Фие1
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического вождения хлопкоуборочных машин.
Целью изобретения является упрощение устройства и повышение его надежности.
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - установка устройства на машине.
Устройство состоит из источника имв результате чего получаем /-ю координату середины междурядья. Сумматор 7 суммирует результаты деления 0;, поступающие на его вход с делителя 6, 2х pasil(Ha выходе сумматора 7 получаем сумму 2 О,
0 координат середины междурядья за число опросов ЛФСЗС, равное 2К. Путем отбрасывания к-младших разрядов числа |Г О, (что соответствует делению на 2) ходе сумматора 7 получим число ОсР, пульсов и формирователя сигналов вожде- 10 отражающее усредненную координату сере- ния, содержащих оптический блок 1, фор-дины междурядья на участке хлопкового
мирователь видеосигнала 2 на линейнойполя за число опросов ЛФСЗС, равное 2х.
Число Оср с выхода сумматора 7 поступает на вход узла сравнения 8, который сравнивает ЭТО ЧИСЛО С ЧИСЛОМ Озад, ОТрЭЖЗЮщим искусственную координату середины междурядья, и выдает величину рассогласования 6 (Озад-Оср) между ними в двоичном коде и знак рассогласования в завифоточувствительной схеме с зарядовой связью (ЛФСЗС), усилитель-преобразователь аналогового сигнала 3, первый сумматор 4, второй сумматор 5, делитель 6, третий сумматор 7, узел сравнения 8.
Чувствительная область ЛФСЗС располагается перпендикулярно продольной оси машины, направлению движения машины, расположению хлопковых рядов.
Устройство установлено так, что на чувствительный слой ЛФСЗС с помощью оптического блока 1 проецируется линия сканирования, расположенная перпендикулярно хлопковым рядам, длиной см при высеве хлопка с расстоянием междурядий см. При движении машины линия сканирования перемещается, т.е. устройством сканируется участок хлопкового поля размером 2dxt.
симости от величины числа Оср, отработкой 20 которых исполнительный механизм возвращает машину к положению, когда 5 0, т.е. когда усредненная координата середины междурядья и координата искусственной середины совпадают.
25
Формула изобретения
Устройство для автоматического вождения хлопкоуборочной машины, содержащее источник импульсов в виде пере
Устройство работает следующим образом. 30 Дающеи телевизионной камеры и формироОптический блок 1 проецирует участок хлопкового поля на чувствительную область ЛФСЗС формирователя видеосигнала 2, на выходе которого получается ана- логово-дискретный сигнал (фиг. За), отражающий расположение раскрытых хлопковых коробочек. Этот сигнал поступает на вход усилителя-преобразователя 3, усиливающего сигнал и преобразующего его в двухуровневый цифровой сигнал (фиг. 36), который подается на входы сумматоров 4 и 5. Сумматор 4 представляет собой накап ливающий сумматор порядковых номеров i импульсов двухуровневого цифрового сигнала, сумматор 5 - сумматор общего числа А, импульсов того же сигнала. Сумма Z, (при А, 1) порядковых номеров импульсов с сумматора 4 и сумма НА, общего числа импульсов с сумматора 5 поступают на делитель 6, выполняющий операцию деления суммы порядковых номеров импульсов на сумму общего числа импульсов, т.е.
2,/S/l(0,
вятель сигналов вождения, отличающееся гем, что, с целью упрощения устройства и повышения его надежности, источник импульсов выполнен в виде оптического блока, формирователя видеосигналов на линейной
35 фоточувствительной схеме с зарядовой связью и усилителя-преобразователя аналогового сигнала в двухуровневый цифровой, при этом формирователь сигналов вождения содержит три накапливающих сумматора делитель и узел сравнения, причем выход
40 усилителя-преобразователя аналогового сигнала в двухуровневый цифровой соединен с входами первого и второго накапливающих сумматоров, а выходы последних - с соответствующими входами делителя, выход которого соединен с информационным входом третьего сумматора, причем выход третьего сумматора соединен с входом узла сравнения, кроме того, управляющий выход формирователя видеосигналов подключен к входам сброса сум50 маторов, делителя и узла сравнения формирователя сигналов вождения.
45
в результате чего получаем /-ю координату середины междурядья. Сумматор 7 суммирует результаты деления 0;, поступающие на его вход с делителя 6, 2х pasil(Ha выходе сумматора 7 получаем сумму 2 О,
щим искусственную координату середины междурядья, и выдает величину рассогласования 6 (Озад-Оср) между ними в двоичном коде и знак рассогласования в зависимости от величины числа Оср, отработкой 0 которых исполнительный механизм возвращает машину к положению, когда 5 0, т.е. когда усредненная координата середины междурядья и координата искусственной середины совпадают.
Формула изобретения
Устройство для автоматического вождения хлопкоуборочной машины, содержащее источник импульсов в виде пере
вятель сигналов вождения, отличающееся гем, что, с целью упрощения устройства и повышения его надежности, источник импульсов выполнен в виде оптического блока, формирователя видеосигналов на линейной
5 фоточувствительной схеме с зарядовой связью и усилителя-преобразователя аналогового сигнала в двухуровневый цифровой, при этом формирователь сигналов вождения содержит три накапливающих сумматора делитель и узел сравнения, причем выход
0 усилителя-преобразователя аналогового сигнала в двухуровневый цифровой соединен с входами первого и второго накапливающих сумматоров, а выходы последних - с соответствующими входами делителя, выход которого соединен с информационным входом третьего сумматора, причем выход третьего сумматора соединен с входом узла сравнения, кроме того, управляющий выход формирователя видеосигналов подключен к входам сброса сум0 маторов, делителя и узла сравнения формирователя сигналов вождения.
5
У «.
V
s
/УМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения хлопкоуборочной машины | 1989 |
|
SU1681749A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2003 |
|
RU2249841C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2279118C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2255853C1 |
| Устройство для автоматического вождения хлопкоуборочной машины | 1989 |
|
SU1658851A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2263021C1 |
| Устройство контроля полноты сбора хлопка-сырца | 1988 |
|
SU1564250A1 |
| Устройство для определения процента сбора хлопка-сырца | 1990 |
|
SU1750474A1 |
| Устройство контроля полноты сбора хлопка-сырца | 1989 |
|
SU1667126A1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2003 |
|
RU2246799C1 |

Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического вождения хлопкоуборочных машин. Цель изобретения - упрощение устройства и повышение его надежности. Устройство состоит из источника импульсов и формирователя сигналов вождения, содержащих оптический блок 1, формирователь видеосигнала 2, усилитель-преобразователь 3, три накапливающих сумматора 4, 5, 7, делитель 6 и узел сравнения 8. Оптический блок 1 проецирует участок поля на формирователь видеосигнала 2, на выходе которого появляется аналогово-дискретный сигнал, отражающий расположение раскрытых хлопковых коробочек. Этот сигнал через усилитель-преобразователь 3 поступает на вход формирователя сигналов вождения, выдающего по результату обработки полученного сигнала величину и направление отклонения хлопкоуборочной машины от заданного направления движения. 2 ил.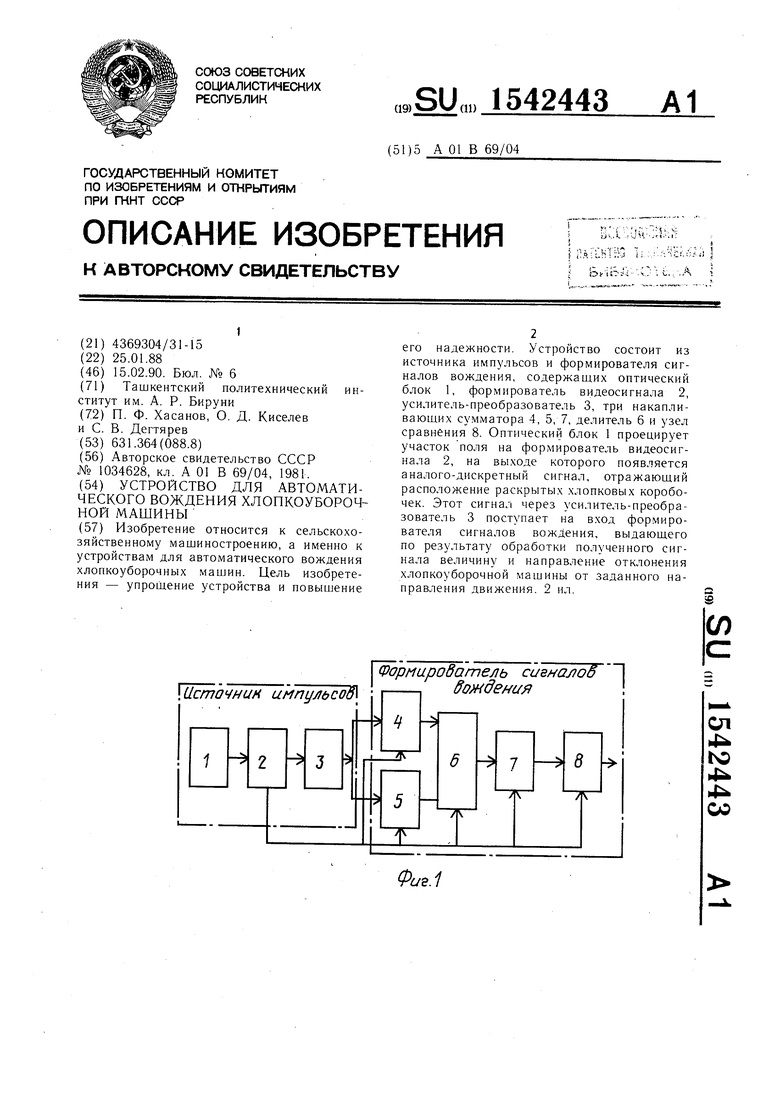
(риг. 2
| Устройство для автоматического вождения сельскохозяйственных агрегатов | 1981 |
|
SU1034628A1 |
