Изобретение относится к сельскому хозяйству, в частности к автоматическому управлению процессом уборки сельхозкультур.
Известен способ управления технологическим процессом уборочной машины, включающий измерение величин параметров состояния убираемой культуры, поля и функционирования рабочих органов сельхозмашины и последующую подачу сигналов управления на элементы регулирования рабочих органов уборочной машины, с целью повышения эффективности уборочного процесса, в каждый момент времени определяют координаты положения сельхозмашины на поле, а сигналы управления формируют на основании измеренных на предыдущем гоне величин параметров в соответствии с координатами положения сельхозмашины на поле и временем запаздывания элементов регулирования рабочих органов (описание изобретения к авторскому свидетельству, SU №1540053, кл. A01D 41/12, опубл. 15.01.91. Бюл. №2).
Недостатком данного способа является заниженная информативность, обусловленная отсутствием возможности привязки урожайности и качества убираемой культуры к конкретной области поля, формирования схемы урожайности и качества убираемой культуры поля, позволяющей определять участки различной урожайности и качества убираемой культуры.
Технический результат изобретения достигается тем, что способ управления технологическим процессом уборочной машины, включающий измерение величин параметров состояния убираемой культуры, поля и функционирования рабочих органов сельхозмашины и последующую подачу сигналов управления на элементы регулирования рабочих органов уборочной машины, с целью повышения эффективности уборочного процесса, в каждый момент времени определяют координаты положения сельхозмашины на поле, а сигналы управления формируют на основании измеренных на предыдущем гоне величин параметров в соответствии с координатами положения сельхозмашины на поле и временем запаздывания элементов регулирования рабочих органов, дополнительно осуществляют оценку параметров урожайности и качества убираемой культуры и их согласование с координатами положения сельхозмашины на поле, формирование схемы урожайности и качества убираемой культуры поля, позволяющей определять участки различной урожайности и качества убираемой культуры.
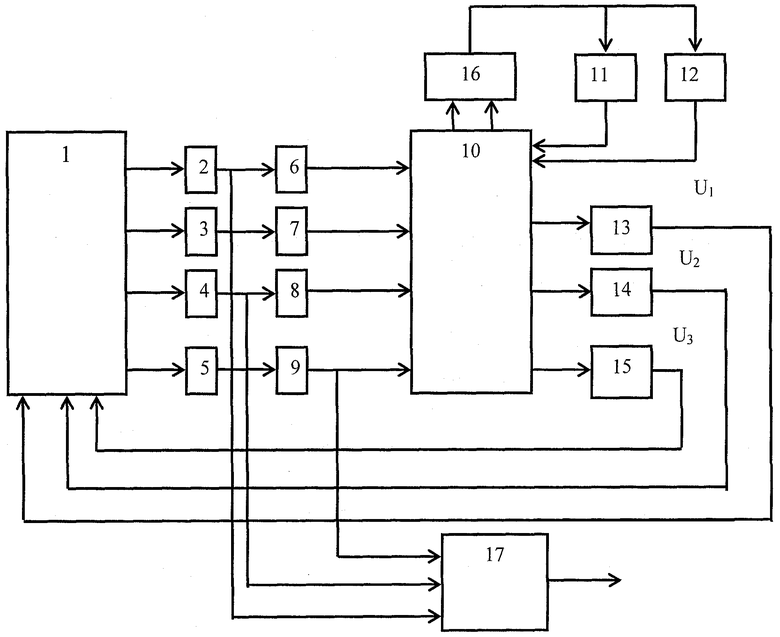
На чертеже приведена блок-схема системы автоматического управления технологическим процессом уборочной машины, где: 1 - объект управления уборочной машины; 2, 3, 4 - датчики, формирующие сигналы, пропорциональные параметрам технологического состояния поля и убираемой сельхозкультуры, техпроцесса, выполняемого уборочной машиной; 5 - датчик пройденного пути с начала прохода; 6, 7, 8, 9, 13, 14, 15 - буферные каскады; 10 - вычислительное устройство; 11 - запоминающее устройство; 12 - оперативное запоминающее устройство; 16 - устройство управления работой вычислительного устройства 10; 17 - вычислитель.
Система состоит из объекта 1 управления уборочной машины, датчиков 2, 3, 4, формирующих сигналы, пропорциональные параметрам технологического состояния поля и убираемой сельхозкультуры, техпроцесса, выполняемого уборочной машиной, и состояния агрегатов. Датчик 5 выдает информацию о пройденном пути с начала прохода гона уборочной машины. Буферные каскады 6, 7, 8, 9 согласуют работу датчиков с вычислительным устройством 10. Вычислительное устройство 10 выполняет обработку информации, полученную от датчиков, по программе, находящейся в постоянном запоминающем устройстве 11. Информация, полученная от датчиков, и сигналы управления (результат обработки информации по программе) хранятся в оперативном запоминающем устройстве (ОЗУ) 12. Вычислитель 17 формирует на выходе схему урожайности и качества убираемой культуры поля, позволяющую определять участки различной урожайности и качества убираемой культуры.
Способ управления технологическим процессом уборочной машины реализуется следующим образом.
При первом проходе по полю уборочной машиной производится измерение параметров, характеризующих состояние убираемого поля, сельхозкультуры, техпроцесса обработки культуры, состояние и режимы работы агрегатов машины, пройденный путь с начала прохода. Эта информация, поступающая с соответствующих датчиков (например, с датчиков 2, 3, 4, 5), записывается в оперативное запоминающее устройство 12. По мере накопления данных вычислительное устройство 10 производит обработку этой информации по программе, и результат помещается в ОЗУ 12, привязывая их к расстоянию, пройденному уборочной машиной. Таким образом, при первом проходе происходит измерение и накопление всей необходимой информации и ее обработка вычислительным устройством для получения управляющих сигналов. При втором проходе реализуется управление уборочной машиной и ее агрегатами по сигналам управления U1, U2, U3, выдаваемым из оперативного запоминающего устройства 12 в соответствии с расстоянием, пройденным уборочной машиной с начала второго прохода. Одновременно при втором проходе производится измерение и запись новой информации и ее обработка по программе. Таким образом подготавливаются управляющие сигналы для последующего прохода. Далее процесс работы устройства повторяется.
Формирование схемы урожайности и качества убираемой культуры поля происходит в вычислителе 17 по сигналам с датчиков 2 и 4, пропорциональным параметрам технологического состояния поля и убираемой сельхозкультуры, а также с датчика 5 пройденного пути с начала прохода. Выходом устройства является выход вычислителя 17.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ УБОРОЧНОЙ МАШИНЫ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2447640C1 |
| Способ управления технологическим процессом уборочной машины | 1987 |
|
SU1540053A1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УБОРКИ ЗЕРНА КОМБАЙНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2462019C1 |
| Способ автоматического управления технологическим процессом зерноуборочного комбайна | 1986 |
|
SU1720545A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2410719C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2404897C1 |
| ПНЕВМАТИЧЕСКИЙ ВЫСЕВАЮЩИЙ АППАРАТ | 2009 |
|
RU2415542C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2152147C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2545150C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2008 |
|
RU2403591C2 |
Изобретение относится к сельскому хозяйству. Способ управления технологическим процессом уборочной машины включает измерение величин параметров состояния убираемой культуры, поля и функционирования рабочих органов машины. На основании измеренных параметров подают сигналы управления на элементы регулирования рабочих органов уборочной машины. В каждый момент времени определяют координаты положения машины на поле. Сигналы управления формируют на основании измеренных на предыдущем гоне величин параметров в соответствии с координатами положения сельхозмашины на поле и временем запаздывания элементов регулирования рабочих органов. Осуществляют оценку параметров урожайности и качества убираемой культуры. Формируют схему урожайности и качества убираемой культуры поля, позволяющую определять участки различной урожайности и качества убираемой культуры. Способ управления обеспечивает согласование урожайности и качества убираемой культуры на конкретной области поля с координатами уборочной машины, что повышает эффективность процесса уборки. 1 ил.
Способ управления технологическим процессом уборочной машины, включающий измерение величин параметров состояния убираемой культуры, поля и функционирования рабочих органов сельхозмашины и последующую подачу сигналов управления на элементы регулирования рабочих органов уборочной машины, с целью повышения эффективности уборочного процесса, в каждый момент времени определяют координаты положения сельхозмашины на поле, а сигналы управления формируют на основании измеренных на предыдущем гоне величин параметров в соответствии с координатами положения сельхозмашины на поле и временем запаздывания элементов регулирования рабочих органов, отличающийся тем, что осуществляют оценку параметров урожайности и качества убираемой культуры и их согласование с координатами положения сельхозмашины на поле, формирование схемы урожайности и качества убираемой культуры поля, позволяющей определять участки различной урожайности и качества убираемой культуры.
| Способ управления технологическим процессом уборочной машины | 1987 |
|
SU1540053A1 |
| Способ контроля технологического процесса зерноуборочного комбайна | 1985 |
|
SU1319796A1 |
| SU 1697513 A1, 15.12.1991 | |||
| Способ автоматического управления технологическим процессом зерноуборочного комбайна | 1986 |
|
SU1720545A1 |
| Система автоматического регулирования и контроля технологического процесса зерноуборочного комбайна | 1984 |
|
SU1175386A2 |
| EP 1446997 A1, 18.08.2004. | |||

