной системы.
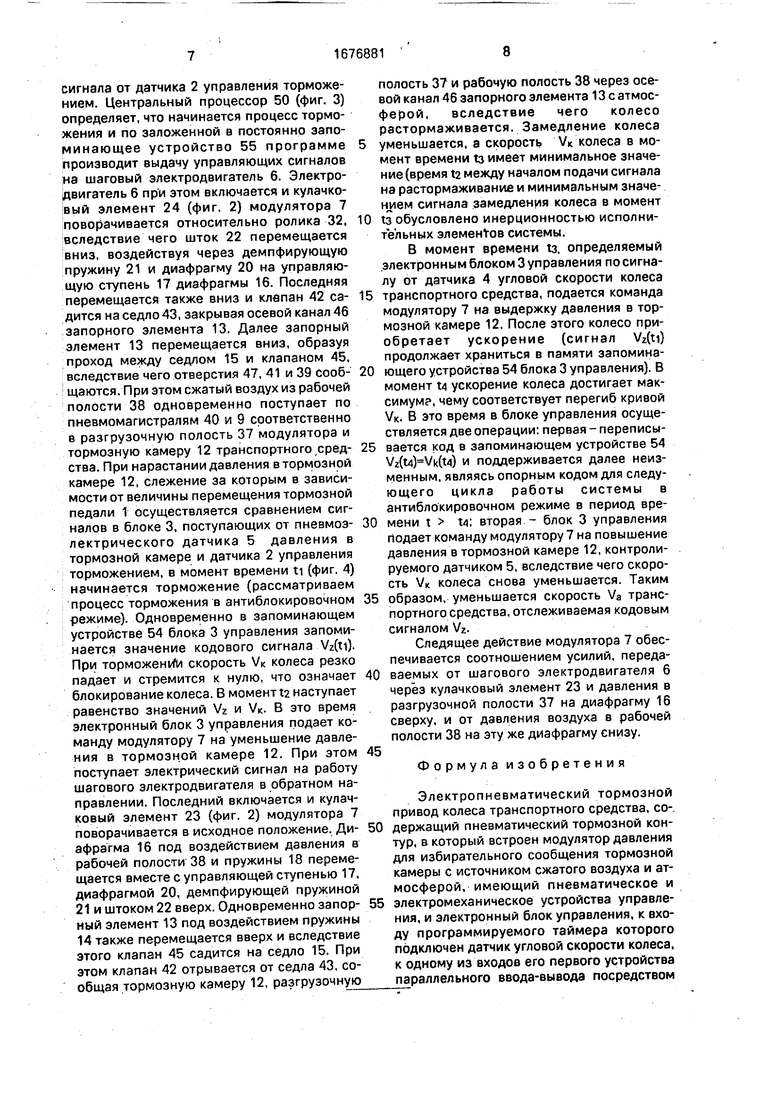
Модулятор 7 давления содержит запорный элемент 13 (фиг. 2), поджатый пружиной 14 относительно седла 15 и диафрагмы 16. Диафрагма 16 вместе с управляющей ступенью 17 подпружинена пружиной 18 относительно перегородки 19 и диафрагмы 20. Диафрагма 20 подпружинена демпфирующей пружиной 21 через шток 22 относительно кулачкового элемента 23, ось 24 которого кинематически связана через механический редуктор (на фиг. 2 не показан) с валом шагового электродвигателя 6, соединенного линиями связи с электронным блоком 3.
Корпус 25 модулятора 7 с крышками 26 и 27 разделен перегородками 28, 19 и 29 на четыре камеры.
В первой камере 30, образованной верхней крышкой 26 и перегородкой 28, установлен жестко на оси 24 кулачковый элемент 23. Ось 24 кулачкового элемента кинематически связана через механический редуктор с валом шагового электродвигателя 6, установленного в боковой стенке корпуса 25. В осевом отверстии перегородки 28 находится шток 22, в верхней части которого свободно на оси 31 установлен ролик 32.
Во второй камере, образованной перегородками 19 и 28, установлена диафрагма 20, разделяющая указанную камеру на верхнюю 33 и нижнюю 34 полости. В верхней полости 33 на диафрагме 20 свободно установлена демпфирующая пружина 21. подпружинивающая шток 22 относительно
кулачкового элемента 23 и перегородки 28. Полость 33 через боковое отверстие 35 в корпусе 25 и пневмомагистраль 10 сообщена с тормозным краном (не показан) запасной тормозной системы. В нижней полости 34 находится верхняя часть управляющей ступени 17, свободно установленной в осевом отверстии перегородки 19. Полость 34 через отверстие 36 сообщена с атмосферой.
0
В третьей камере, образованной перегородками 19 и 29, установлена диафрагма 16, разделяющая указанную камеру на разгрузочную 37 и рабочую 38 полости. В раз5 грузочной полости 37 находится нижняя часть управляющей ступени 17, жестко соединенная с диафрагмой 16. Полость 37 через отверстие 39, пневмомагистраль 40 и отверстие 41 соединена с рабочей полостью
0 38 и пневмомагистралью 9, сообщенной с тормозной камерой 12. В рабочей полости 38 установлена пружина 18, подпружинивающая диафрагму 16 вместе с управляющей ступенью 17 относительно перегородки 19 и
5 диафрагмы 20. На нижней части диафрагмы 16 установлен клапан 42. седло 43 которого выполнено в верхней части запорного элемента 13. Полость 38 через боковое отверстие 41 в корпусе 25 и пневмомагистраль 9
0 сообщена с тормозной камерой 12.
В четвертой камере 44, образованной нижней крышкой 27 корпуса и перегородкой 29. установлен запорный элемент 13 с клапаном 45 и осевым каналом 46, сообща5 ющим полости 37, 38, а также тормозную камеру 12 с атмосферой. Запорный элемент 13 подпружинен пружиной 14 относительно седла 15, выполненного в осевом отверстии перегородки 29, Камера 44 через отверстие
0 47 и пневмомагистраль 8 сообщена с ресивером 11,
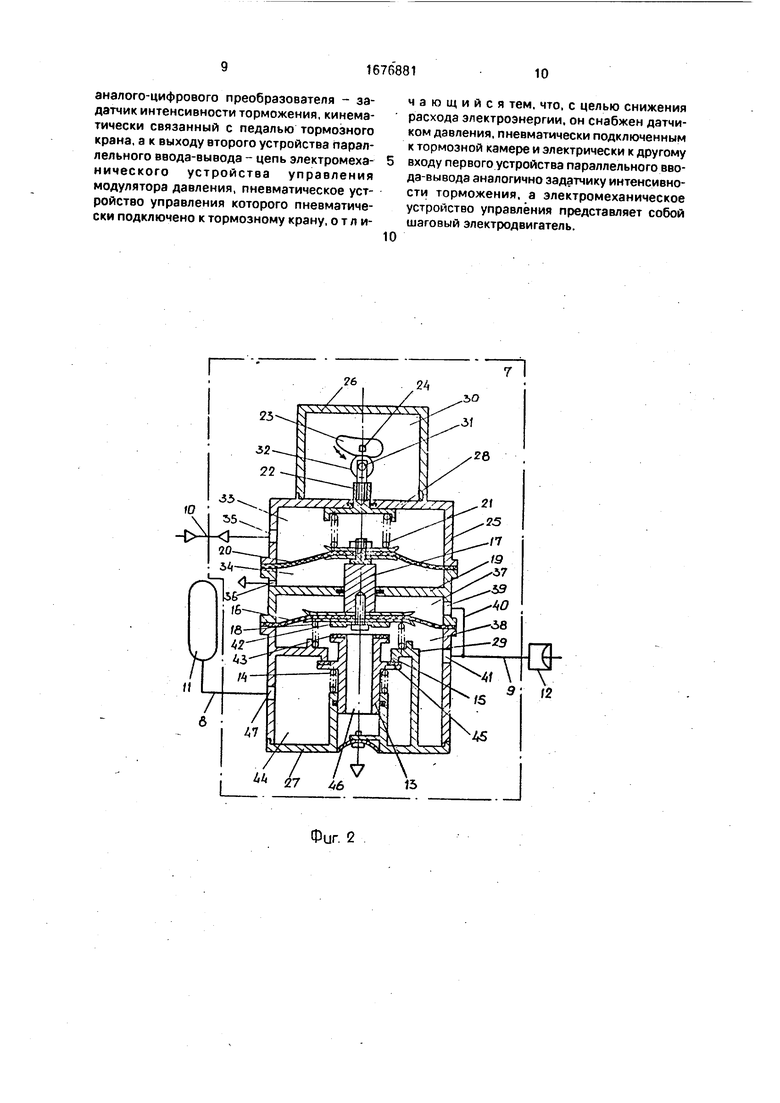
Электронный блок 3 управления содержит тактовый генератор 48 (фиг. 3), являющийся задатчиком тактовой частоты для
5 работы центрального процессора; системный контроллер 49, обеспечивающий выдачу управляющих сигналов; центральный процессор 50, предназначенный для управления прохождением программы алгорит0 ма, обменом и обработкой информации; буфер 51 адресного интерфейса, усиливающий адресные сигналы; интерфейсный буфер 52 данных, обеспечивающий обмен данными между устройствами; адресный се5 лектор 53, обеспечивающий выбор и доступ управляющих сигналов и данных к необходимым устройствам; оперативное запоминающее устройство 54, предназначенное для хранения оперативной информации; постоянное запоминающее устройство 55,
обеспечивающее хранение программы алгоритма и таблиц переменных параметров; контроллер 56 прерываний, обеспечивающий прием информации с минимальными потерями времени, программируемый таймер 57. предназначенный для преобразования частотной информации в цифровой код; устройства 58 и 59 параллельного ввода-вывода, обеспечивающие обмен информацией с внешними устройствами; буферы 60, 61 и 62 данных ввода-вывода; формирователь 63 входного сигнала от частотного датчика 5; аналого-цифровые преобразователи 64 и 65, предназначенные для преобразования сигналов от датчика 2 управления торможением и датчика 5 давления в цифровой код; буферы 66-70 данных ввода-вывода, обеспечивающие усиление входных и выходных сигналов; блок 71 усилителей для усиления управляющих сигналов, подаваемых на шаговый электродвигатель.
Функциональное соединение составных элементов электронного блока 3 выполнено по следующей схеме (фиг. 3). Вход тактового генератора 48 соединен с выходом системного контроллера 49, а выход связан с входом центрального процессора
50и входом системного контроллера 49. Выход центрального процессора 50 связан линиями связи с входом буфера 51 адресного интерфейса. Центральный процессор 50 двухнаправленными линиями связи соединен с системным контроллером 49 и интерфейсным буфером 52 данных. Вход буфера
51адресного интерфейса соединен с системным контроллером 49. а выход подключен к входам адресного селектора 53, оперативного запоминающего устройства 54. постоянного запоминающего устройства 55, контроллера 56 прерываний, программируемого таймера 57 и устройств 58 и 59 ввода-вывода. Вход интерфейсного буфера 52 данных связан с выходом системного контроллера 49 и двухнаправленными линиями связи соединен с буферами 60, 61 .и 62 данных ввода-вывода информации. Вход адресного селектора 53 соединен с выходом системного контроллера 49, а выход связан с входами буферов 60, 61 и 62 данных ввода-вывода, контроллера 56 прерываний, программируемого таймера 57 и устройств 58 и 59 ввода-вывода. Вход постоянного запоминающего устройства 55 соединен с выходом системного контроллера 49. а выход - с входом буфера 62 данных. Выход системного контроллера 49 соединен с входами контроллера 56 прерываний, программируемого таймера 57 и устройств 58 и 59 параллельного ввода-вывода информации. Вход программируемого таймера 57
соединен с выходом формирователя 63 входного сигнала, который своим входом связан с выходом датчика 4 угловой скорости колеса транспортного средства. Выход
программируемого таймера 57 соединен с входом контроллера 56 прерываний. Выходы датчиков 2 и 5 соединены соответственно с входами аналого-цифровых преобразователей 64 и 65, которые через
буферы 66, 67 соединены с входами устройства 58 ввода-вывода, а выходы этого устройства через буферы 68 и 69 соединены с входами управления аналого-цифровых преобразователей 64 и 65. Выход устройства 59 ввода-вывода через буфер 70 данных связан с входом блока 71 усилителей, выход которого соединен с шаговым электродвигателем 6.
В статическом положении (когда электропневматическая тормозная система не включается в работу) электрический сигнал от электронного блока 3 не поступает к шаговому электродвигателю 6 управления модулятором 7 давления. Тормозная камера 12
транспортного средства через пневмомаги- страль 9 и модулятор 7 сообщена с атмосферой. Полость 33 модулятора 7, связанная через пневмомагистраль 10с краном управления запасной тормозной системой, также
сообщена с атмосферой.
Электропневматическая тормозная система транспортного средства работает следующим образом.
При движении транспортного средства
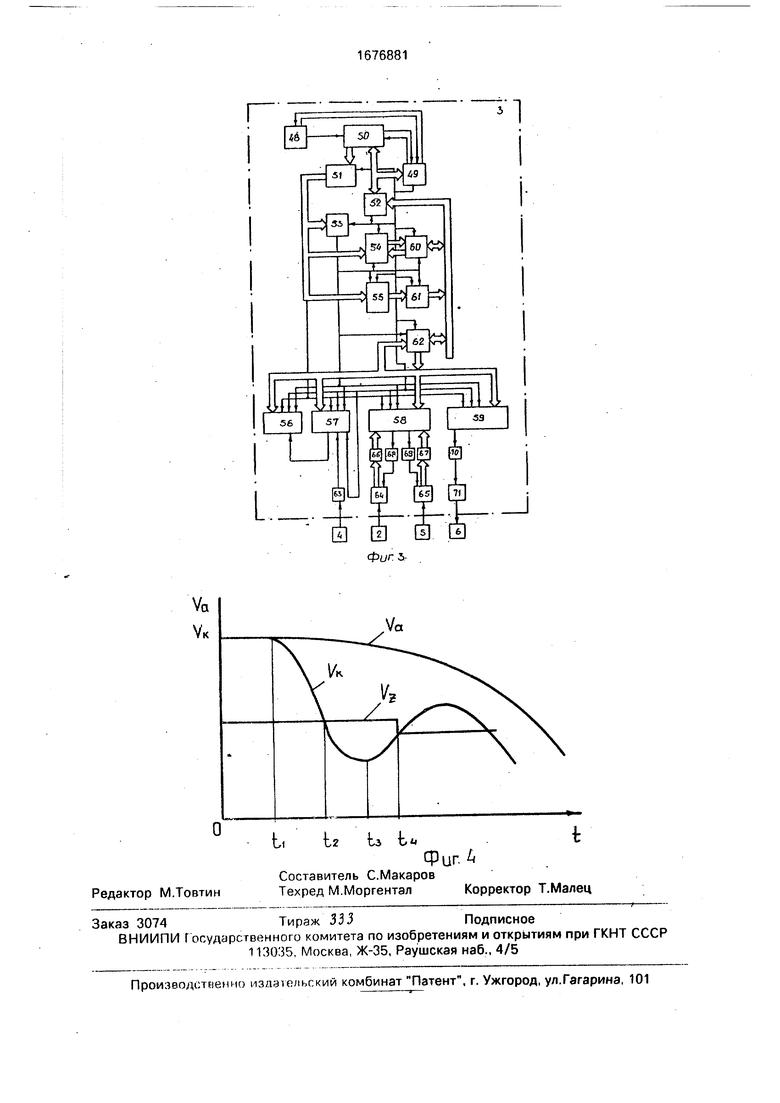
без торможения в канале программируемого таймера 57 (фиг. 3) электронного блока 3 постоянно формируется цифровой код, пропорциональный скорости вращения VK колеса, полученный из частотного сигнала от
датчика 4. Этот код постоянно обновляется в ячейке оперативного запоминающего устройства 54. Одновременно центральным процессором 50формируется цифровой код Vz, соответствующий приблизительно 0,5
VK, который также хранится в этом же устройстве 54. Таким образом при отсутствии торможения электронный блок 3 управления работает в режиме слежения за параметром VK, т.е. в период времени О-ti (фиг.
4) изменение A Vz пропорционально AVK. Одновременно производится слежение центральным процессором 50 за положением тормозной педали 1 по сигналу от датчика 2 управления торможением. Сигнал от этого
датчика 2 в аналого-цифровом преобразователе 64 преобразуется в цифровой код и через устройство 58 ввода-вывода подается в центральный процессор 50 для обработки.
При воздействии водителя на тормозную педаль 1 (фиг. 1) происходит изменение
сигнала от датчика 2 управления торможением. Центральный процессор 50 (фиг. 3) определяет, что начинается процесс торможения и по заложенной в постоянно запоминающее устройство 55 программе производит выдачу управляющих сигналов на шаговый электродвигатель 6. Электродвигатель 6 пр и этом включается и кулачковый элемент 24 (фиг, 2) модулятора 7 поворачивается относительно ролика 32, вследствие чего шток 22 перемещается вниз, воздействуя через демпфирующую пружину 21 и диафрагму 20 на управляющую ступень 17 диафрагмы 16. Последняя перемещается также вниз и клепан 42 садится на седло 43, закрывая осевой канал 46 запорного элемента 13. Далее запорный элемент 13 перемещается вниз, образуя проход между седлом 15 и клапаном 45, вследствие чего отверстия 47, 41 и 39 сообщаются. При этом сжатый воздух из рабочей полости 38 одновременно поступает по пневмомагистралям 40 и 9 соответственно в разгрузочную полость 37 модулятора и тормозную камеру 12 транспортного средства. При нарастании давления в тормозной камере 12, слежение за которым в зависимости от величины перемещения тормозной педали 1 осуществляется сравнением сигналов в блоке 3, поступающих от пневмоэ- лектрического датчика 5 давления в тормозной камере и датчика 2 управления торможением, в момент времени ti (фиг. 4) начинается торможение (рассматриваем процесс торможения в антиблокировочном режиме). Одновременно в запоминающем устройстве 54 блока 3 управления запоминается значение кодового сигнала Vz(ti). При торможений скорость VK колеса резко падает и стремится к нулю, что означает блокирование колеса. В момент t2 наступает равенство значений Vz и VK. В это время электронный блок 3 управления подает команду модулятору 7 на уменьшение давления в тормозной камере 12. При этом поступает электрический сигнал на работу шагового электродвигателя в обратном направлении. Последний включается и кулачковый элемент 23 (фиг. 2) модулятора 7 поворачивается в исходное положение. Диафрагма 16 под воздействием давления в рабочей полости 38 и пружины 18 перемещается вместе с управляющей ступенью 17, диафрагмой 20, демпфирующей пружиной 21 и штоком 22 вверх. Одновременно запорный элемент 13 под воздействием пружины 14 также перемещается вверх и вследствие этого клапан 45 садится на седло 15. При этом клапан 42 отрывается от седла 43, сообщая тормозную камеру 12, разгрузочную
полость 37 и рабочую полость 38 через осевой канал 46 запорного элемента 13с атмосферой, вследствие чего колесо растормаживается. Замедление колеса
уменьшается, а скорость VK колеса в момент времени ts имеет минимальное значение (время t2 между началом подачи сигнала на растормаживание и минимальным значением сигнала замедления колеса в момент
t3 обусловлено инерционностью исполнительных элементов системы.
В момент времени гз. определяемый электронным блоком 3 управления по сигналу от датчика 4 угловой скорости колеса
транспортного средства, подается команда модулятору 7 на выдержку давления в тормозной камере 12. После этого колесо приобретает ускорение (сигнал V2(ti) продолжает храниться в памяти запоминающего устройства 54 блока 3 управления). В момент t4 ускорение колеса достигает максимума, чему соответствует перегиб кривой VK. В это время в блоке управления осуществляется две операции: первая -переписывается код в запоминающем устройстве 54 V2(t4)Vk(t4) и поддерживается далее неизменным, являясь опорным кодом для следующего цикла работы системы в антиблокировочном режиме в период времени t А вторая - блок 3 управления подает команду модулятору 7 на повышение давления в тормозной камере 12, контролируемого датчиком 5, вследствие чего скорость VK колеса снова уменьшается. Таким
образом, уменьшается скорость Va транспортного средства, отслеживаемая кодовым сигналом Vz.
Следящее действие модулятора 7 обеспечивается соотношением усилий, передаваемых от шагового электродвигателя 6 через кулачковый элемент 23 и давления в разгрузочной полости 37 на диафрагму 16 сверху, и от давления воздуха в рабочей полости 38 на эту же диафрагму снизу,
Формула изобретения
Электропневматический тормозной привод колеса транспортного средства, со-.
держащий пневматический тормозной контур, в который встроен модулятор давления для избирательного сообщения тормозной камеры с источником сжатого воздуха и атмосферой, имеющий пневматическое и
электромеханическое устройства управления, и электронный блок управления, к входу программируемого таймера которого подключен датчик угловой скорости колеса, к одному из входов его первого устройства параллельного ввода-вывода посредством
аналого-цифрового преобразователя - за- датчик интенсивности торможения, кинематически связанный с педалью тормозного крана, а к выходу второго устройства параллельного ввода-вывода - цепь электромеханического устройства управления модулятора давления, пневматическое устройство управления которого пневматически подключено к тормозному крану, о т л и
чающийся тем, что. с целью снижения расхода электроэнергии, он снабжен датчиком давления, пневматически подключенным к тормозной камере и электрически к другому входу первого устройства параллельного ввода-вывода аналогично задатчику интенсивности торможения, а электромеханическое устройство управления представляет собой шаговый электродвигатель.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления скоростью движения транспортного средства | 1987 |
|
SU1537575A1 |
| МОДУЛЯТОР ЭЛЕКТРОННО-ПНЕВМАТИЧЕСКОЙ ТОРМОЗНОЙ СИСТЕМЫ | 2008 |
|
RU2385241C2 |
| Электропневматическая противоблокировочная тормозная система транспортного средства | 1990 |
|
SU1710402A1 |
| ПРОПОРЦИОНАЛЬНЫЙ МОДУЛЯТОР ЭЛЕКТРОННО-ПНЕВМАТИЧЕСКОЙ ТОРМОЗНОЙ СИСТЕМЫ | 2008 |
|
RU2385242C2 |
| ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА И ГИДРАВЛИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА | 1990 |
|
RU2041090C1 |
| Электропневматический тормозной привод транспортного средства большой грузоподъемности | 1990 |
|
SU1749086A1 |
| Система управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2773117C1 |
| Система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2750559C1 |
| МОДУЛЯТОР ЭЛЕКТРОННОЙ ТОРМОЗНОЙ СИСТЕМЫ | 2005 |
|
RU2314217C2 |
| АНТИБЛОКИРОВОЧНОЕ УСТРОЙСТВО "РОДИНА" ДЛЯ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2254247C1 |
Изобретение относится к автотракторостроению, в частности к электропневматическим тормозным системам транспортных средств. Целью изобретения является снижение расхода электроэнергии. Для этого электропневматический тормозной привод колеса транспортного средства снабжен электронным блоком 3 и шаговым электродвигателем 6 управления пневматическим модулятором 7, который выполнен с кулачковым элементом управления, диафрагмой и разгрузочной полостью, позволяющими повысить надежность работы привода и качество регулирования давления в тормозной камере 12, а также снизить расход электроэнергии. 4 ил. сл С Ij о о со 00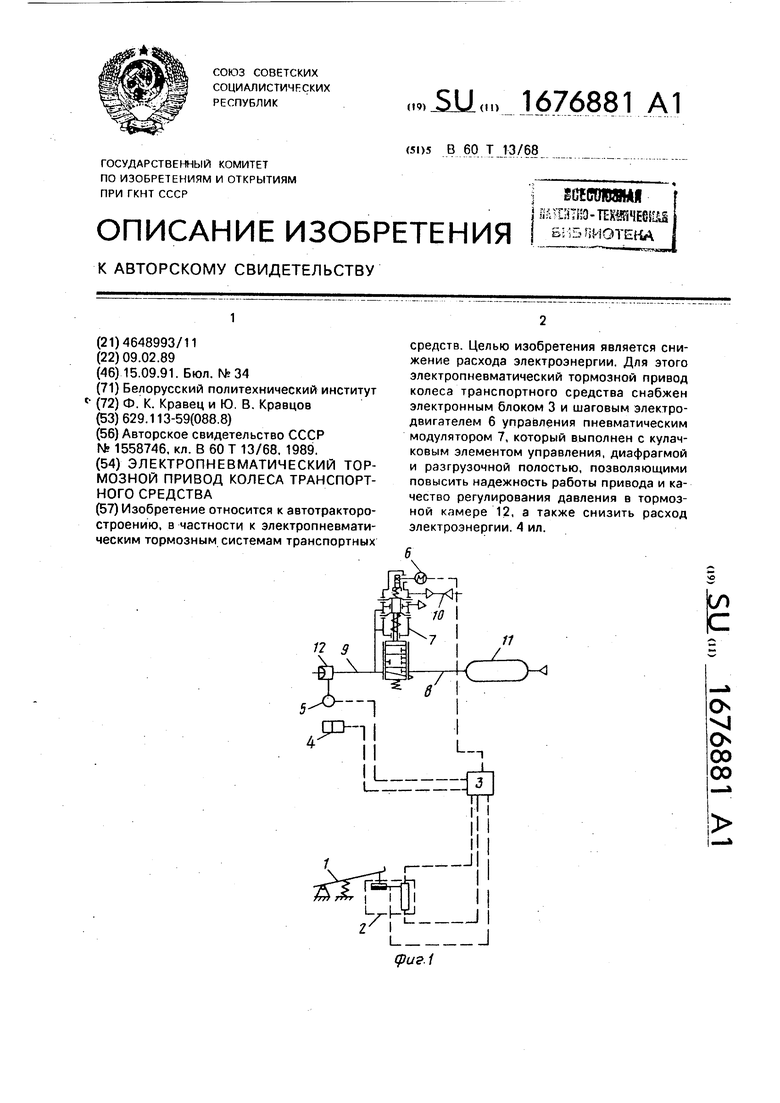
Фиг. 2
Ь tz ta tot
Фиг 4
Составитель С.Макаров Техред М.МоргенталКорректор Т.Малец
Заказ 3074Тираж 333Подписное
ВНИИПИ f осударственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
Редактор М.Товтин
| Электропневматическая тормозная система | 1988 |
|
SU1558746A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
