| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1981 |
|
SU1038219A1 |
| Манипулятор | 1981 |
|
SU971645A2 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022769C1 |
| Манипулятор | 1983 |
|
SU1186464A1 |
| Манипулятор | 1985 |
|
SU1269994A1 |
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ НОГИ И УСТРОЙСТВО ДЛЯ РЕАБИЛИТАЦИИ ХОДЬБЫ | 2020 |
|
RU2827729C1 |
| Устройство для неразрушающего контроля | 1985 |
|
SU1295324A1 |
| Судовое устройство для гидродинамических испытаний модели в открытом водоеме | 1978 |
|
SU712318A1 |
| АВТОМАТИЧЕСКОЕ ОРУЖИЕ- 3 /ВАРИАНТЫ/ | 2012 |
|
RU2517038C1 |
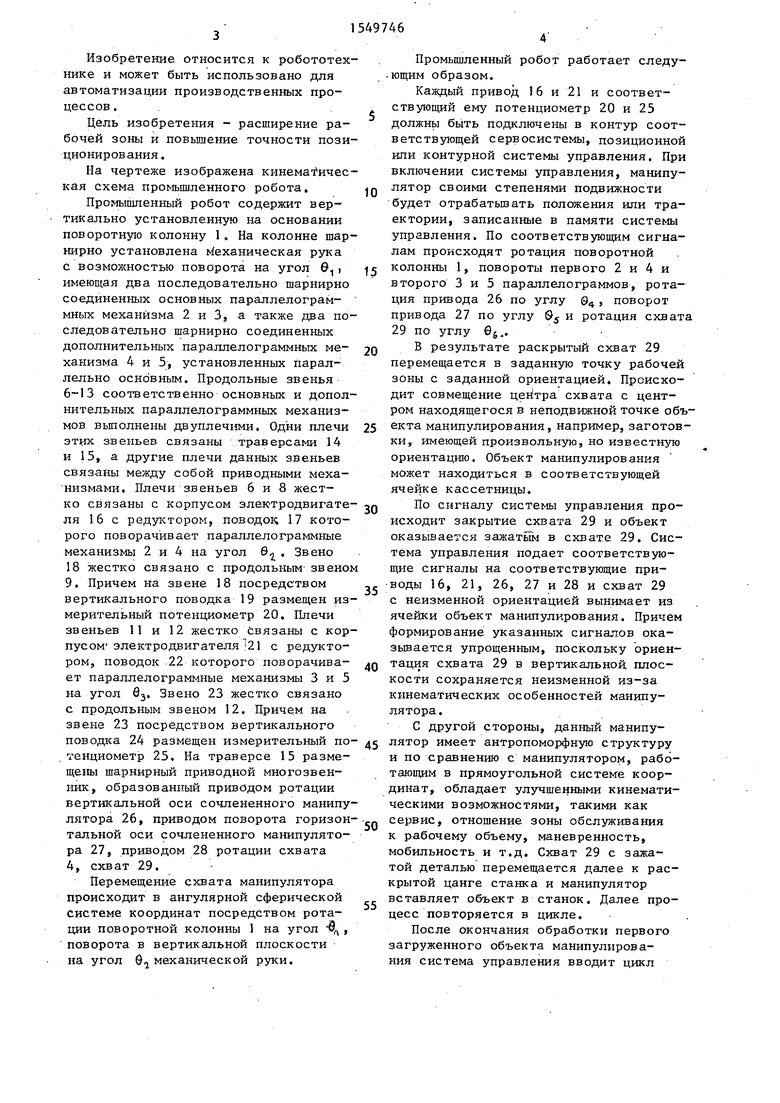
Изобретение относится к робототехнике и может быть использовано для автоматизации производственных процессов. Целью изобретения является расширение рабочей зоны и повышение точности позиционирования. Для этого на вертикальной поворотной колонне 1 установлена механическая рука с возможностью поворота на угол Ω1. Механическая рука имеет два последовательно шарнирно соединенных основных параллелограммных механизма 2 и 3, а также два установленных параллельно им последовательно шарнирно соединенных дополнительных параллелограммных механизма 4 и 5. Продольные звенья основных и дополнительных параллелограммных механизмов выполнены двуплечими. Одни плечи этих звеньев связаны траверсами 14 и 15, а другие плечи связаны между собой приводными механизмами. На траверсе 15 размещен шарнирный приводной многозвенник. 1 ил.
| Патент США № 3255893, кн | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
