Изобретение относится к линейным шаговым двигателям со стрикшюнными движущими элементами и может бьп-ь использовано в станках и оптических приборах.
Целью изобретения является повы- memte эффективности работы привода на упругую нагрузку в системах с обратной связью.
Такой способ управления линейным шаговым двигателем с упругой нагрузкой позволяет устранить обратный ход CTpHKUdtoHHoro элемента и тем самым повысить точность и плавность перемещения, а введение корректировки управляющего воздействия по предварительно определенно нагрузочной характеристике стрикционного элемента позволяет отрабитлть последний шаг с высокой точностью псремешения. , 24
Высокая точность перемещения обеспе- чивается также конструктивным выполнением зажимов, усилия зажатия которых не влияли бы на точность отработки шага перемещения. Шагание с максимальным шагом перемещения и |Точной отработки последнего шага позволяет добиться высокого быстродействия двигателя при отработке заданного перемещения.
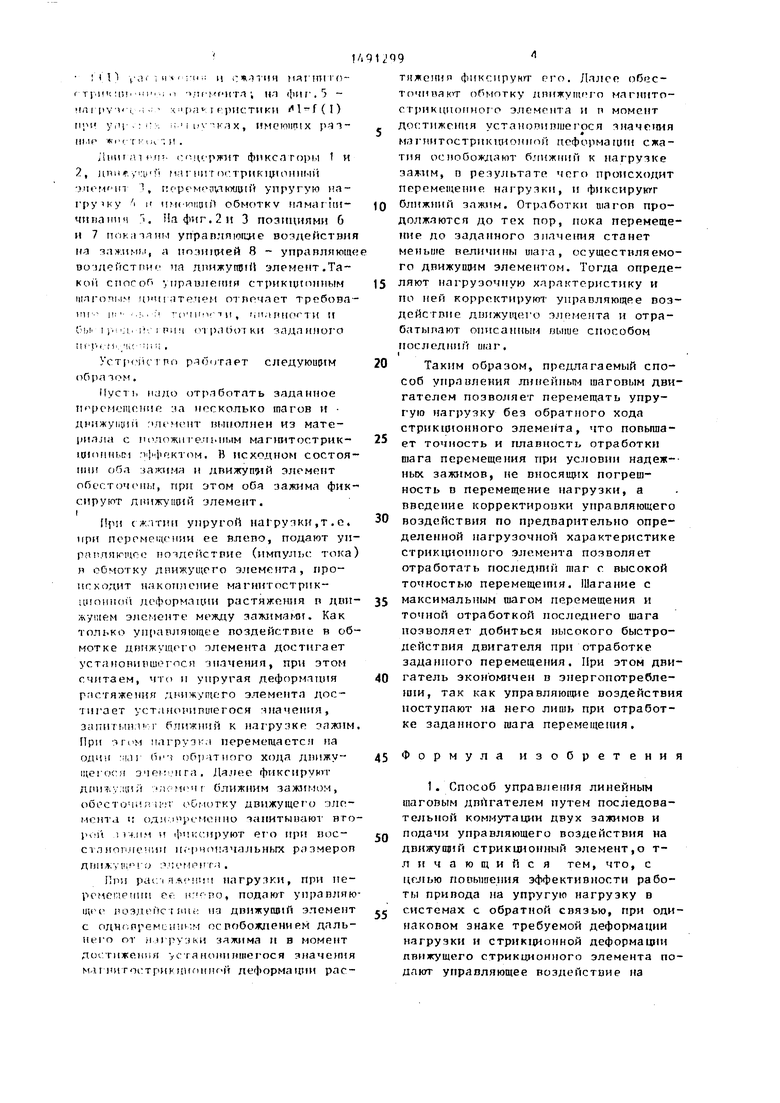
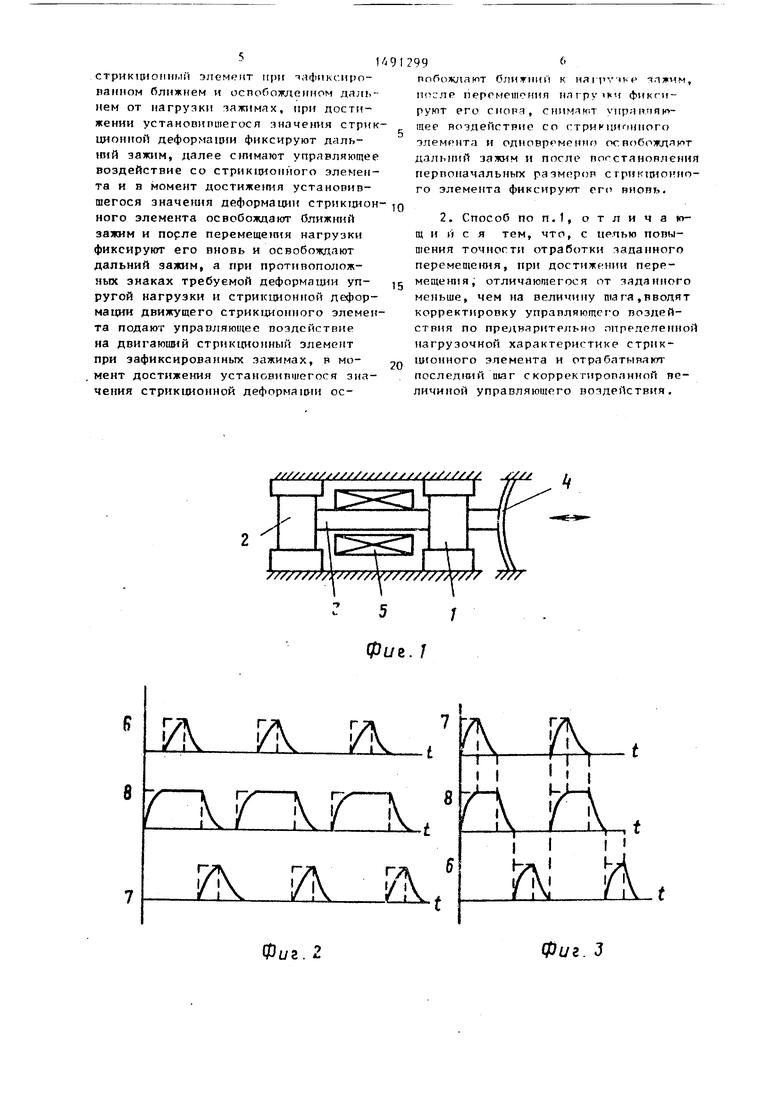
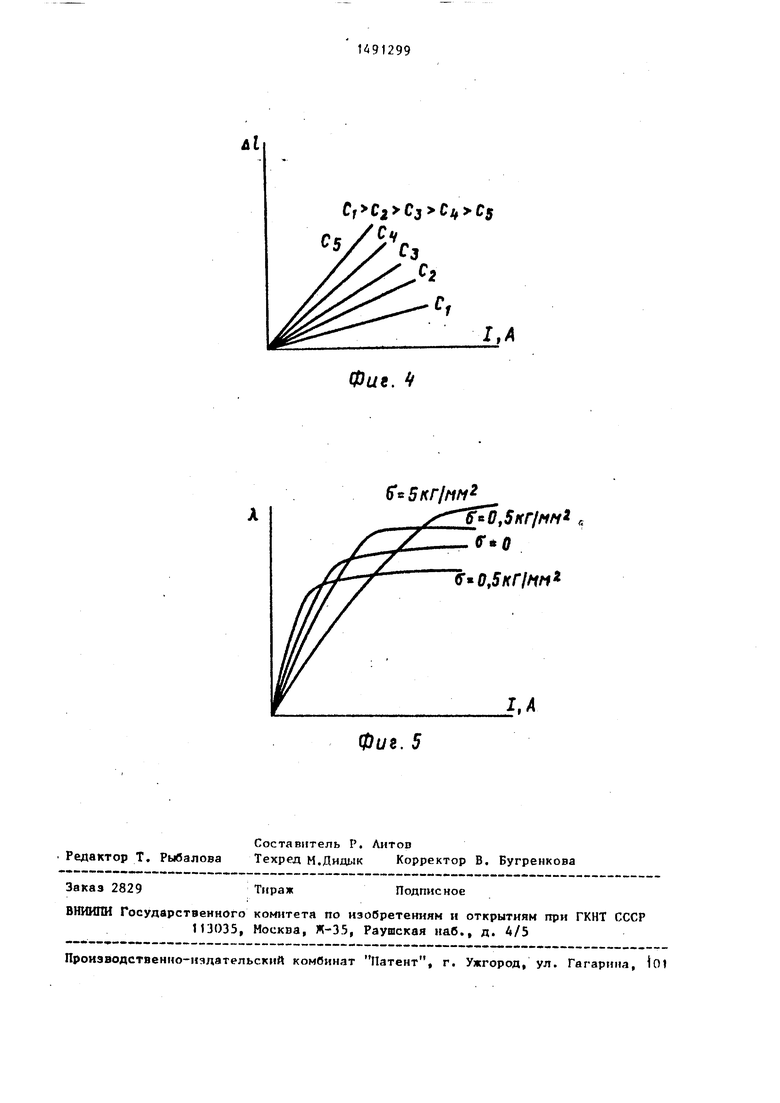
На фиг.1 изображен линейный шаговый двигатель с магнитострикщюнным движущим элементом и с упругой нагрузкой; на фиг.2 и 3 показаны временные диаграммы управляющих сигналов на зажимы и магнитострикиион- ный элемент при перемеще1ши нпгрузки вправо (три шага) влево (два тага) соответственно} на фиг.4 показаны нагрузочные характеристики Д
1/i
МП 1 ч И ГЖ ТТЧЯ МЯТ ИИГОг тр пк .1 о .ririu iiT.T ; H- i фиг .З 1г,1 руч ч. ;- I f-l 4CTtiKH (l) ii;n yiii .. i; i L --Ч М x , iiMcioimix рчтIII.IP К 14 и .
Лчит лл Г Г1. (:пц( ряп1т фмкслгоры 1 и 2 , Jinix . :u i nai HMT (v::трикщ1П}П11.и1 ,iuTffMn 1, Г оремеа тюицч упругую нагружу | 1 ииск11Щ1й обмотку илмагии- чипаипи 3. Н,1фиг.2и 3 позиципми 6 и 7 П(1к;1т 1иы упраплпюшие во:здемствия на чпжимы, а )ицией 8 управляющие во-)Л| йстпи( ля Л11нжуп51й элемент.Та- Koi i способ уирлиленмя CTpuKipioiiTibiM iiinroni.is JU tii пте.пем отличает трсбоваИИ - и: .;., fi Т Р ШП ЧЦ, ГПЫ ЛПГ ГТИ И
0|)|. I ). JI,. IV. I пин 11 path) ки злдлшюго
стр(ли гпо р.яоитает следуюиям (lOpa том.
Пусть надо отработать заданное rif prnoiuciiuft на несколько тагов н дрижуиу|й riju McHT вмиолнен из материала с Ш ложи гельиым мапштострик- iDKinHbPi riiJHi f -KTOM. В исходном состоянии оба зажима и дпижуп 1н элемент обесточены, при этом оба зажима фнксируют днижущий элемент. (
1ри сжатии упругой нагрузки ,т . с.
при перемещении ее йлепо, подают уп- рпилпюпюе liOTneiicTPue (импульс: тока) н обмотку дннжущего элемента, происходит накопление магнитострпк- unoiiHoi i де(5)ормаи;1и растяжегаш п движущем элементе между зажпмаг-от. Как только управляшгцее воздействие в обмотке д(зГ1жущего элемента достигает установитшегпся зна генип, при этом считаем, что и упругая деформация рпстяжения движущего элемента достигает устансч ипшегося значения, запитьнмкг ближний к нагрузке ЗсЗжим При 3rt h 11агруз};л перемещается на один (1ГЧ обратного хода движу- |дего :и эчег. нга. Далее фиксируют .у:цил . ЛОГИКИ г ближним зажимом, обосточип li .T оСмотку движущего элемента ч од(..1 рсиенно запитыиают вто 1 ) 4.|1,м и i iiicnpyroT его при вос- стлнорленяи п. -рнонлчальньгх размеров . MPir га .
Пути ра ,-.-| ЛАспчи нагрузки, при пе- p(45ei;ipunti pf: , подают управляющее нозлеист iiHi: на движущиП элемент с одн(;ргем1:аикм оспобоящением дальнего от ни рузки зажима и н момент до1:тижеиии ста нопияшегося значе П1я t,lr 1 ито1:трик иионнгчЧ деформа1р1И рас
9
тяженир фиксирунгг его. Далее обес- точинак1Т обмотку дпижущег о магнито- стрикционног 0 элемента и в момент достижения устанорипшегрся значет1Я мат-иитострикционной пеформащш сжатия освобождают ближний к нагрузке зажим, п результате чего происходит перемещение на|-рузки, и фиксируют
ближний зажим. Отработки шагов продолжаются до тех пор, пока перемеще- пие до заданного зпаче1шя станет меньше величины uiai-a, осуществляемого движущим элементом. Тогда определяют нагрузочную характеристику и по ней корректируют управляющее воз- дейстппе движущет о элемента и отрабатывают отшсанным выше способом
последний таг. I
Таким образом, предлагаемый способ управления линейным шаговым двигателем позволяет перемещать упругую нагрузку без обратного хода стрикююнного элемента, что попыша- ет точность и плавность отработки шага перемещения при условии надеж-- ных зажимов, не вносящих погрешность в перемещение нагрузки, а введение корректировки управляющего
воздействия по предварительно определенной нагрузочной характеристике стрик1у1онпого элемента позволяет отработать последш1й шаг с высокой точностью перемеще1П1я. Шагание с
максимальнЕ 1М шагом перемещения и точной отработкой последнего шага позволяет добиться высокого быстродействия двигателя при отработке заданпого перемещения. При этом двигатель экономичен в энергопотреблении, так как управляющие воздействия поступают на него лишь при отработке заданного шага перемещения.
Формула изобретения
1. Способ управления линейным шаговым двигателем путем последовательной коммутации двух зажимов и
подачи управляющего воздействия на движущий стрикш1онный элемент,о т- л и чающийся тем, что, с повышения эффективности работы привода )ш упругую нагрузку в
системах с обратной связью, при одинаковом знаке требуемой деформации нагрузки и стрикционной деформации движущего стрикционного элемента подают упрапляющее воздействие на
стрикциоиныи элемент при тафиксиро- ванном ближнем и оспобождснном дял1,- нем от нагрузки -зажимах, при достижении установипшегося значения стрик ционной деформации фиксируют даль- Ш1Й зажим, далее сш1мают управляющее воздействие со стрикииониого элемента и в момент достижения установившегося значения деформации стриктдион кого элемента освобождают ближний зажим и порле перемещет1я нагрузки фиксируют его вновь и освобождают дальний зажим, а при противоположных знаках требуемой деформации упругой нагрузки и стрикционной деформации движущего стрик1дионного элемента подают управляющее воздействие на двигающий стрикционный элемент при зафиксированных зажимах, в момент достижения установившегося значения стрикционной деформации ос1299
побождают ближний к нагрл чкр зля Ям, по::ле перомешенип нпт-ру и фикги- руют его спора, С11им т№т уир/ичтшну шее воздействие со стрикцигнпюго 5
элемрнта и одновр менно освобождают
дальний зажим и после восстановления первоначальных размеров стрик11ио но- го элемента фиксируют его вновь.
2. Способ ПОП.1, отличаю- щ и и с я тем, что, с целью повышения точности отработки заданного перемеще10 я, при достижении пере- мещет1я; отличающегося от заданного меньше, чем на величину шага,вводят корректировку управляющего воздействия по предварительно определенной нагрузочной характеристике стрик- ционного элемента и отрабатывают последний uiar скорректированной величиной управляющего воздействия.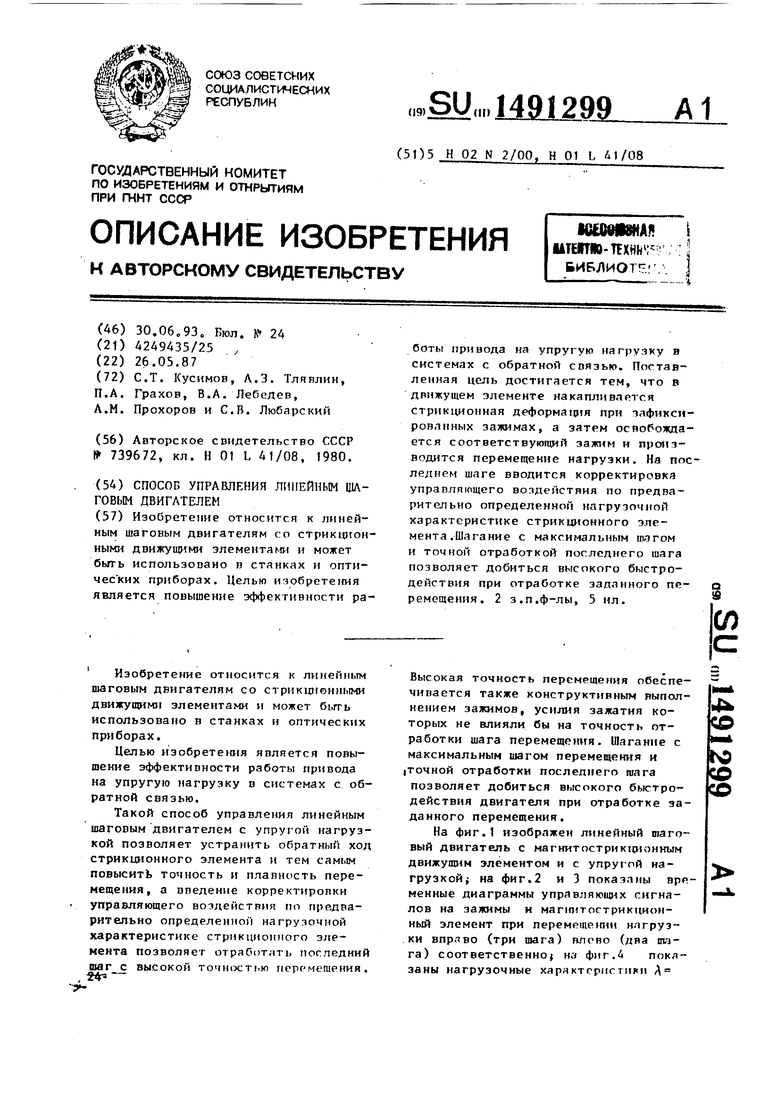
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления линейным шаговым двигателем | 1987 |
|
SU1542375A1 |
| Способ управления магнитострикционным шаговым исполнительным устройством | 1988 |
|
SU1616488A1 |
| Магнитострикционный шаговый двигатель линейных перемещений | 1986 |
|
SU1369619A1 |
| ЛИНЕЙНЫЙ СТРИКЦИОННЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1982 |
|
RU1111649C |
| Магнитострикционный шаговый двигатель | 1980 |
|
SU835287A1 |
| СПОСОБ УПРАВЛЕНИЯ СТРИКЦИОННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1989 |
|
SU1734556A1 |
| Шаговый привод малых угловых перемещений | 1980 |
|
SU920903A1 |
| ШАГОВЫЙ СТРИКЦИОННЫЙ ДВИГАТЕЛЬ И СПОСОБ ЕГО РАБОТЫ | 2020 |
|
RU2746793C1 |
| Шаговый привод для малых перемещений | 1976 |
|
SU612075A1 |
| Магнитострикционный шаговый двигатель угловых перемещений | 1982 |
|
SU1091792A1 |
Изобретение относится к линейным шаговым двигателям со стрикцяон- ными движущими элементаг1и и может быть использовано в станках и оптических приборах. Целью изобретения является повышение эффективности работы привода на упругую нагрузку в системах с обратной связью. Поставленная цель достигается тем, что в движущем элементе накапливается стрик1щонная деформация при зафиксированных зажимах, а затем освобожпа- ется соответствующий зажим и производится перемещение нагрузки. На последнем шаге вводится корректировка управляющего воздействия по предварительно определенной нагрузочной характеристике стрикционного элемента .Шагание с максимальным шагом и точной отработкой последнего шага позволяет добиться высокого быстродействия при отработке заданного перемещения. 2 з.п.ф-лы, 5 ил. СЛ
//VVV/XX/r/VV /X TTZ/y/VVV
5J
Фиг. 1
ж
Фиг. 2
Фиг. Л
Редактор Т. Рыбалова
Составитель Р. Литов
Техред М.Дидык Корректор В. Бугренкова
Заказ 2829
Тираж
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фие.
SKrjMM
DtSKr/M/i r.
( «(,5/(Г/АГ/
I, A
фиг. 5
Подписное
| Способ управления линейным шаговым приводом | 1978 |
|
SU739672A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
