30
t.5
Фи.1
; Изобретение отнпсится к машино- Ьтрое.лию, а именно к испол штельным устройствам манипуляторов, предназначенных для переноса деталей на по зиции технологической обработки.
Цель изобретения - улучшение динамических характеристик при работе с грузами большой массы за счет повышения жесткости конструкции.
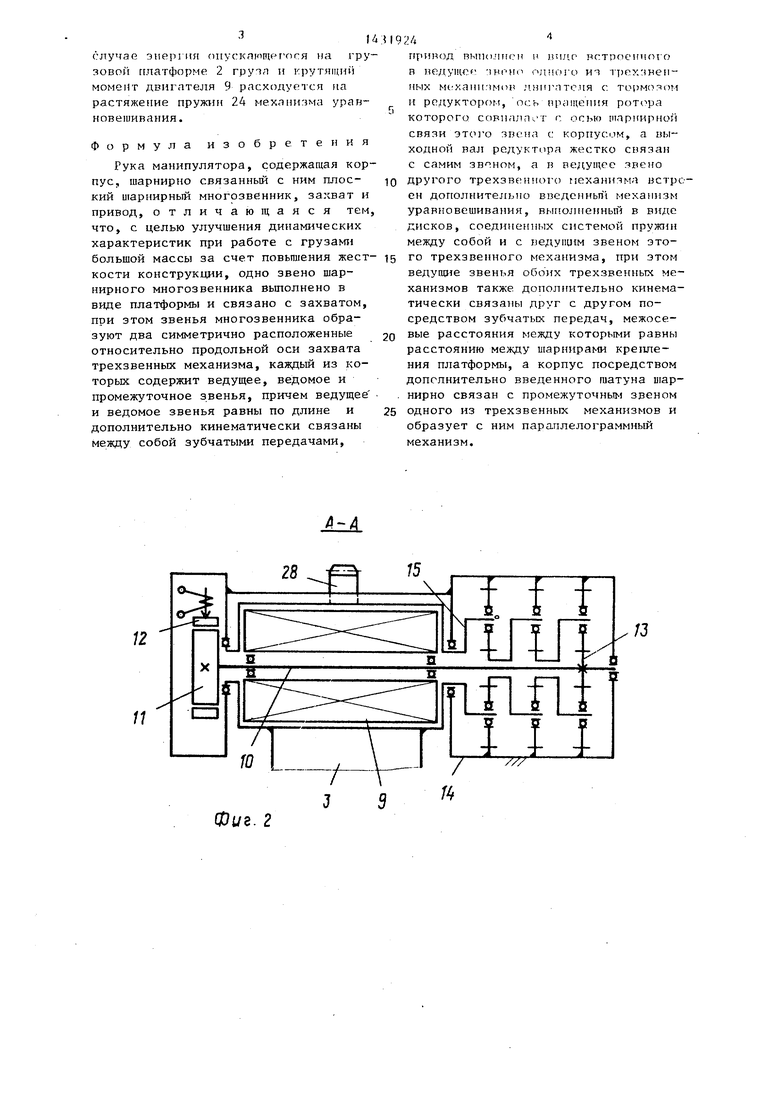
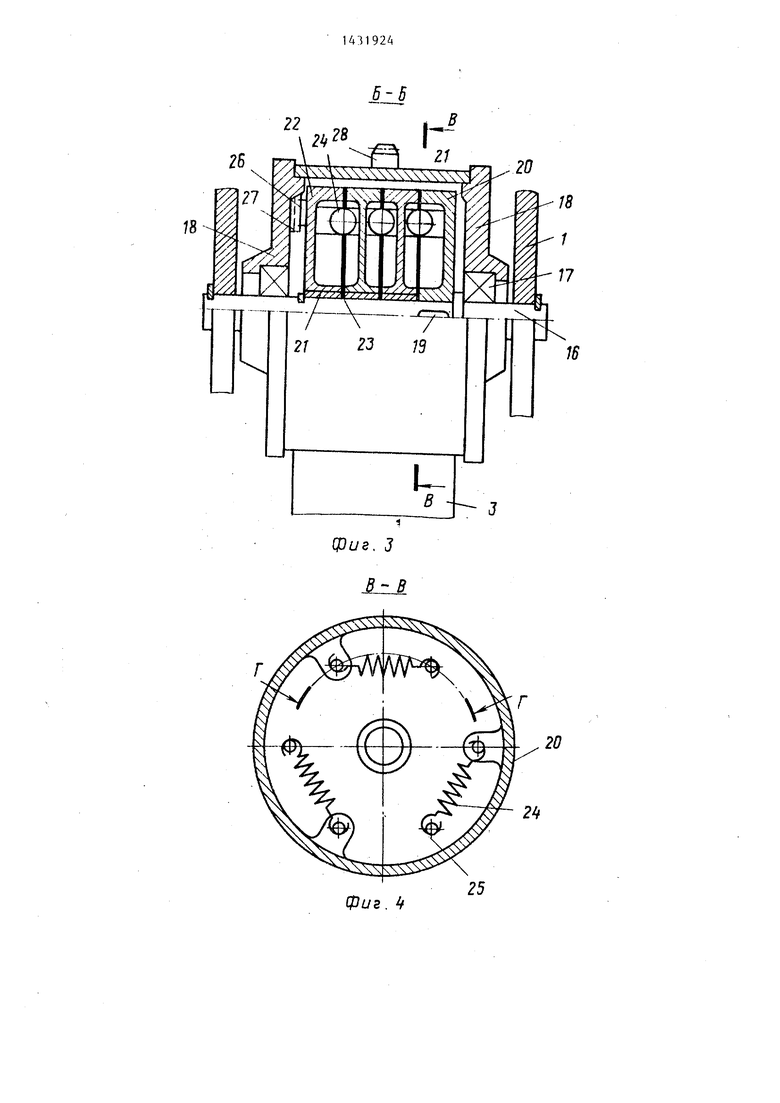
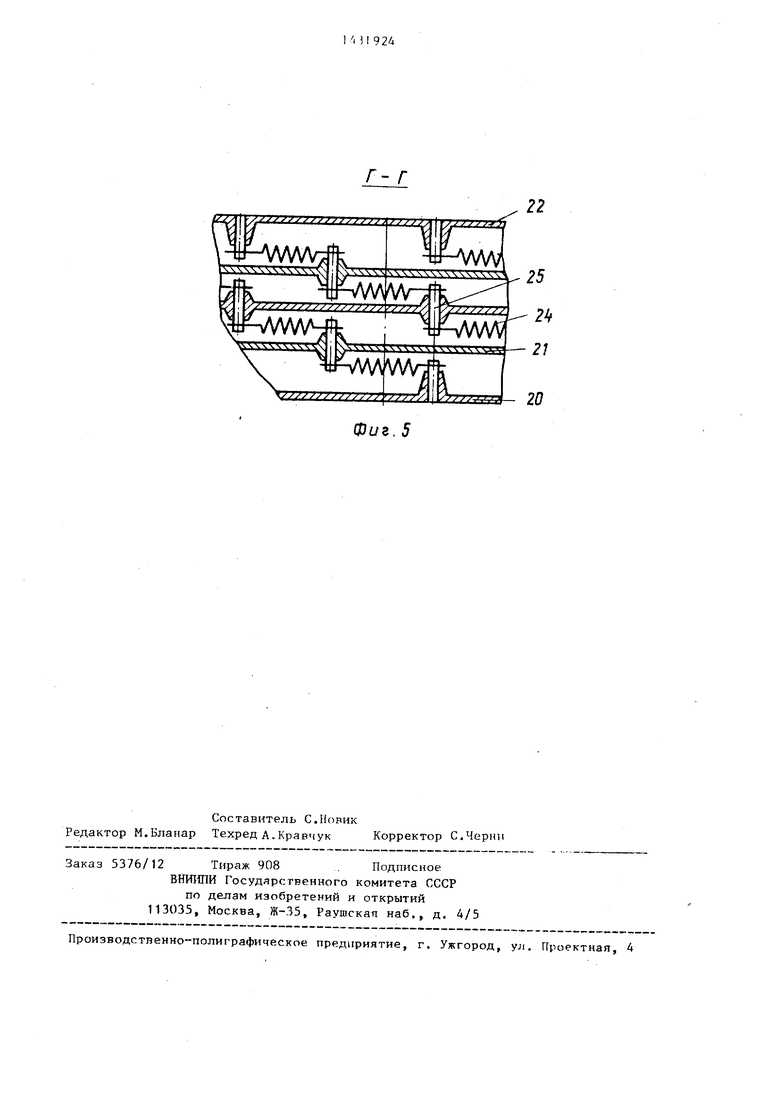
На фиг. 1 предста1злена кинематическая схема руки манипулятора; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 разрез В-Б на фиг.З; на фиг.З - раз- рез Г-Г на фиг.4,
- Рука манипулятора состоит из корпуса 1, грузовой платформы 2, предназначенной для крегшения захвата. 3еду11ще звенья 3, равные им по дли- не ведомые 4, а также промежуточные звенья 5 и 6 образуют два симметрично расположенных от вертикальной оси плоских трехзвеиных механизмов, дшр- мирно закрепленных относительно кор- иуса , Ведущие 3 и ведомые 4 звенья с:вяза11Ы одно с другим жестко прикреп ленпыми к ним зубчатыми секторами 7 и. 8. В ведуп(ее звено одного (правого трехзвснника встроен электродвига- тель 9, на валу 10 которого закреплены барабан 11 тормоза 12 и ведущая шестерня 13 редуктора 14, (в данном гфимере трехступенчатого планетарного редуктора). Выходной вал 15 редуктора 14 жестко соединен с г едущи;- звеном 3,
В ведущем звене 3 друг ого трех- звенника собран механизм уравновешивания, состоящгш из лсестко установленной в корпусе 1 оси 16, на которой на опорах 17 качения, размещенных в крышках 18, крепится само веду звено 3. Па оси 16 на шпонке 19 закреплен ведущий диск 20, а также на антифрикционных вту. с возможностью свободного вращения относительно оси 16 - промежуточные 21 и вЬкодной 22 диски механизма уравно- вешиваняя, между которыми установле- иь антифрикцио ные прокладки 23,
Диски соединены между собой по ,овательно с помодцяо пру- жнн 24, которые прикреплены к дискам на пальцах 25. Выходной диск 22 имее выступ 26, взаимодействующий с выступом 27 крышки 18, жестко соединенной с р,едуи1им звеном 3. Таким образом, с.иовое замь кание системы осу
Q
5
0 5 0
g
5
0
5
0
ществляется между г(еподвижным корпусом 1 и качагопшмся ведупщм звеном 3. Ведупд1е звенья обоих трехзвенников связаны между собой зубчатыьш секторами 28.
При зтом межцентровое расстояние этого зубчатого соединения равно расстоянию между шарнирами подвески грузовой платформы 2 к ведомым-звеньям 4.
К корпусу 1 на оси 29 прикреплен шатун 30, который вместе с ведущим звеном 3 и промежуточным звеном 5 образует шарнирный параллелограмм.
Рука манипулятора работает следующим образом.
Исходное положение - грузовая платформа 2 внизу. После подачи команды на перемещение электромагнит отпускает колодки тормоза 12 и освобождает барабан 11 вместе с валом 10 электродвигателя, что приводит к его включению. При зтом вала 10 через шестерню 13 передается на редуктор 14. Поскольку выходной вал 15 редуктора 14 жестко соединен с веДуидам звеном 3, последнее начинает вра1цать- ся относительно вала 10. Ведущее звено 3 через зубчатые секторы 28 вращает ведущее звено второго трехзвен- ника. Оно вращается на опорах 17 относительно оси 16 и корпуса 1. Через зубчатые секторы 7 и 8 вращаются ведомые звенья 4. В результате осуществляется подъем грузовой платформы 2 по прямолинейной траектории. В этом случае системы пружин 24 механизма уравновешивания помогает подъему платформы за счет того, что в исходном положении пружины 24 находятся в максимально растянутом состоянии и стремятся сжаться. При повороте ведущего звена 3 со встроенным механизмом уравновешивания происходит относительное угловое смещение дисков 21 и 22, за счет которого обеспечивается значительный рабочий ход пружинной системы при малом удлинении каждой прузкины.
После того как грузовая платформа 2 заняла верхнее положение, отключается двигатель 9, и колодки 12 тормоза фиксируют барабан 11 вместе с валом 10. Теперь рука находится в вepxнe., например, в транспортном положении.
Для опускания грузовой платформы 2 необходимо включить д.вигатель на обратное вращение пала И). В зтом
1
случае энергия онусклющег ося на грузовой платформе 2 гручл и крутящи момент двигателя 9 расходуется на растяжение пружин 24 механизма уран- новешивания.
Формула изобретения
Рука манипулятора, содержащая корпус, шарнирно связанный с ним плоский шарнирньй многрзвенник, захват и привод, отличающаяся тем, что, с целью улучшения динамических характеристик при работе с грузами большой массы за счет повьш1ения жесткости конструкции, одно звено шарнирного многозвенника выполнено в врще платформы и связано с захватом, при этом звенья многозвенника образуют два симметрично расположенные относительно продольной оси захвата трехзвенных механизма, каждый из которых содержит ведущее, ведомое и промежуточное з.венья, причем ведущее и ведомое звенья равны по длине и дополнительно кинематически связаны между собой зубчатыми передачами.
Д
привод выпо.плси и нилр нстросниого в ne/.tyiuo-f чнрио олмого ич гт)ех:)неи- ных М1-ханп.чм1Я лнигптепя с тормняом
и редукторг. м, ось пращения ротора
которого совпал-гк Т f. осью гпарииррюи
связи звена с корпусам, а ны- ходной вал редуктора жестко связан с самим звпном, а в ведущее звено
ДРУ1 ого трехзвенного пеханизма встрс- ен дополнительно введень ЬП1 механизм уравновешивания, выпoJПIeнный в виде дисков, соединенных системой пружин между собой и с ведущим звеном этого трехзвенного механизма, при этом ведущие звентлЯ oGoifx трехзвенных механизмов также дополнительно кинематически связаны друг с другом посредством зубчатых передач, межосевые расстояния между которыми равны расстоянию между шарнирами крепления платформы, а корпус посредством дополнительно введенного шатуна шар- нирно связан с промежуточным звеном
одного из трехзвенных механизмов и образует с ним параплелограммный механизм.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1151453A1 |
| Промышленный робот | 1989 |
|
SU1673428A1 |
| Захват | 1980 |
|
SU965764A2 |
| Манипулятор для плоских стеклоизделий | 1987 |
|
SU1549743A1 |
| Захват | 1972 |
|
SU440249A1 |
| Механизм поворота гусеничной машины | 1971 |
|
SU653162A1 |
| Механизм преобразования вращательного движения в сложные | 1989 |
|
SU1733776A1 |
| Механизм поворота шпиндельного барабана многошпиндельного токарного автомата | 1974 |
|
SU560731A1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| Захват манипулятора | 1980 |
|
SU973354A1 |
Изобретение относится к машиностроению, а именно к исполнительным- устройствам манипуляторов, предназначенных для,переноса деталей на позиции технологической обработки.Цель изобретения - улучшение динамическю; характеристик при работе с грузами большой массы за счет повьш ения жесткости конструкции. Команда на перемещение детали, расположен я off на платформе 2, поступает на электромагнит тормоза, которьй освобождает барабан, кинемати гески связанньй с одним ведущим звеном 3 одного трех- звенника. С него через звенья шарнирного многозвенника, состоящего из двух симметричных трехзвенников, движение передается платформе- 2, связанной с захватом. В ведущее звено 3 второго трехзвенника встроен уравновешивающшЧ механизм. 5 ил. (С (Л
А
12
11
QOi/8. 2
t t t
/3
flf
I I I
/7/
фиг. 420
Фиг. 5
| Манипулятор | 1985 |
|
SU1291386A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Манипулятор | 1982 |
|
SU1013259A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
