Фи9.
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического вождения хлопкоуборочных машин.
Недостатком известных устройств является сложность вследствие наличия таких блоков, как первый и второй накапливающие сумматоры и схема давления, требующих большого числа логических элементов (микросхем)- регистров, сумматоров, мультиплексоров, ППЗУ.
Цель изобретения - упрощение устройства.
На фиг.1 приведена структурная схема предлагаемого устройства; на фиг.2 - установка устройства на машине: а - вид слева; б - вид сверху; на фиг.З - эпюры работы устройства.
Устройство состоит из источника импульсов и формирователя сигналов вождения (показаны пунктиром), содержащих оптический блок 1, служащий для согласования размеров участка хлопкового поля и чувствительной области линейной фоточувствительной схемы с зарядовой связью, формирователь 2 видеосигнала, выход которого соединен с входом усилителя-преобразователя 3, счетчик 4 первого числа и счетчик 5 второго числа, входы которых соединены с выходом усилителя-преобразователя 3, инвертор 6, вход которого соединен с выходом счетчика 4 первого числа, а выход инвертора 6 и выход счетчика 5 второго числа соединены с соответсвующи- ми входами сумматора 7, выход которого соединен с входом накапливающего сумматора 8, узел 9 сравнения, вход которого соединен с выходом накапливающего сумматора 8.
Чувствительная область линейной фоточувствительности схемы с зарядовой связью располагается перпендикулярно продольной оси машины, направлению движения маши ны, расположению хлопковых рядов,
Устройство установлено так, что на чувствительный слой линейной фоточувствительной схемы зарядовой связью с помощью оптического блока 1 проецируется линия сканирования, расположенная перпендикулярно хлопковым рядам, длиной см при высеве хлопка с расстоянием междурядий см. При движении машины линия сканирования перемещается, т.е. устройством сканируется участок хлопкового поля размером 2dxl.
В основу определения координаты середины междурядья положены соответственное распределение раскрытых хлопковых коробочек по хлопковым рядам и
контрастность хлопка-сырца по отношению к остальным элементам хлопкового поля.
Принцип действия устройства основан на преобразовании распределения освещенности по линии сканирования, несущего информацию о расположении раскрытых хлопковых коробочек по этой линии, в электрический сигнал цифрового вида, вычислении координаты середины междурядья за
одно сканирование, усреднении полученной координаты на участке хлопкового поля длиной I и определении величины рассогласования сравнением усредненной координаты с координатой Искусственной
середины.
Устройство работает следующим образом.
Оптический блок 1 проецирует участок хлопкового поля на чувствительную область
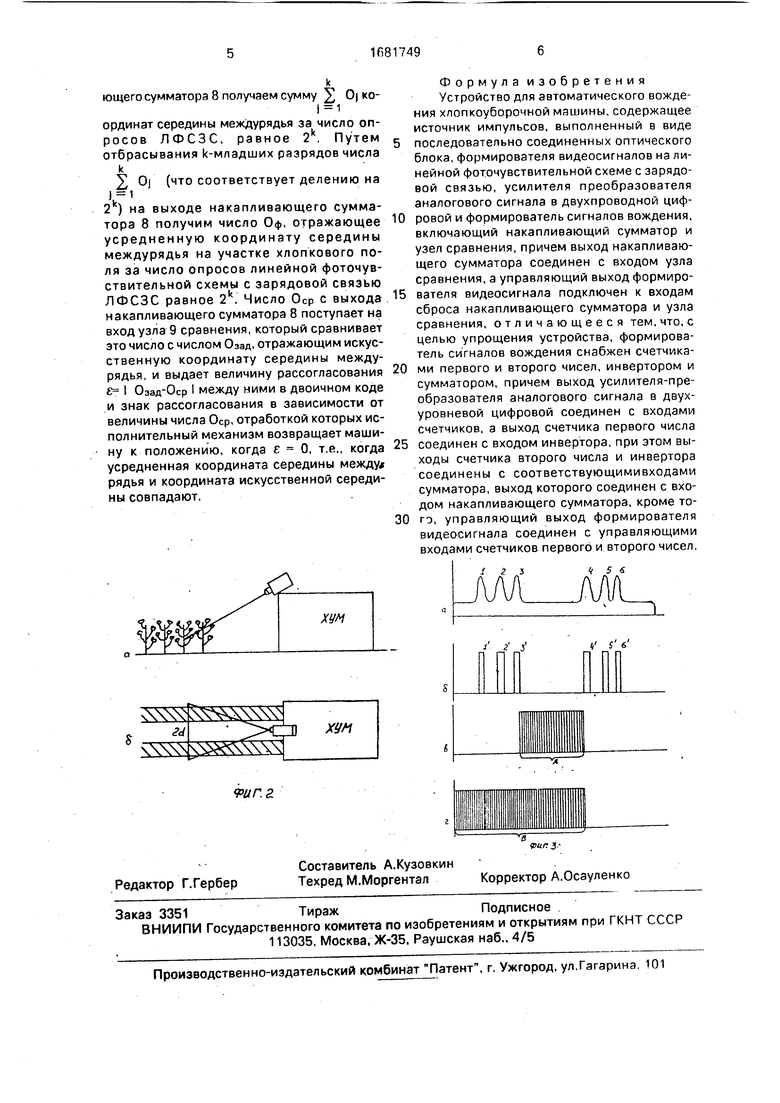
линейной фоточувствительной схемы с зарядовой связью формирователя 2 видеосигнала, на выходе которого получается аналогово-дискретный сигнал (фиг.З,а), отражающий расположение раскрытых хлопковых коробочек (импульсы 1-3 соответствуют коробочкам левого хлопкового ряда, импульсы 4-6 - коробочкам правого хлопкового ряда). Этот сигнал поступает на вход усилителя-преобразователя 3, усиливающего сигнал и преобразующего его в двухуровневый цифровой сигнал (фиг.З,б), который подается на входы счетчика 4 первого числа и счетчика 5 второго числа. Счетчик 4 первого числа подсчитывает число (фиг.З,в), соответствующее расстояние между последней хлопковой коробочкой левого ряда (фиг.З,б, импульс 3 ) и первой хлопковой коробочкой правого ряда (фиг.З,б, импульс 4) по данной линии сканирования. Счетчик 5 второго числа подсчитывает число (фиг.З,г), соответствующее расстоянию от начала сканирования до первой хлопковой коробочки правого ряда (фиг.З,б, импульс 4 ) по данной линии сканирования. Таким образом, j-я координата середины междурядья определяется как ,0 В+(В-А)
Деление числа А на 2 осуществляется путем отбрасывания одного младшего разряда. Число А/2 через инвертор 6 и число В поступают на соответствующие входы сумматора 7, где число В складывается в дополнительном коде с инверсным А/2, что соответствует вычитанию. В результате получаем j-ю координату середины междурядья Qj B-A/2. .
Накапливающий сумматор 8 суммирует результаты QJ, поступающие на его вход ( сумматора 7, 2k раз. На выходе накаплива
k ющего сумматора 8 получаем сумму О) ко1 1
ординат середины междурядья за число опросов ЛФСЗС, равное 2k. Путем отбрасывания k-младших разрядов числа k
У О) (что соответствует делению на
2 ) на выходе накапливающего сумматора 8 получим число Оф, отражающее усредненную координату середины междурядья на участке хлопкового поля за число опросов линейной фоточувствительной схемы с зарядовой связью ЛФСЗС равное 2k, Число 0Ср с выхода накапливающего сумматора 8 поступает на вход узла 9 сравнения, который сравнивает это число с числом Озад. отражающим искус- ственную координату середины междурядья, и выдает величину рассогласования Ј I Озад-Оср I между ними в двоичном коде и знак рассогласования в зависимости от величины числа 0Ср, отработкой которых исполнительный механизм возвращает машину к положению, когда Е 0, т.е., когда усредненная координата середины между/ рядья и координата искусственной середины совпадают.
Формула изобретения Устройство для автоматического вождения хлопкоуборочной машины, содержащее источник импульсов, выполненный в виде
последовательно соединенных оптического блока, формирователя видеосигналов на линейной фоточувствительной схеме с зарядовой связью, усилителя преобразователя аналогового сигнала в двухпроводной цифровой и формирователь сигналов вождения, включающий накапливающий сумматор и узел сравнения, причем выход накапливающего сумматора соединен с входом узла сравнения, а управляющий выход формирователя видеосигнала подключен к входам сброса накапливающего сумматора и узла сравнения, отличающееся тем, что. с целью упрощения устройства, формирователь сигналов вождения снабжен счетчиками первого и второго чисел, инвертором и сумматором, причем выход усилителя-преобразователя аналогового сигнала в двухуровневой цифровой соединен с входами счетчиков, а выход счетчика первого числа
соединен с входом инвертора, при этом выходы счетчика второго числа и инвертора соединены с соответствующимивходами сумматора, выход которого соединен с входом накапливающего сумматора, кроме того, управляющий выход формирователя видеосигнала соединен с управляющими входами счетчиков первого и второго чисел
1 2 S 6
-} J
if 5 б 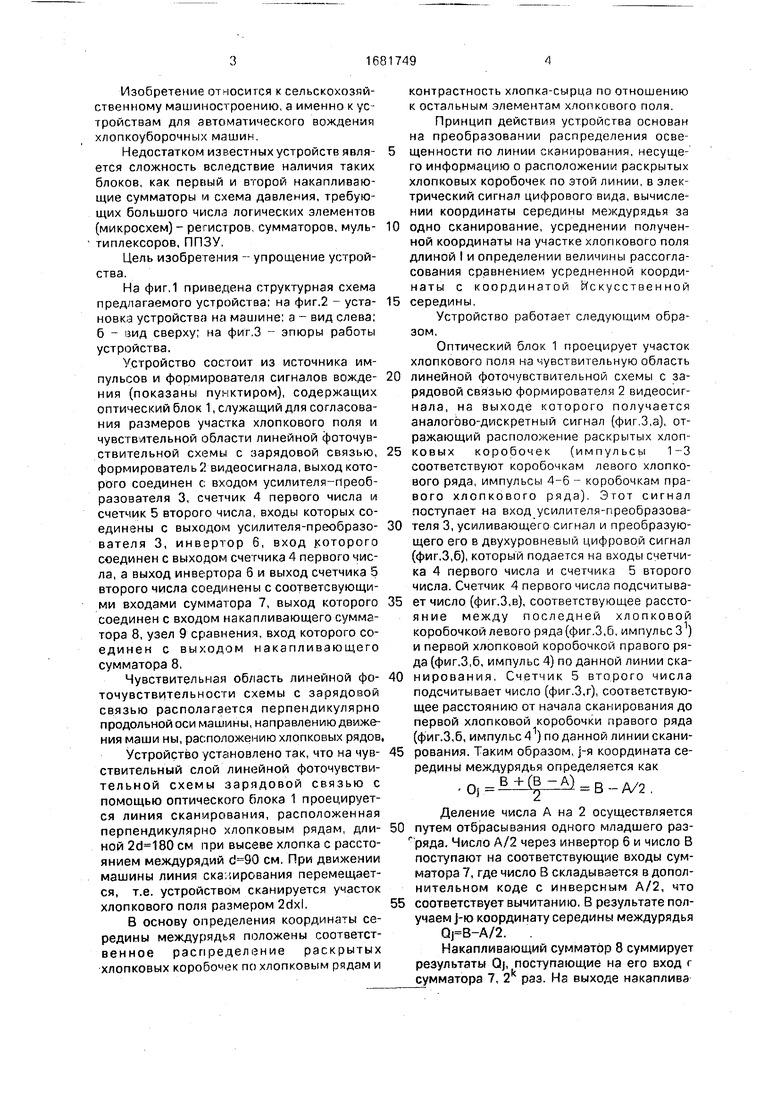
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения хлопкоуборочной машины | 1988 |
|
SU1542443A1 |
| Устройство контроля полноты сбора хлопка-сырца | 1988 |
|
SU1564250A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2003 |
|
RU2249841C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2279118C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2263021C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2255853C1 |
| Устройство контроля полноты сбора хлопка-сырца | 1989 |
|
SU1667126A1 |
| Устройство для определения процента сбора хлопка-сырца | 1990 |
|
SU1750474A1 |
| Устройство для автоматического вождения хлопкоуборочной машины | 1989 |
|
SU1658851A2 |
| Устройство для считывания изображений | 1983 |
|
SU1104554A1 |
Изобретение относится к селЈскохозяй- ственному машиностроению, а именно к устройствам для автоматического вождения хлопкоуборочных машин. Цель изобретения - упрощение устройства. Устройство содержит источник импульсов и формирователь сигналов вождения. Источник импульсов состоит из последовательно соединенных между соббй оптического блока 1, формирователя видеосигналов на линейной фоточувствительной схеме с зарядовой связью 2, усилителя-преобразователя аналогового сигнала в двухуровневый цифровой Формирователь сигналов вождения состоит из счетчика 4 первого числа А, счетчика 5 второго числа В, инвертора 6, сумматора 7, накапливающего сумматора 8, узла 9 сравнения. Источник импульсов выдает двухуровневый цифровой сигнал, отражающий расположение раскрытых хлопковых коробочек, который поступает в формирователь сигналов вождения, выполненный в виде схемы определения координаты середины междурядья и выдающий по результату обработки полученного сигнала величину и направления отклонения хлопкоуборочной машины от заданного направления движения. Сигнал рассогласования поступает на исполнительный механизм, осуществляющий поворот переднего колеса в зависимости от величины знака рассогласования. 3 ил. (Л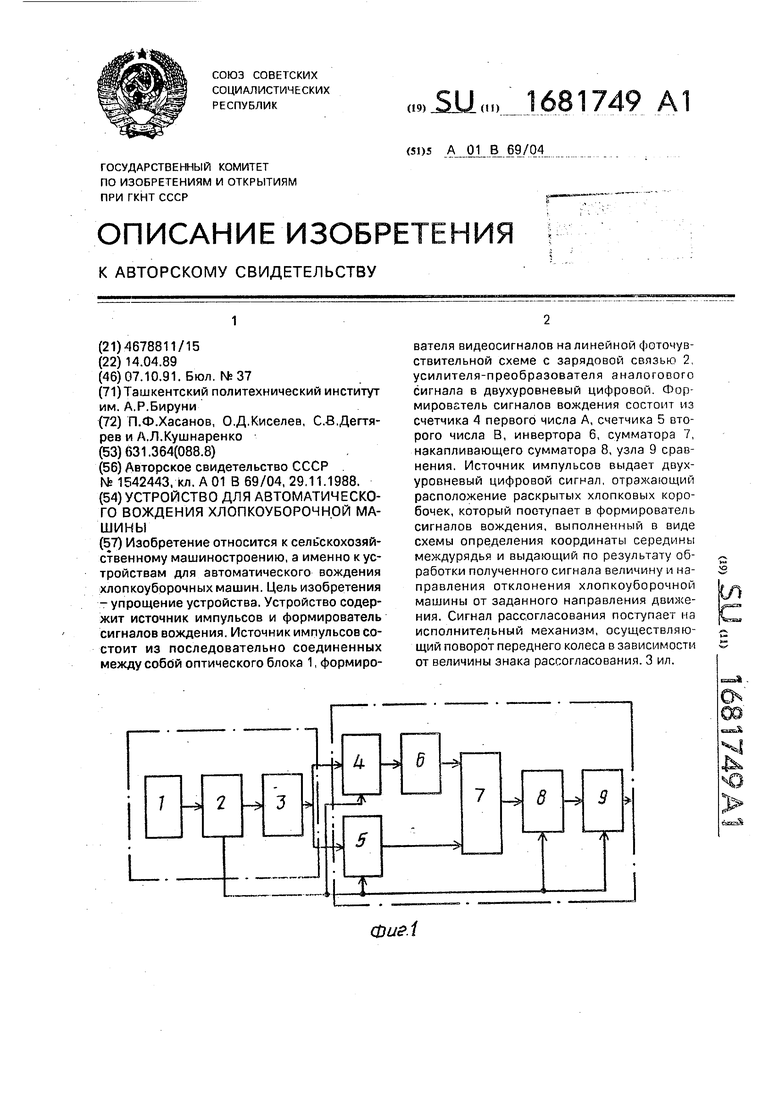
| Устройство для автоматического вождения хлопкоуборочной машины | 1988 |
|
SU1542443A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
