Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано для автоматизации технологических процессов.
Цель.изобретения - расширение технологических возможностей и повышение производительности путем обеспечения квазипрямолинейного перемещения схвата в рабочей зоне.
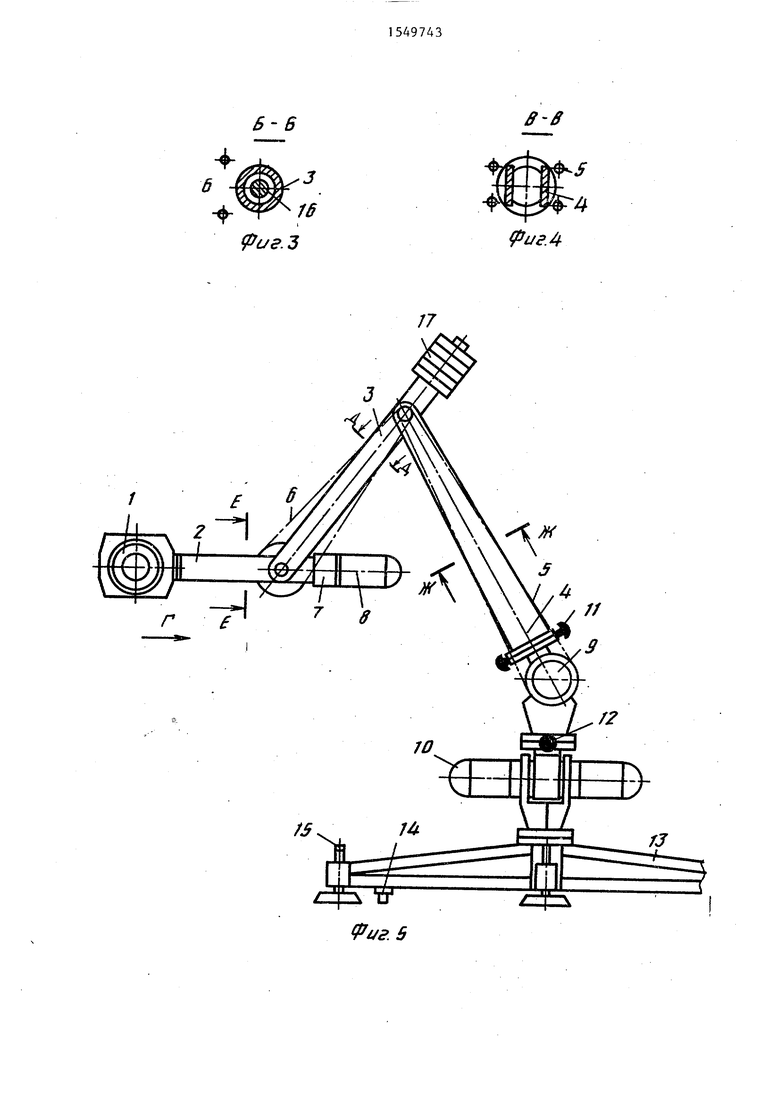
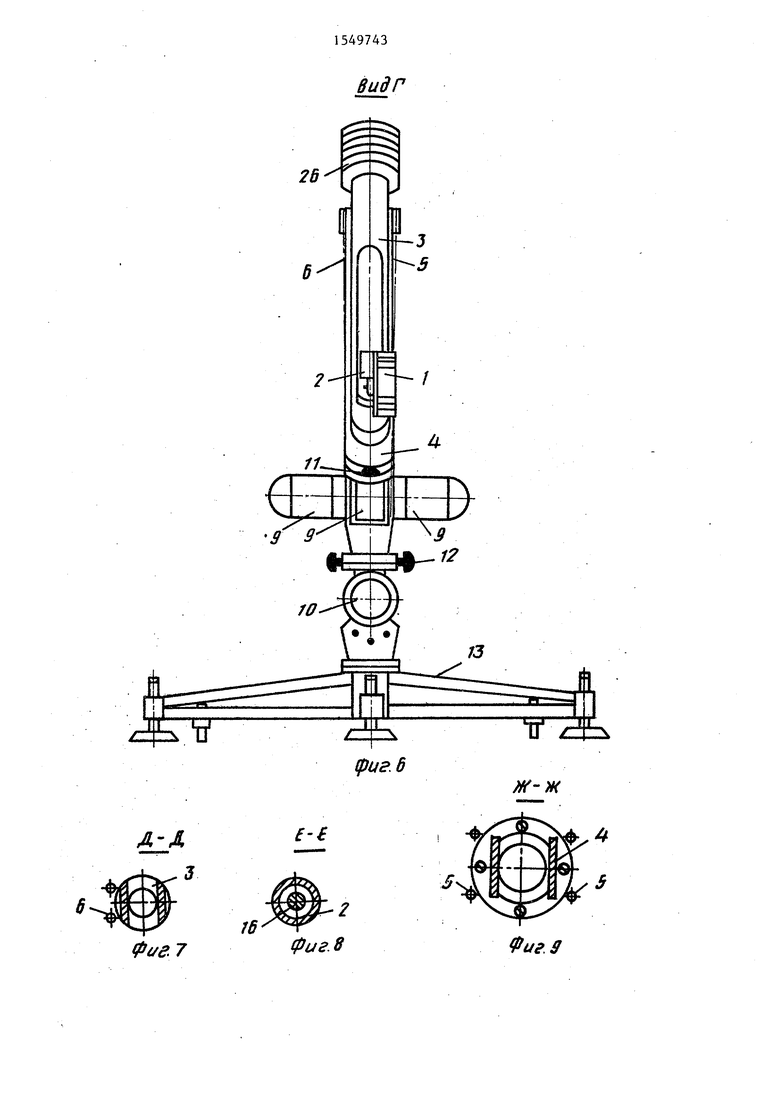
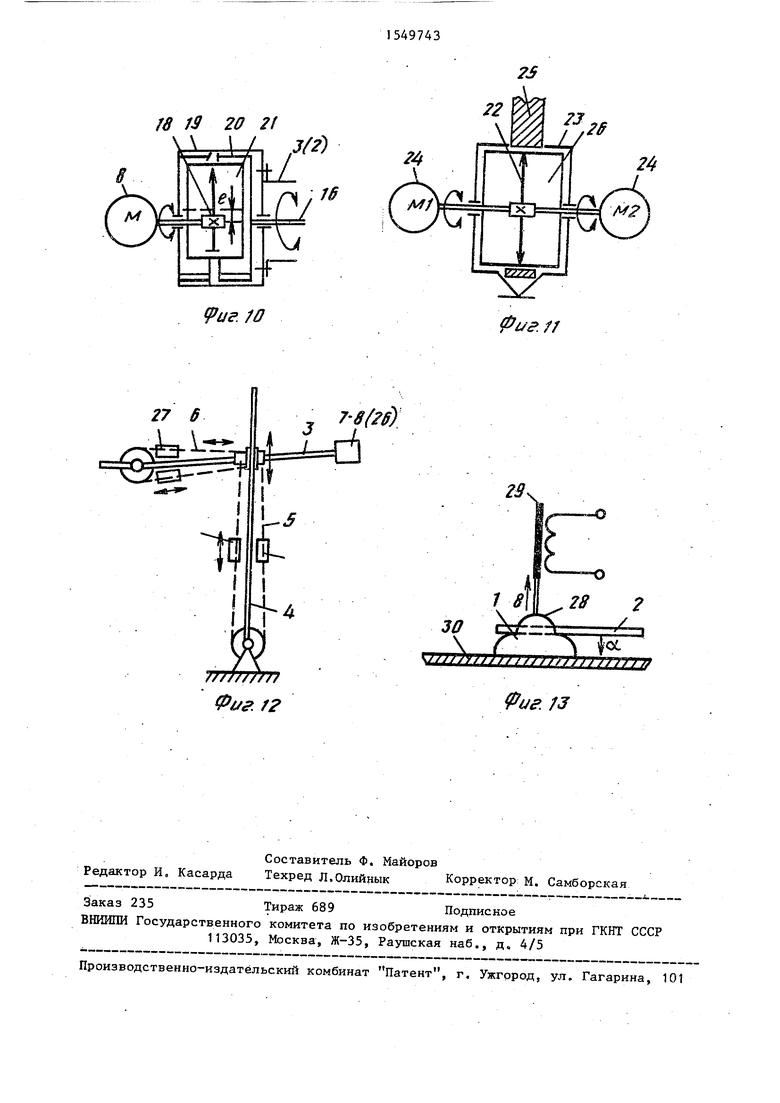
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - манипулятор с противовесом, общий вид; на фиг.6- вид Г на фиг. 5; на фиг. 7 - разрез Д-Д на фиг. 5; на фиг. 8 - разрез по Е-Е на фиг. 5; на фиг. 9 - разрез по Ж--Ж на фиг. 5; на фиг. 10 - кинематическая схема волновой зубчатой передачи; на фиг.-11 - кинематическая схема шарниров; на фиг. 12 - кинематическая схема манипулятора, перестраиваемого под нужный типораз- -мер стеклоизделий; на фиг. 13 - схема схвата
Манипулятор для плоских стеклоиз- делий (фиг, 1 и 2) имеет пневмовакуумный схват 1, механизм плоского шарнирного трехзвенника, состоящий из третьего 2, второго 3 и первого 4 звеньев с кинематическими гибкими связями 5 и 6 соответственно. Звено 4 соединено со звеном 3 посредством связи 5 с передаточным отношением i.,2s 3,- а звено 3 - со звеном 2 связью 6 с передаточным отношением (l-i). Привод поворота схвата содержит зубчатую передачу 7 и двигатель 8. Этот привод установлен жестко на торце звена 3 трехзвенника со- осно на таком удалении от общей вращательной пары первого 4 и второго 3 звеньев в сторону, обратную от третьего звена 2 трехзвенника, чтобы
5
0
5
0
5
0
5
0
5
уравновесить массы схвата 1, второго 3 и третьего 2 звеньев.
Между звеном 4 и основанием установлен блок из двух шарниров 9 и 10 с приводами их поворота. При этом оси вращения шарниров расположены в параллельных плоскостях под углом 90° друг к другу. Шарниры 9 и 10 снабжены демпферами 11 и 12 соответственно. Шарнир 10 закреплен на основании 13, которое включает четыре роликовых катка 14 и четыре чашечных упора 15. Второе звено 3 трехзвенника имеет трубчатое сечение.
Вращательная пара, установленная на третьем звене 2, выполнена в виде полой шарнирной вилки} внутри которой расположен вал 16, связанный с схва- том 1. Звено 4 трехзвенника (фиг. 4) имеет в нижней части также трубчатое сечение, а в верхней - в форме вилки,
Целесообразно общую вращательную пару первого и второго звеньев трехзвенника изготовить в виде шарнирных параллелограммов с изменяемой длиной сторон для переналадки перекладчика при смене типоразмеров стеклоизделий, т.е. изготовить регулируемыми с помощью фиксируемых винтовых пар или поступательных пар скольжения-, а кинематические связи1 выполнить соответственно з указанных отношениях 2,3: :1 и (l-i-1j:l.
Схват I оснащен системой прямых и обратных клапанов, вакуумной камерой и магистралью, которая связывает захват с источником вакуума (не показано) , Схват I и звенья 4-2 оборудованы системой обратных связей (не показано), например герконовыми реле, а звенья 4-2 корпуса шарниров 9 иг 10, основание 13 и линия обработки кромок стеклоизделий в зоне рабочих операций содержат ответную систему воздействия по положению на
обратную связь, например постоянные магниты с позиционной регулировкой.
Возможно изготовление манипулятора с приводом поворота, включающим передачу 7 и электродвигатель 8, рас положенным на торце звена 2 (фиг.5). В этом случае звенья 3 и 4 имеют форму вилок (фиг. 6, 7, 9) для свободного перемещения в них звень.ев 2 и 3 и привода вращения схвата, который в этом случае устанавливается на звене 2 с возможностью свободного прохода в звеньях 3 и 4, а отношение длины звена 3 к длине звена 4 равно 0,65: 1. На звене 3 крепится противовес 17
Передача 7 (фиг. 10) включает генератор 18 волн, корпус 19 с жестким зубчатым венцом, ведомое звено 20 с жестким зубчатым венцом и ведущее звено 21 с эксцентриситетом е. Шарниры 9 и 10 (фиг. 11) включают генератор 22 волн, корпус 23 с двумя жесткими зубчатыми венцами, электродвигатели 24, водило 25, связанное со звеном 4, и гибкое зубчатое колесо 26.
Манипулятор, перестраиваемый на требуемый типоразмер (фиг. 12), содержит нерегулируемые поступательные пары 27, например винт с фиксируемой гайкой. Схват 1 выполнен в виде присоски с подвижным дном 28, которое деформируется под действием якоря электромагнита 29 (фиг, 13). Позицией 30 обозначен объект манипулирования.
Манипулятор работает следующим образом.
После строгого позиционирования с помощью основания-позиционера и системы обратной связи, например rep- коновых реле с постоянными магнитами по отношению к линии обработки кро
0
5
0
5
мок система обратной связи останавливает шарнир 9 и вновь включает в сторону прямого вращения двигатели шарнира 10. С включением двигателей шарнира 10 от устройства управления блокировочной системой включается в прямом направлении и привод вращения схвата. При этом схват J со стек- лоизделием описывает дугу с углом перекладки в сторону правого технологического конвейера с одновременным разворотом вокруг своей оси на угол
ротации, в частном случае около 170°. i
Ограничение углов перекладки и ротации осуществляется обратной связью по положению, например, системой герконовых реле модуля перекладки и ротации. Сигналами этой системы останавливаются привод вращения схвата 1 и шарнир 10 и затем включается шарнир 9 в сторону обратного вращения для извлечения изделия.
Схват 1 со стеклоизделием входит в зону правого технологического конвейера линии обработки кромок, и под действием обратной связи, например, герконовых реле, и механического воздействия со стороны линии обработки кромок на обратные клапана (концевые выключатели электромагнита 29) схвата 1, шарнир 9 останавливается, а схват 1 освобождается от стеклоизделия. При этом блокировочная система .(не показана) устройства управления последовательно включает шарнир 9 в прямом направ- лении, а привод вращения схвата и шарнир 10 - в обратном направлении. Свободный от стеклоизделия схват 1 выходит из рабочей зоны линии обработки кромок и совершает обратный
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир манипулятора Воробьева | 1984 |
|
SU1204375A1 |
| Рука манипулятора | 1987 |
|
SU1431924A1 |
| Сельскохозяйственный робот-комбайн | 2019 |
|
RU2728225C1 |
| Лесозаготовительная машина | 1983 |
|
SU1159515A1 |
| Автоматическая линия для сборки многослойных пакетов | 1974 |
|
SU500979A1 |
| Лесозаготовительная машина | 1980 |
|
SU935003A1 |
| Устройство для разработки лесосеки | 1989 |
|
SU1618341A2 |
| Линия для изготовления клееных деревянных конструкций | 1980 |
|
SU927500A1 |
| Устройство для перестановки стеклоизделий | 1980 |
|
SU937363A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
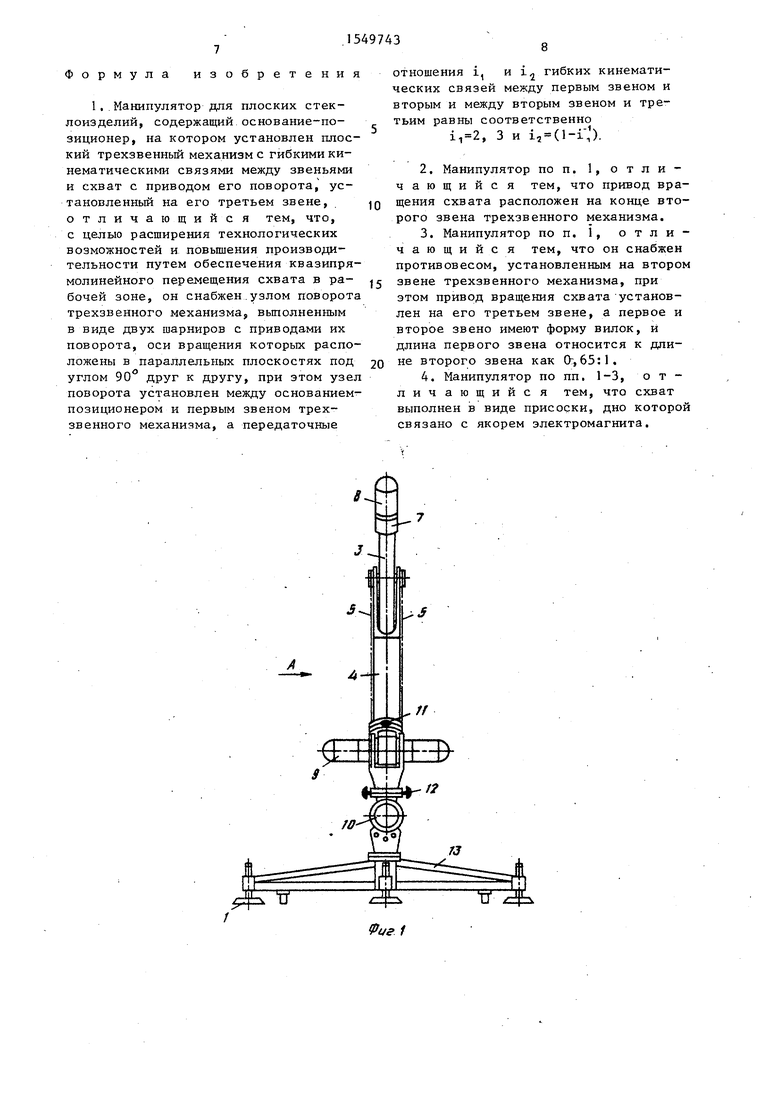
Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано для автоматизации технологических процессов. Целью изобретения является расширение технологических возможностей и повышение производительности путем обеспечения квазипрямолинейного перемещения схвата в рабочей зоне. Ориентация в пространстве схвата 1, расположенного на конце третьего звена плоского трехзвенного механизма с гибкими кинематическими связями между звеньями 2, 3 и 4, осуществляется приводом его поворота содержащим двигатель 8 с зубчатой передачей 7, и узлом, включающим шарниры 9 и 10 с приводами их поворота, оси вращения которых расположены в параллельных плоскостях под углом 90° друг к другу. При этом передаточные отношения I1 и I2 гибких кинематических связей между первым звеном и вторым и между вторым звеном и третьим равны соответственно I1=2,3 и I2=(1-I1). 3 з.п.ф-лы, 13 ил.
мок стеклоизделий на двигатели шарни- д разворот на угол ротации, в частном
ра 10 подают от управляющего устройства сигнал Вращение в сторону етеклоизделия, находящегося, наприч мер, на левом технологическом конвейере. При этом пневмовакуумный схват 1 при механическом контакте прямого клапана (или системы обратной связи) с изделием захватывает его-и подает сигнал от герконовых реле на останов шарнира 10 и пуск двигателей шарнира 9 в прямом направлении.
При выходе схвата 1 со стеклоиз- делием из зоны линии обр.аботки крослучае , с одновременным дви жением по дуге перекладки в сторону левого исходного технологического конвейера. Система обратной связи по
50 положению схвата и шарниров 9 и 10 управляет остановом схвата 1 и его движением в сторону поступившего оче редного стеклоизделия на левом технологическом конвейере линии обработ
55 ки кромок.
Аналогично перекладчик работает в случае обратной перекладки стекло- изделий .
случае , с одновременным дви жением по дуге перекладки в сторону левого исходного технологического конвейера. Система обратной связи по
положению схвата и шарниров 9 и 10 управляет остановом схвата 1 и его движением в сторону поступившего очередного стеклоизделия на левом технологическом конвейере линии обработки кромок.
Аналогично перекладчик работает в случае обратной перекладки стекло- изделий .
Формула изобретения
отношения 11 и
12 гибких кинематических связей между первым звеном и вторым и между вторым звеном и третьим равны соответственно
, з и 17-о-г|).
5 звене трехзвенного механизма, при этом привод вращения схвата установлен на его третьем звене, а первое и второе звено имеют форму вилок, и длина первого звена относится к дли0 не второго звена как 0, 65:1.
tr t
-fc
ВидГ
Фие.7
фиг.В
Фиг, 9
Г8 1 20 21
. Д #Я
i - /I
фиг. 1О
27 6
3 f
/777//////
#Мв Л
4
Риг. //
Jtf
J///
Г л.л..
f /7// / / / f /f / / f // /
7/
Фие.13
| Манипулятор | 1980 |
|
SU919804A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
