(Л
С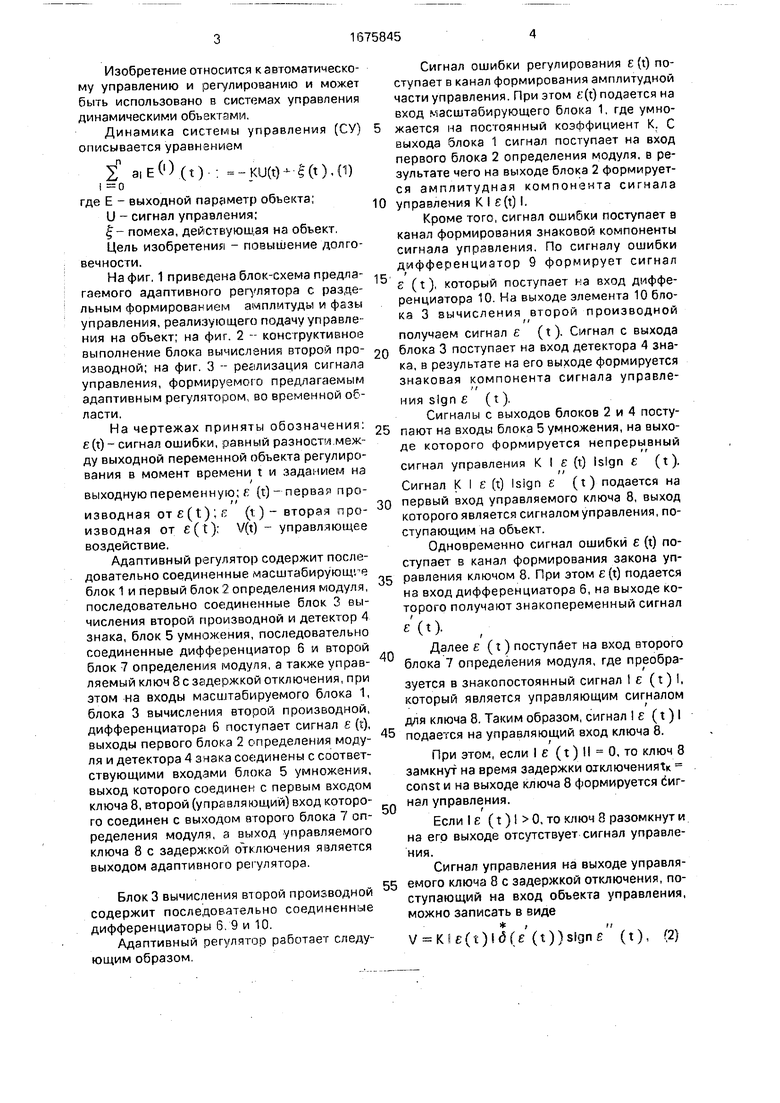
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный регулятор | 1988 |
|
SU1541555A2 |
| Адаптивный регулятор | 1985 |
|
SU1339487A1 |
| Адаптивное регулирующее устройство | 1982 |
|
SU1064271A1 |
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
| Адаптивный регулятор | 1980 |
|
SU911462A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Система управления измельчительным агрегатом | 1982 |
|
SU1101302A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| АДАПТИВНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ПРОЦЕССА КОНТРОЛЯ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 1990 |
|
RU2042168C1 |
| Адаптивная система регулирования | 1978 |
|
SU813356A1 |
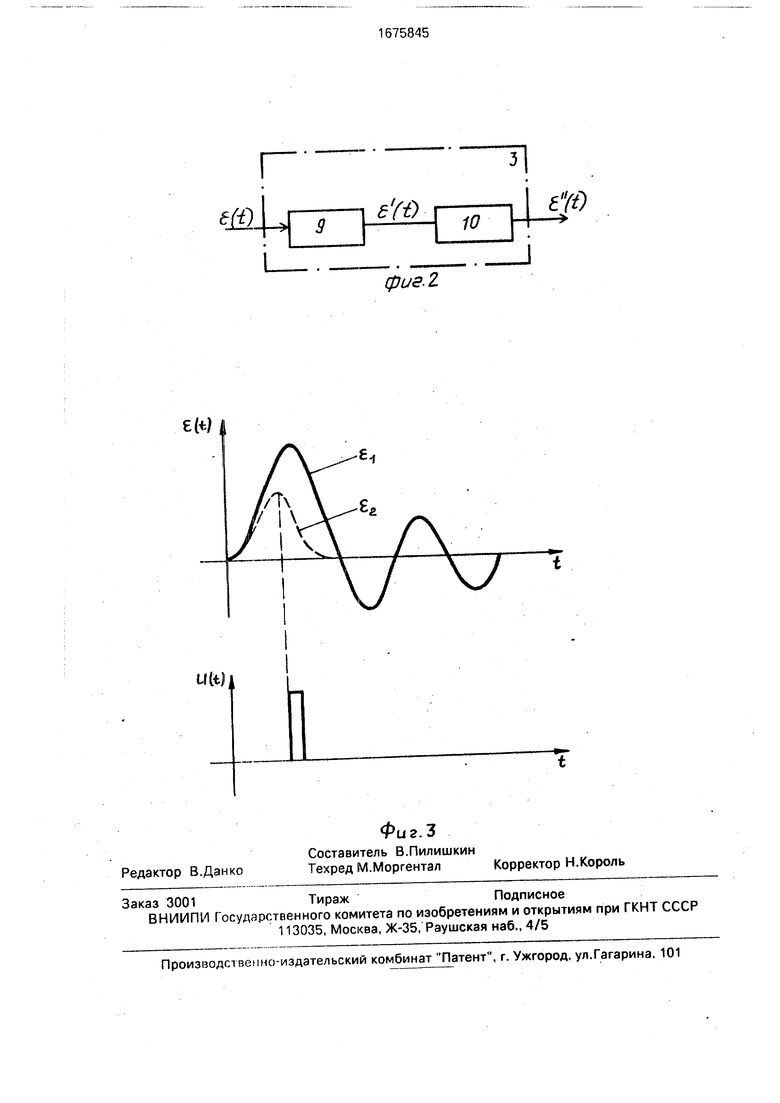
Изобретение относится к автоматическому управлению и регулированию и может быть использовано в системах управления динамическими обьектами. Цель изобретения - повышение долговечности. Адаптивный регулятор содержит последовательно соединенные масштабирующий блок 1. первый блок 2 определения модуля, блок 5 умножения, последовательно соединенные блок 3 вычисления второй производной, детектор 4 знака и последовательно соединенные дифференциатор 6, второй блок 7 определения модуля, управляемый ключ 8 с задержкой отключения. Выход ключа является сигналом управления. Управление, формируемое адаптивным регулятором, подается на объект редко, по мере необходимости. 3 ил.
u(f)
О
Я
00
4Ь
ся
Изобретение относится к автоматическому управлению и регулированию и может быть использовано в системах управления динамическими объектами.
Динамика системы управления (СУ) описывается уравнением
2П a,E(0(t) -KU(t)-|(t),(1)
0
где Е - выходной параметр объекта;
U - сигнал управления;
Ј- помеха, действующая на объект.
Цель изобретения - повышение долговечности.
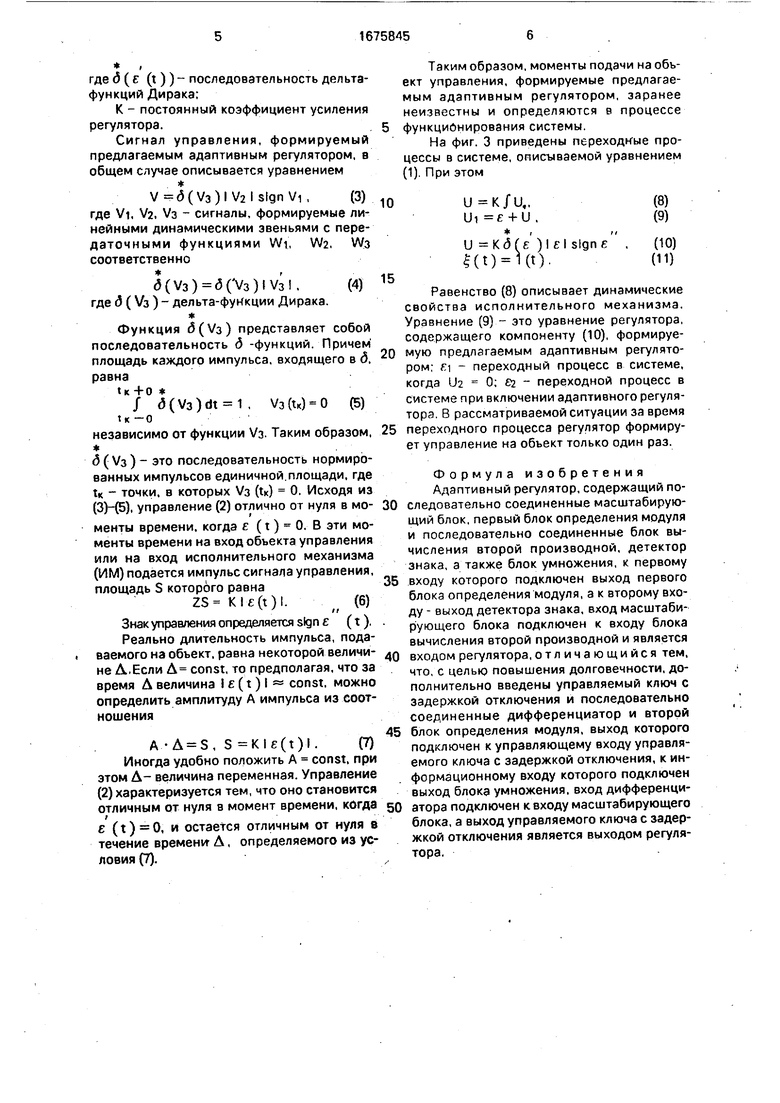
На фиг. 1 приведена блок-схема предлагаемого адаптивного регулятора с раздельным формированием амплитуды и фазы управления, реализующего подачу управления на объект; на фиг. 2 - конструктивное выполнение блока вычисления второй производной; на фиг. 3 - реализация сигнала управления, формируемого предлагаемым адаптивным регулятором, во временной области.
На чертежах приняты обозначения: Ј (т.) - сигнал ошибки, равный разности между выходной переменной объекта регулирования в момент времени t и заданием на
i
выходную переменную; Ј (t)-первая про/1
извод ная от Ј (t) ; Ј (t) вторая производная от e(t); V(t) - управляющее воздействие.
Адаптивный регулятор содержит последовательно соединенные масштабирующие блок 1 и первый блок 2 определения модуля, последовательно соединенные блок 3 вычисления второй производной и детектор 4 знака, блок 5 умножения, последовательно соединенные дифференциатор б и второй блок 7 определения модуля, а также управляемый ключ 8 с задержкой отключения, при этом на входы масштабируемого блока 1, блока 3 вычисления второй производной, дифференциатора 6 поступает сигнал е (t), выходы первого блока 2 определения модуля и детектора 4 знака соединены с соответствующими входами блока 5 умножения, выход которого соединен с первым входом ключа 8, второй (управляющий) вход которого соединен с выходом второго блока 7 определения модуля, а выход управляемого ключа 8 с задержкой отключения является выходом адаптивного регулятора.
БлокЗ вычисления второй производной содержит последовательно соединенные дифференциаторы 6, 9 и 10.
Адаптивный регулятор работает следующим образом.
Сигнал ошибки регулирования Ј (t) поступает в канал формирования амплитудной части управления. При этом Ј(t) подается на вход масштабирующего блока 1, где умно- жается на постоянный коэффициент К. С выхода блока 1 сигнал поступает на вход первого блока 2 определения модуля, в результате чего на выходе блока 2 формируется амплитудная компонента сигнала 0 управления К I Ј(t) I.
Кроме того, сигнал ошибки поступает в канал формирования знаковой компоненты сигнала управления. По сигналу ошибки дифференциатор 9 формирует сигнал
С
Ј (t), который поступает на вход дифференциатора 10. На выходе элемента 10 блока 3 вычисления второй производной
получаем сигнал Ј (t ). Сигнал с выхода 0 блока 3 поступает на вход детектора 4 знака, в результате на его выходе формируется знаковая компонента сигнала управле/ Г
ния sign Ј (t ).
Сигналы с выходов блоков 2 и 4 посту- 5 пают на входы блока 5 умножения, на выходе которого формируется непрерывный
сигнал управления К I Ј (t) tslgn Ј (t).
Сигнал К I Ј (t) Isign Ј (t) подается на 0 первый вход управляемого ключа 8, выход которого является сигналом управления, поступающим на объект.
Одновременно сигнал ошибки Ј (t) поступает в канал формирования закона уп- 5 равления ключом 8. При этом e(t) подается на вход дифференциатора б, на выходе которого получают знакопеременный сигнал
e (t).
п Далее Ј (t) поступает на вход второго блока 7 определения модуля, где преобразуется в знакопостоянный сигнал I Ј (t) I, который является управляющим сигналом
для ключа 8. Таким образом, сигнал I Ј (t ) I 5 подается на управляющий вход ключа 8.
При этом, если I Ј (t) II 0, то ключ 8 замкнут на время задержки отключения const и на выходе ключа 8 формируется биг- Q нал управления.
Если I Ј (t ) I 0, то ключ 8 разомкнут и на его выходе отсутствует сигнал управления.
Сигнал управления на выходе управля- 5 емого ключа 8 с задержкой отключения, поступающий на вход объекта управления, можно записать в виде
V Kle(t)(e (t)) (t), (2)
где д ( Е (t ) ) - последовательность дельта- функций Дирака;
К - постоянный коэффициент усиления регулятора.
Сигнал управления, формируемый предлагаемым адаптивным регулятором, в
общем случае описывается уравнением
(V3)IV2lslgnVi,(3)
где Vi, Va, Vs - сигналы, формируемые линейными динамическими звеньями с передаточными функциями WL Л/2, Л/з соответственно
,
5(V3)6( V3)I V3 ,(4)
где 6 ( Va ) - дельта-функции Дирака.
Функция 5(Vs) представляет собой последовательность д -функций. Причем площадь каждого импульса, входящего в б, равна
ttc+O
/ 6(V3)dt 1, VsM-O (5)
tK -0
независимо от функции Уз. Таким образом.
5(/з)- это последовательность нормированных импульсов единичной площади, где tK - точки, в которых Va (tK) 0. Исходя из (3)-(5), управление (2) отлично от нуля в моменты времени, когда Ј (т ) 0. В эти моменты времени на вход объекта управления или на вход исполнительного механизма (ИМ) подается импульс сигнала управления, площадь S которого равна
zs KiЈ(t)i. it (6)
Знак управления определяется sign Ј (t ).
Реально длительность импульса, подаваемого на объект, равна некоторой величине А,Если Л const, то предполагая, что за время Л величина I Ј (t) I « const, можно определить амплитуду А импульса из соотношения
А A S, S Kle(t)l.(7)
Иногда удобно положить А const, при
этом А- величина переменная. Управление
(2) характеризуется тем, что оно становится
отличным от нуля в момент времени, когда
Ј (t) 0, и остается отличным от нуля в течение времени- А, определяемого из условия (7).
Таким образом, моменты подачи на объект управления, формируемые предлагаемым адаптивным регулятором, заранее неизвестны и определяются в процессе функцибнирования системы.
На фиг, 3 приведены переходные процессы в системе, описываемой уравнением (1). При этом
,,(8)
+ U,(9)
гг/
U (Ј )lEl signЈ .(10)
Ј(t) 1(t).(11)
Равенство (8) описывает динамические свойства исполнительного механизма. Уравнение (9) - это уравнение регулятора, содержащего компоненту (10), формируемую предлагаемым адаптивным регулятором; Јi - переходный процесс в системе, когда Ih 0; Ј2 - переходной процесс в системе при включении адаптивного регулятора. В рассматриваемой ситуации за время
переходного процесса регулятор формирует управление на объект только один раз.
Формула изобретения Адаптивный регулятор, содержащий последовательно соединенные масштабирующий блок, первый блок определения модуля и последовательно соединенные блок вычисления второй производной, детектор знака, а также блок умножения, к первому
входу которого подключен выход первого блока определения модуля, а к второму входу - выход детектора знака, вход масштабирующего блока подключен к входу блока вычисления второй производной и является
входом регулятора, отличающийся тем, что, с целью повышения долговечности, дополнительно введены управляемый ключ с задержкой отключения и последовательно соединенные дифференциатор и второй
блок определения модуля, выход которого подключен к управляющему входу управляемого ключа с задержкой отключения, к информационному входу которого подключен выход блока умножения, вход дифференциатора подключен к входу масштабирующего блока, а выход управляемого ключа с задержкой отключения является выходом регулятора.
Г
31
фиг. 2
| Импульсный регулятор | 1981 |
|
SU1004969A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Нелинейные корректирующие устройства в системах автоматического управления | |||
| Под ред | |||
| Ю.И | |||
| Топчеева | |||
| - М.: Машиностроение, 1971, с 210. | |||
