Изобретение относится к вычислительной технике и может быть использовано в специализированных аналоговых и гибридных устройствах для получения оценок состояния при решении задач навигации, радиолокации, траек- торных измерений и восстановления сигналов.
Цель изобретения - повьппение точности фильтрации.
На чертеже приведена структурная схема регуляризованного фильтра Кал- мана.
Устройство содержит вьгчитатель 1,
to
посылает сигнал на размыкание цепи на управляющий вход коммутатора 4, при этом второй вход второго сумматора обнуляется. Таким образом, в процессе решения задачи фильтрации коммутатор 4, то соединяет вход второго сумматора 5 с выходом усилителя 3 (если невязка больше G ), то обнуляет его (если невязка меньшее) При этом весь участок решения разбивается на ряд интервалов в общем случае неравной длительности с постоянным значением решения на каждом интервале, т.е. решение получается в
первый сумматор 2, усилитель 3, ком- 5 виде кусочно-постоянной функции времутатор 4, второй сумматор 5, интегратор 6, генератор 7 случайного процесса, блок 8 сравнения, первый матричный умножитель 9, блок 10 определения дисперсии и второй матричный умножитель 11.
Устройство работает следующим образом.
На первый вход вычитателя 1 поступает многомерньй сигнал Z(t), на второй вход - сигнал H(t)x(t) с выхода второго матричного умножителя . 11 (где H(t) - модуляционная матри ца X(t) - выходной многомерньй сигнал фильтра). На входе вычитателя 1
мени. Подобньй принцип определения коэффициента усиления K(t) усилитеОСг
ля наряду с регуляризацией характеризует быструю сходимость и соответ20 ственно устойчивость регуляризованно го решения Xj(t). Данный алгоритм повьш1ения стабильности и точности фильтра связан с совместным действием двух подходов к устранению рас25 ходимости фильтра Калмана: уменьшени матричных коэффициентов усиления уси лителя 3 за счет введения к элементам матрицы некоторой добавки в виде регуляризующего оператора обЕ; ог-
30 раничение дисперсии ошибок за счет
образуется невязка E(t)Z(t)-H(t)X(t), введения в схему блока 10 определеК невязке добавляется случайный процесс (t) от генератора 7. В усилителе 3 происходит усиление сигнала с коэффициентом усиления ). Входной сигнал Z(t) поступает на вход блока 10 определения дисперсии этого сигнала. С выхода блока 10 опрё- делейия дисперсии сигнал, иропорцио- нальньй величине дисперсии шума входного сигнала G .jj поступает на первьй вход блока 8 сравнения, на второй вход блока сравнения поступает сигнал, пропорциональный невязке E(t). Если в процессе | ешения абсолютная величина невязки решаемого уравнения E(t) на выходе вычитателя 1 оказьюается больше G , то с выхода блока 8 сравнения сигнал поступает на замыкание коммутатора 4, а выход усилителя 3 соединяется с входом второго cyNiMaTopa 5. При этом рассогласование между Z(t) .и X(t)H(t) отрабатывается с малой постоянной времени и величина невязки на выходе первого сумматора 2 уменьшается. Как только невязка становится меньше G-, , блок 8 сравнения
посылает сигнал на размыкание цепи на управляющий вход коммутатора 4, при этом второй вход второго сумматора обнуляется. Таким образом, в процессе решения задачи фильтрации коммутатор 4, то соединяет вход второго сумматора 5 с выходом усилителя 3 (если невязка больше G ), то обнуляет его (если невязка меньшее). При этом весь участок решения разбивается на ряд интервалов в общем случае неравной длительности с постоянным значением решения на каждом интервале, т.е. решение получается в
мени. Подобньй принцип определения коэффициента усиления K(t) усилитеОСг
ля наряду с регуляризацией характеризует быструю сходимость и соответственно устойчивость регуляризованного решения Xj(t). Данный алгоритм повьш1ения стабильности и точности фильтра связан с совместным действием двух подходов к устранению расходимости фильтра Калмана: уменьшение матричных коэффициентов усиления усилителя 3 за счет введения к элементам матрицы некоторой добавки в виде регуляризующего оператора обЕ; ог-
раничение дисперсии ошибок за счет
, введения в схему блока 10 определения дисперсии, блока 8 сравнения и коьсмутатора 4. Подобные меры предотвращают расходимость фильтра повьш1ают
35 его точность, сохраняя свойства оптимальности регуляризованного фильтра, накладьшают ограничения на выбор параметра регуляризации oi,. Коэффициент усиления усилителя 3 находится
40 в данном случае по формулам:
Kjt)V,s(t)H(t) V(t)+eiE ; (1)
45 ilMLl F(t)V(t)+V.,(t)F (t) - d
-V(t)H (t) V, (t)+ «, H(t)Vy(t) V
50
+G(t)v(t:)G(t);(2)
E(t) + 2(t),(3)
E(t)
1екторный случайный
napajiieTp, значения которого необходимо оценить;
ошибка;
(f) (t) -матричный умножитель ковариационной матрицы произвольного шума;
и (t) - матричный умножитель ковариационной матрицы белого шума; F(t),G(t)- матричные умножители; V(t)-вектор шума произвольного шума; W(t)-вектор белого шума; . W(t) - выходной сигнал генератора 7 случайного сигнала;
Е ,(t) - выходной сигнал-первого сумматора 2,
Параметр регуляризации определяетя по невязке:
||z(t)-H(t)x(t)
Регуляризованный фильтр, содержащий вычитатель, вход которого является входом фильтра, а выход подключен ко входу первого сумматора, соединенного вторым входом с выходом генератора случайного процесса, а выходом со входом усилителя, второй сумматор, подключенный, выходом ко входу интегратора-, выход которЬго .является выходом фильтра и через первый и второй матричные умножители соединен соответственно со входом второго, сумматора и вторым входом выС усилителя 3 сигнал подается на В горЪй вход сумматора 5, на первый вход которого подается сигнал предсказания F(t)X ,(t) от первого матрич- - читателя, отличающийся
(Х
ного умножителя 9. С выхода второго тем, что, с целью повьшгения точности сумматора 5 сигнал поступает на вход фильтрации, в него введены коммута- интегратора 6, на выходе которого об- тор, блок сравнения и блок определе- разуется искомая оценкания дисперсии, подключенный входом
30 к входу фильтра, а выходом - к вхрX(t) J (F(t) X (t)+K,j(t)Ejj(t)cJt, ду блока сравнения, второй вход кото
рого соединен с выходом вычитателя.
На выходе второго сумматора образуется дифференциальная оценка
. dMt) dt
F(t)X(t)+K(t)E(t),
Составитель В„ Башкиров Редактор Л. Пчелинская Техред М.Ходанич Корректор А. Ильин
Заказ 2434/54 Тираж 901Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Применение предлагаемого регуля- ризованного фильтра Калмана позволяет повысить точность фильтрации в результате улучшения сходимости и ус- тойчивости фильтра, которые достигаются путем уменьшения матричных коэффициентов усиления и ограничения дисперсии шума входного сигнала,
Формул а изобретения
Регуляризованный фильтр, содержащий вычитатель, вход которого является входом фильтра, а выход подключен ко входу первого сумматора, соединенного вторым входом с выходом генератора случайного процесса, а выходом со входом усилителя, второй сумматор, подключенный, выходом ко входу интегратора-, выход которЬго .является выходом фильтра и через первый и второй матричные умножители соединен соответственно со входом второго, сумматора и вторым входом вы
читателя, отличающийся
а выход - с управляюпщм входом коммутатора, подключенного информацион- ным входом к выходу усилителя, а выходом - к второму входу второго сумматора.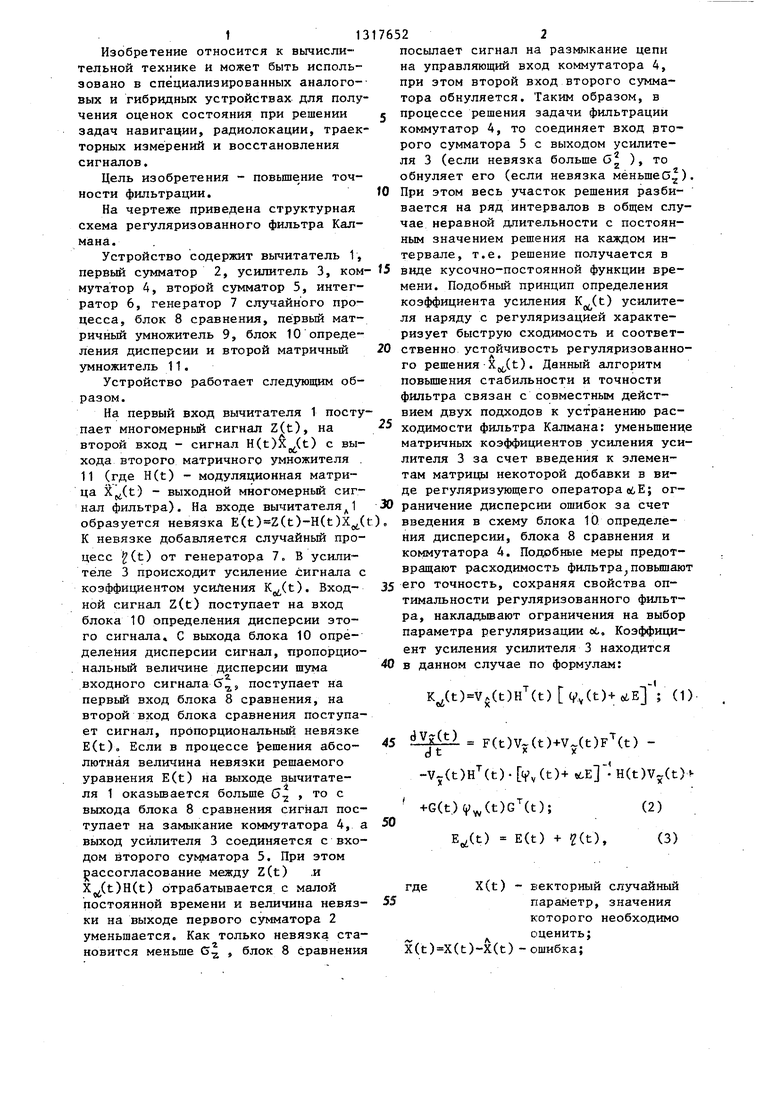

| название | год | авторы | номер документа |
|---|---|---|---|
| Регуляризованный фильтр Калмана | 1989 |
|
SU1651355A1 |
| Регуляризованный фильтр Калмана | 1987 |
|
SU1434540A2 |
| Регуляризованный фильтр Калмана | 1983 |
|
SU1166275A2 |
| Регуляризованный фильтр | 1990 |
|
SU1739482A1 |
| Модифицированный фильтр Калмана | 1986 |
|
SU1434539A1 |
| МОДИФИЦИРОВАННЫЙ ФИЛЬТР КАЛМАНА | 1992 |
|
RU2160496C2 |
| Двумерный фильтр | 1988 |
|
SU1555829A1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С КОРРЕКТИРУЕМЫМ ФИЛЬТРОМ | 1999 |
|
RU2156477C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С АДАПТИВНЫМ ФИЛЬТРОМ | 1998 |
|
RU2148836C1 |
| Устройство для экстраполяции | 1983 |
|
SU1107137A1 |
Изобретение относится к вычислительной технике и может быть использовано в специализированных аналоговых и гибридных устройствах для получения оценок состояния при решении задач навигации, радиолокации, траек- торных измерений и восстановления сигналов. Цель изобретения - повьше- ние точности фильтрации. Регуляризо- ванный фильтр Калмана содержит вычи- татель 1, первый сумматор 2, усилитель 3, второй сумматор 5, интегратор 6, генератор 7 случайного процесса, первый матричньй умножитель 9, второй матричный умножитель 11. Цель изобретения достигается за счет введения коммутатора 4, блока 8 сравце- ния и блока 10 определения дисперсии. 1 ил.
| Регуляризованный фильтр Калмана | 1982 |
|
SU1056432A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
