Изобретение относится к сельскому хозяйству, в частности k автоматическому управлению процессом уборки сель хозкультур.
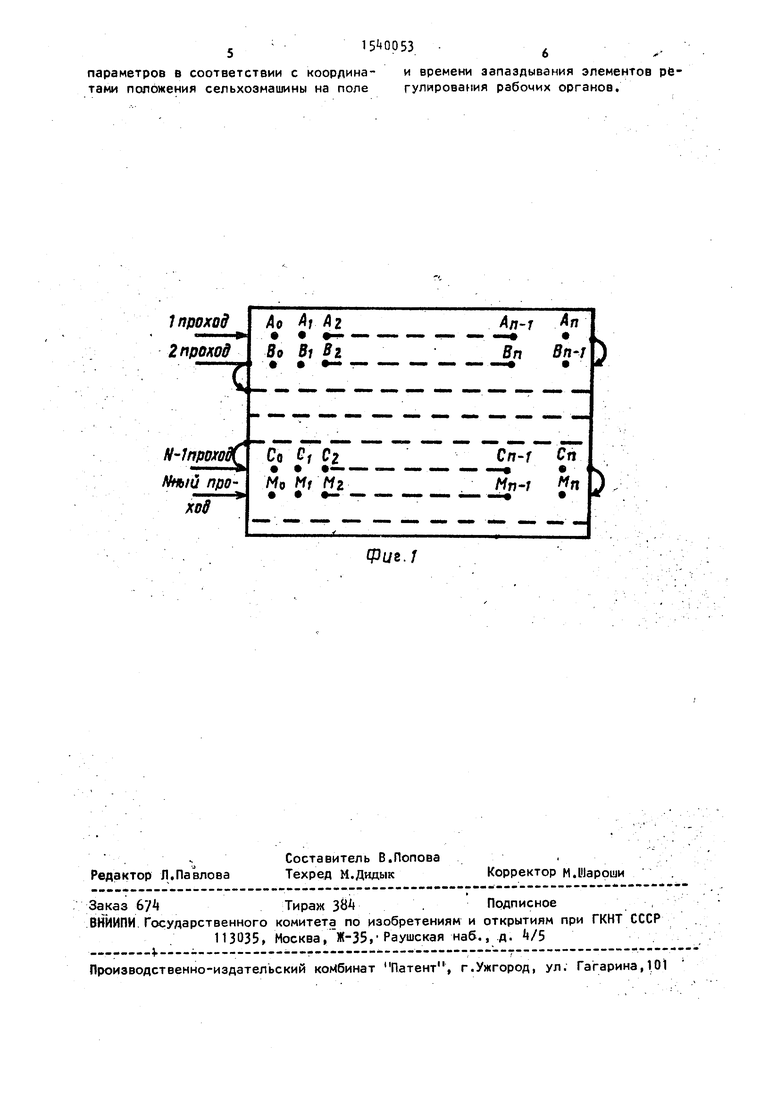
Цепью изобретения является повышение эффективности уборочного процесса. На фиг.1 представлен маршрут движения уборочной машины по полю} на фиг.2 - блок-схема системы автомати- ческого управления технологическим процессом уборочной машины,
Система состоит из объекта 1 управления уборочной машины, датчиков 2, 3 , формирующих сигналы, пропорциональные параметрам технологического состояния поля и убираемой сельхозкультуры, техпроцесса, выполняемого уборочной машиной, и состоя- Ния агрегатов. Датчик 5 выдает информацию о пройденном пути с начала прохода гона уборочной машиной. Пу- ферные каскады 6, 7, 8, 9 согласуют работу датчиков с вычислительным устройством 10. Вычислительное устройство выполняет обработку информации, полученную от датчиков, по программе, находящейся в постоянном запоминающем устройстве П. Инфор- мация, полученная от датчиков, и сигналы управления (результат обработки информации по программе) хранятся в оперативном запоминающем устройстве (ОЗУ) 12.
В соответствии с пройденным расстоянием с начала прохода уборочной машиной вычислительное устройство 10 выдает сигналы о пересылке информаци об управлении из оперативного запо- минающего устройства 12 на буферные каскады 13, I , -15 и далее сигналы управления U, U,, U3 на объект 1 управления. Устройство 16 управления управляет работой вычислительного устройства 10.
С большой степенью достоверности известно, что параметры поля и сель скохоэяйственной культуры, измеренны при первом проходе уборочной машины (фиг.1) в точках А0, А,, ... Л „., А будут незначительно отличаться от аналогичных параметров соответственн в точках В0. В,, ..., К „., , В „ (при втором проходе), Однако параметры поля и сельскохозяйственной культуры измеренные в точке М z, могут значительно отличаться от аналогичных параметров н точке Л1( но на соседнем
5 0 0
о 5
5
5
проходе в точке С7 отличие будет незначительным.
Способ управления технологическим процессом уборочной машины реализует- ,ся следующим образом,
При первом проходе по полю уборочной машиной производится измерение параметров, характеризующих состояние убираемого поля, сельхозкультуры, техпроцесса обработки культуры, состояние и режимы работы агрегатов машины, пройденный путь с начала прохода. Эта информация, поступающая с соответствующих датчиков (например, с датчиков 2, 3, Ь, 5), записывается в оперативное запоминающее устройство 12. По мере накопления данных вычислительное устройство 10 производит обработку этой информации по программе, и результат помещается в ОЗУ 12, привязывая их к расстоянию, пройденйому уборочной машиной.
Таким образом, при первом проходе происходят измерение и накопление всей необходимой информации и ее обработка вычислительным устройством для получения управляющих сигналов,
При втором проходе реализуется управление уборочной машиной и ее агрегатами по сигналам управления U,p U2, U3, выдаваемым из оперативного запоминающего устройства 12 в соответствии с расстоянием, пройденным уборочной машиной с начала второго прохода. Одновременно при втором проходе производятся измерение и запись новой информации и ее обработка по программе. Таким образом, подготавливаются управляющие сигналы для следующего прохода. Далее ггроцесс работы устройства повторяется.
Формула изобретения Способ управления технологическим процессом уборочной машины, включающий измерение величин параметров состояния убираемой культуры, поля и функционирования рабочих органов сельхозмашины и последующую подачу сигналов управления на элементы регулирования р абочих органов уборочной машины, отличающийся тем, что, с целью повышения эффективности уборочного процесса, в каждый момент времени определяют координаты положения сельхозмашины на поле, а сигналы управления формируют на основании измеренных на предыдущем гоне- величин
параметров в соответствии с координатами положения сельхозмашины на поле
и времени запаздывания элементов регулирования рабочих органов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ УБОРОЧНОЙ МАШИНЫ | 2009 |
|
RU2403699C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ УБОРОЧНОЙ МАШИНЫ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2447640C1 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА С ПЕРЕГРУЗОЧНЫМ УСТРОЙСТВОМ | 2009 |
|
RU2495558C2 |
| СПОСОБ НОРМИРОВАНИЯ ВЫРАБОТКИ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2011 |
|
RU2450357C1 |
| Способ автоматического управления технологическим процессом зерноуборочного комбайна | 1986 |
|
SU1720545A1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2011 |
|
RU2460268C1 |
| КОРМОУБОРОЧНЫЙ КОМБАЙН И СПОСОБ ЭКСПЛУАТАЦИИ КОРМОУБОРОЧНОГО КОМБАЙНА | 2019 |
|
RU2786169C2 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
Изобретение относится к сельско- .му хозяйству, в частности к автоматическому управлению процессом уборки сельхозкультур. Целью изобретения является повышение эффективностм уборочного процесса. При реализации способа информация с датчиков, характеризующая параметры технологического состояния поля, убираемой сельхозкультуры, техпроцесса, выполняемого уборочной машиной, и состояний ее агрегатов, поступает в вычислительное устройство 10. Туда же поступает информация о пройденном пути с датчика 5. В соответствии с этой информацией вычислительное устройство 10 определяет местоположение уборочной машины на поле и на основании информации, полученной на предыдущем проходе в области, прилегающей к текущему месту нахождения уборочной машины, вырабатывает сигналы управления агрегатами уборочной машины. 2 ил. в $ to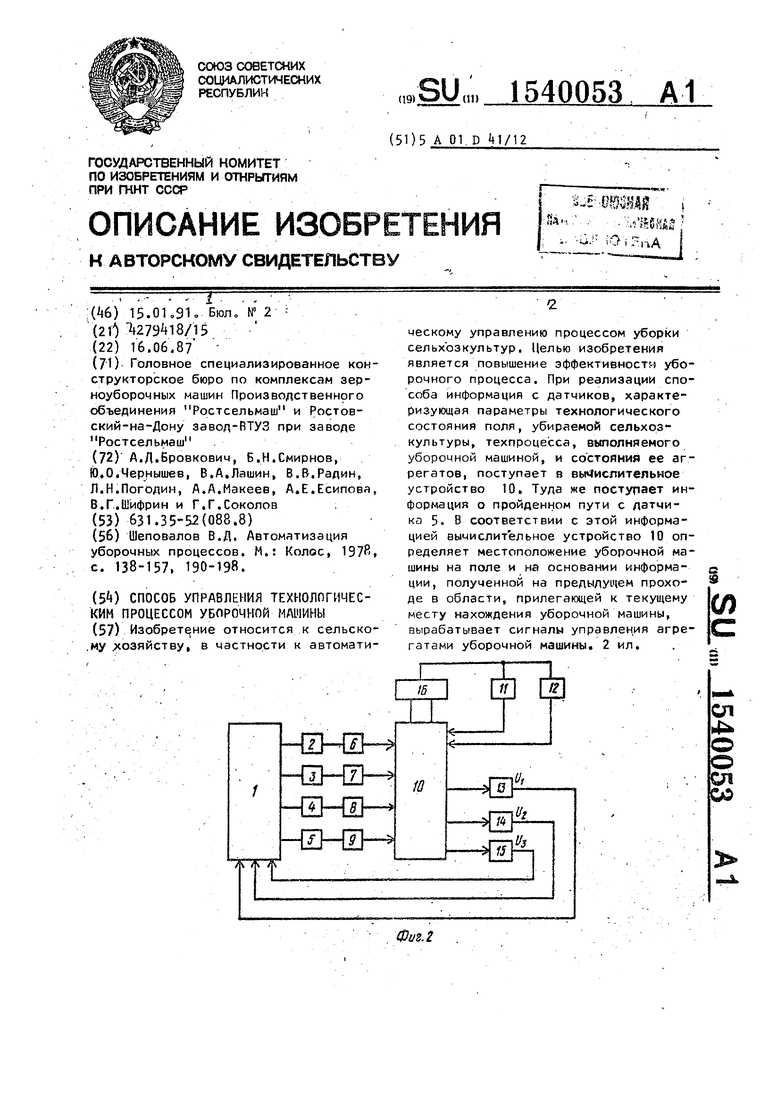
./
| Шеповалов В.Д | |||
| Автоматизация уборочных процессов | |||
| Н.: Колос, 1978 с | |||
| Прибор для определения всасывающей силы почвы | 1921 |
|
SU138A1 |
| ( СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ УБОРОЧНОЙ МАШИНЫ | |||
