м
4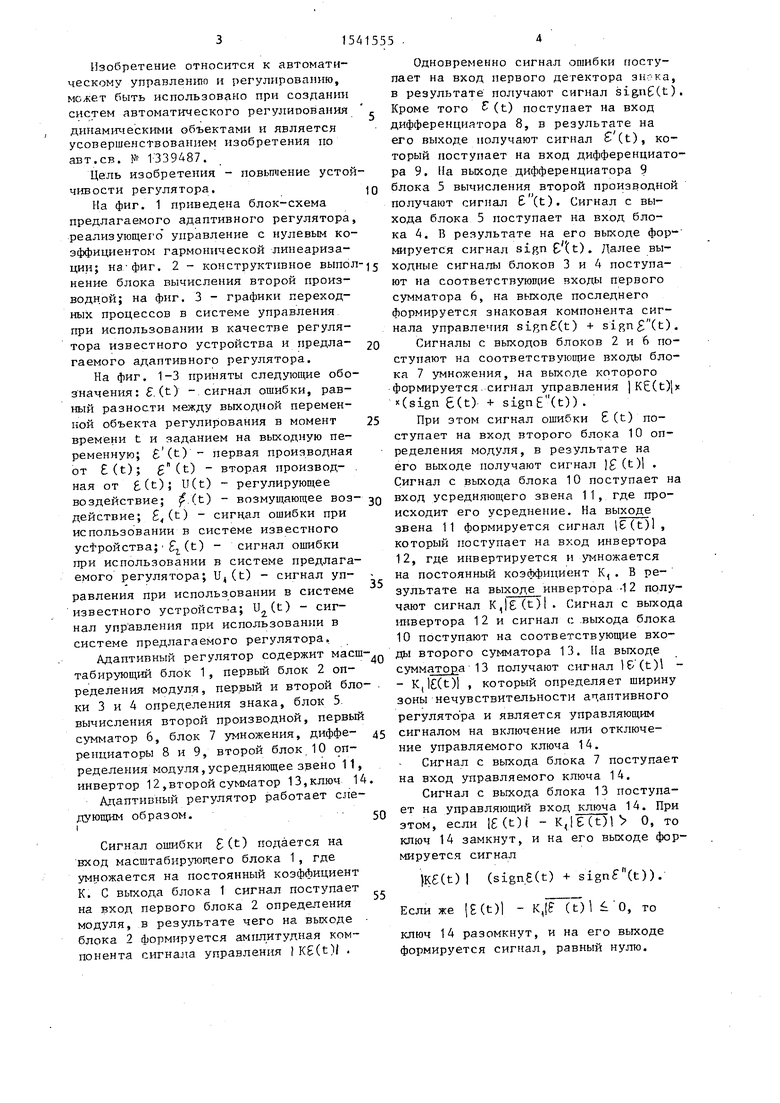
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный регулятор | 1989 |
|
SU1675845A1 |
| Устройство адаптации | 1979 |
|
SU813358A1 |
| Многоканальный регулятор | 1985 |
|
SU1290253A1 |
| Адаптивный регулятор | 1985 |
|
SU1339487A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| Адаптивный регулятор | 1980 |
|
SU911462A1 |
| Адаптивное регулирующее устройство | 1985 |
|
SU1273878A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| Устройство с размытой логической самоорганизацией для автоматического управления объектом,например ректификационной колонной | 1986 |
|
SU1434402A1 |
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
Изобретение относится к автоматическому управлению и регулированию, может быть использовано при создании систем автоматического регулирования динамическими объектами и является усовершенствованием изобретения по авт.св.N1339487. Цель изобретения - повышение устойчивости регулятора. Регулятор содержит масштабирующий блок 1, блоки 2, 10, определения модуля, блок умножения, блоки 3, 4 определения знака, блок вычисления второй производной, сумматоры 6,13, усредняющее звено 11, инвертор 12. В закон управления регулятора введена зона нечувствительности, что позволяет уменьшить влияние высших гармоник во входном сигнале регулятора. 3 ил.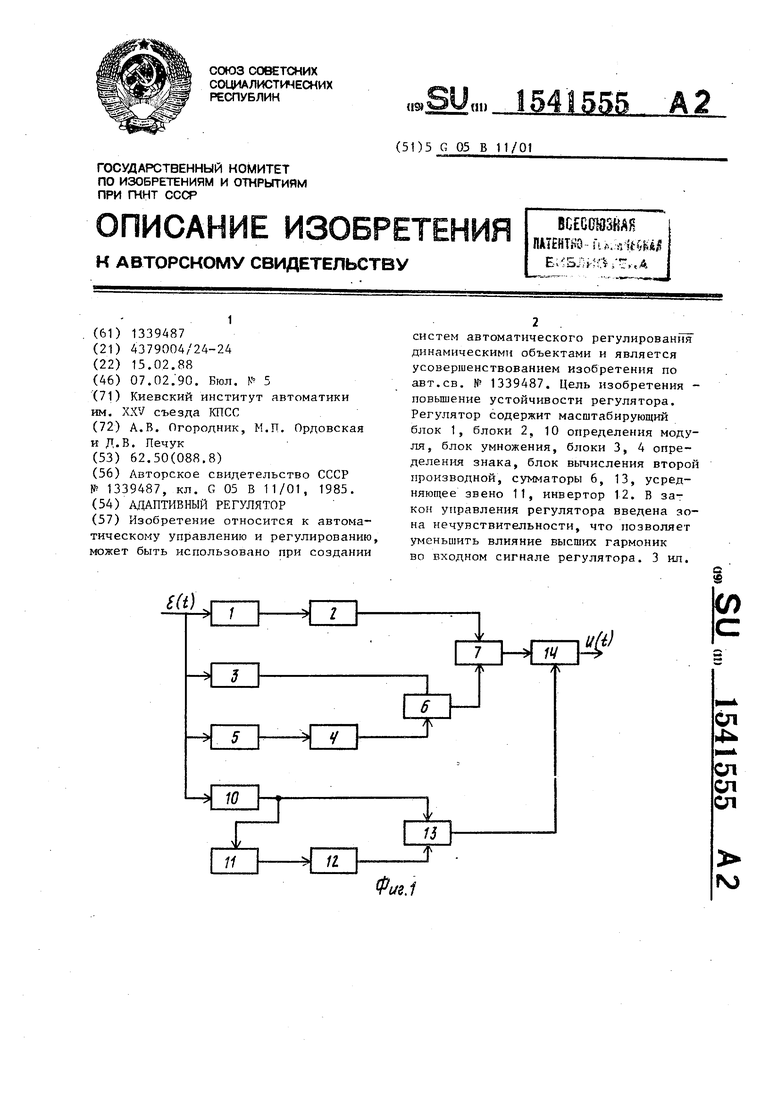
сп
Јь СЛ
сл
СП
fia.1
143
Изобретение относится к автоматическому управлению и регулированию, может быть использовано при создании систем автоматического регулирования
динамическими объектами и является усовершенствованием изобретения но авт.св. № 1339487.
Цель изобретения - повышение устойчивости регулятора.
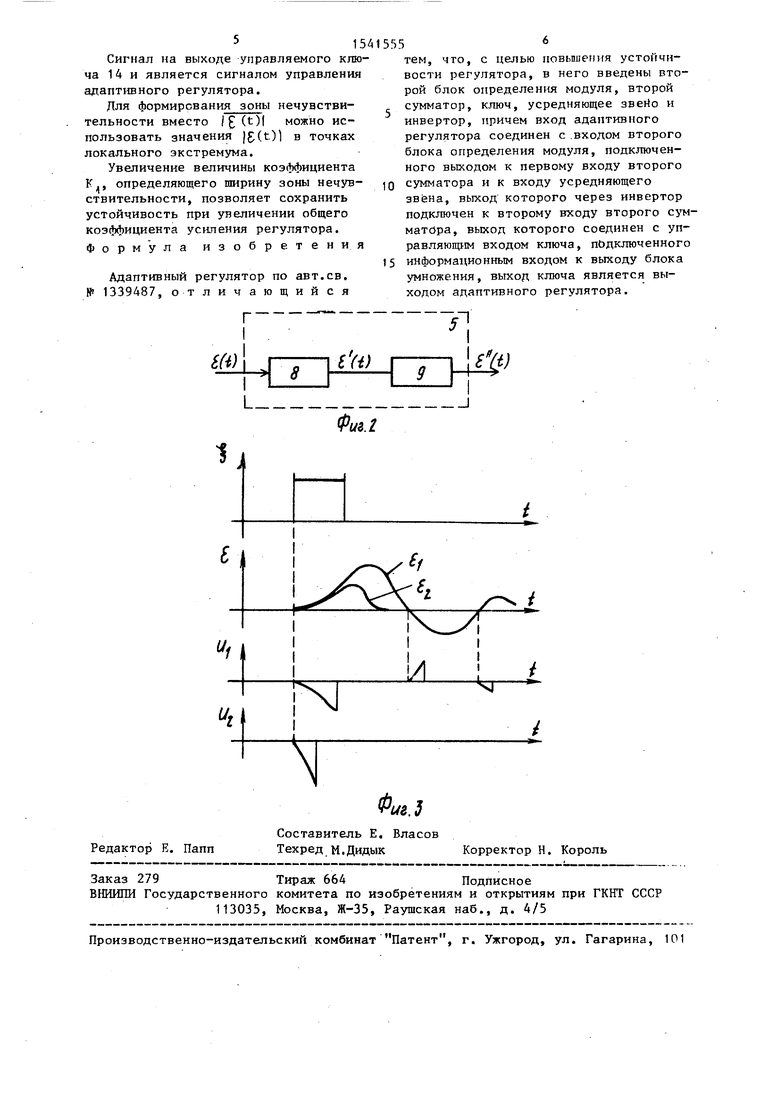
На фиг. 1 приведена блок-схема предлагаемого адаптивного регулятора, реализующего управление с нулевым коэффициентом гармонической линеаризации; на фиг. 2 - конструктивное выполнение блока вычисления второй производной; на фиг. 3 - графики переходных процессов в системе управления при использовании в качестве регулятора известного устройства и предлагаемого адаптивного регулятора.
На фиг. 1-3 приняты следующие обозначения: 8 (О - сигнал ошибки, равный разности между выходной переменной объекта регулирования в момент времени t и заданием на выходную переменную; Ј (t) - первая производная от Ј(t); g (t) - вторая производная от Ј(t); U(t) - регулирующее воздействие; fi (t) - возмущающее воздействие; Ј(t) - сигнал ошибки при использовании в системе известного устройства;Јг(t) - сигнал ошибки при использовании в системе предлагаемого регулятора; U,(t) - сигнал управления при использовании в системе известного устройства; U2(t) - сигнал управления при использовании в системе предлагаемого регулятора.
Адаптивный регулятор содержит масштабирующий блок 1, первый блок 2 определения модуля, первый и второй блоки 3 и 4 определения знака, блок 5 вычисления второй производной, первый сумматор 6, блок 7 умножения, дифференциаторы 8 и 9, второй блок 10 определения модуля,усредняющее звено 11, инвертор 12,второй сумматор 13,ключ 14
Адаптивный регулятор работает следующим образом, i
Сигнал ошибки Ј(t) подается на вход масштабирующего блока 1, где умножается на постоянный коэффициент К. С выхода блока 1 сигнал поступает на вход первого блока 2 определения модуля, в результате чего на выходе блока 2 формируется амплитудная компонента сигнала управления I KЈ(t)| .
0
5
0
5
0
5
0
5
0
5
Одновременно сигнал ошибки поступает на вход первого детектора эн-ка, в результате получают сигнал signЈ(t). Кроме того Ј(t) поступает на вход дифференциатора 8, в результате на его выходе получают сигнал Ј (t), который поступает на вход дифференциатора 9. На выходе дифференциатора 9 блока 5 вычисления второй производной получают сигнал Ј (t). Сигнал с выхода блока 5 поступает на вход блока 4. В результате на его выходе формируется сигнал sign Ј (t). Далее выходные сигналы блоков 3 и 4 поступают на соответствующие входы первого сумматора 6, на выходе последнего формируется знаковая компонента сигнала управления sip,nЈ(t) + signЈ(t).
Сигналы с выходов блоков 2 и 6 поступают на соответствующие входы блока 7 умножения, на выходе которого формируется сигнал управления | KЈ(t)|x (sign Ј(t) + signЈ(t)) .
При этом сигнал ошибки Ј(t) поступает на вход второго блока 10 определения модуля, в результате на его выходе получают сигнал Ј(t)| . Сигнал с выхода блока 10 поступает на вход усредняющего звена 11, где происходит его усреднение. На выходе звена 11 формируется сигнал lЈ(t)l, который поступает на вход инвертора 12, где инвертируется и умножается на постоянный коэффициент К,. В результате на выходе инвертора -12 получают сигнал K,|Ј(t)| . Сигнал с выхода инвертора 12 и сигнал с выхода блока 10 поступают на соответствующие входы второго сумматора 13. На выходе сумматора 13 получают сигнал l&(t)l - - K,lЈ(t)| , который определяет ширину зоны нечувствительности адаптивного регулятора и является управляющим сигналом на включение или отключение управляемого ключа 14.
Сигнал с выхода блока 7 поступает на вход управляемого ключа 14.
Сигнал с выхода блока 13 поступает на управляющий вход ключа 14. При этом, если Ј(t)( - K,|Ј(t)l 0, то ключ 14 замкнут, и на его выходе формируется сигнал
jKЈ(t) | (signЈ(t) + signЈ(t)).
Если же |Ј(t)l - K,(F7t)l 0, то
ключ 14 разомкнут, и на его выходе формируется сигнал, равный нулю.
Сигнал на выходе управляемого ключа 1 4 и является сигналом управления адаптивного регулятора.
Для формирования зоны нечувствительности вместо /Ј (t)| можно использовать значения |Ј(t)l в точках локального экстремума.
Увеличение величины коэффициента К., определяющего ширину зоны нечувствительности, позволяет сохранить устойчивость при увеличении общего коэффициента усиления регулятора. Формула изобретения
Адаптивный регулятор по авт.св. № 1339487, отличающийся
L.
5
тем, что, с целью повышения устойчивости регулятора, в него введены второй блок определения модуля, второй сумматор, ключ, усредняющее звено и инвертор, причем вход адаптивного регулятора соединен с входом второго блока определения модуля, подключенного выходом к первому входу второго сумматора и к входу усредняющего звена, выход которого через инвертор подключен к второму входу второго сумматора, выход которого соединен с управляющим входом ключа, подключенного информационным входом к выходу блока умножения, выход ключа является выходом адаптивного регулятора.
.
| Адаптивный регулятор | 1985 |
|
SU1339487A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
