Изобретение относится к манипуляторам, имеющим средства уравновеи ивания и может быть использовано в манипуляторах, обучаемых посредством ручного перемещения рабочего органа по требуе юй траектории. Из основного авт.св. N° известен манипулятор, содержаций механическую руку в виде шарнирно соединенных звеньев, одно из которых несет исполнительный орган, а другое связано с механизмом уравновешивания, выполненным в виде цилиндра, закрепленного вертикально на каретке, подвижной по горизонтальным направляющим, размещенным на основании в плоскости качания механической руки. Для обеспе чения уравновешивания цилиндр находит ся под постоянным давлением. При повороте звена с исполнительным органом механической руки, ее центр тяжести смещается относительно другого звена. Соответственно изменяется момент действия силы веса звена
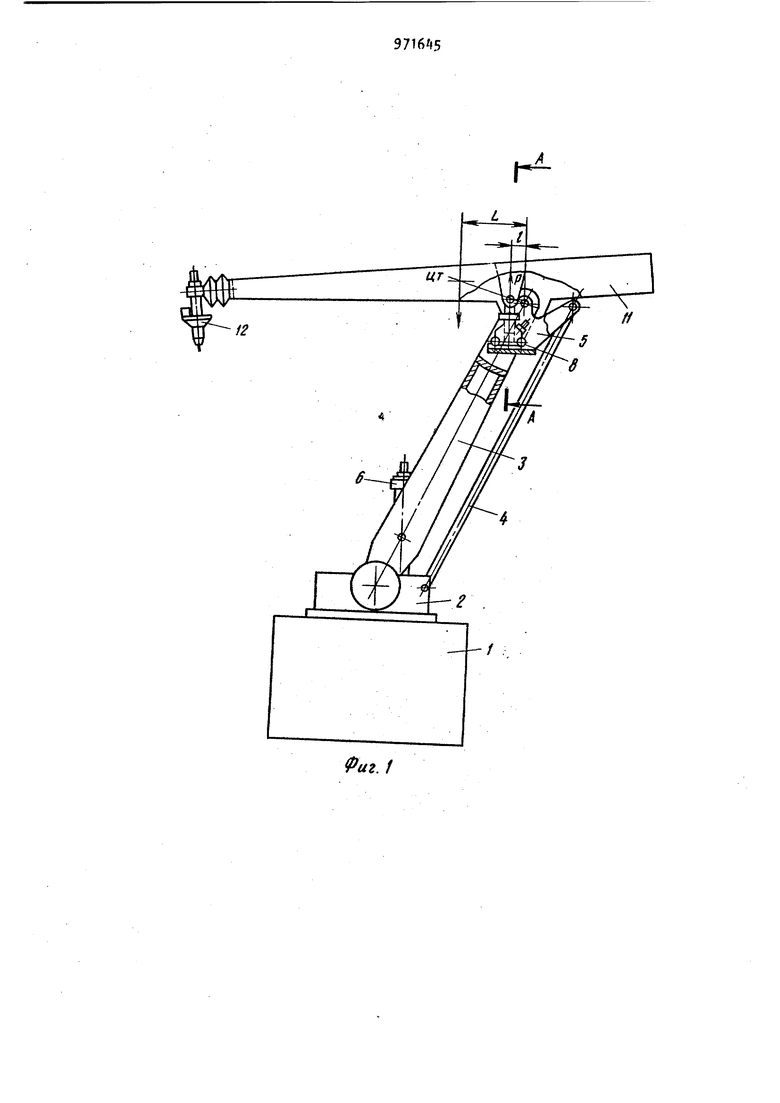
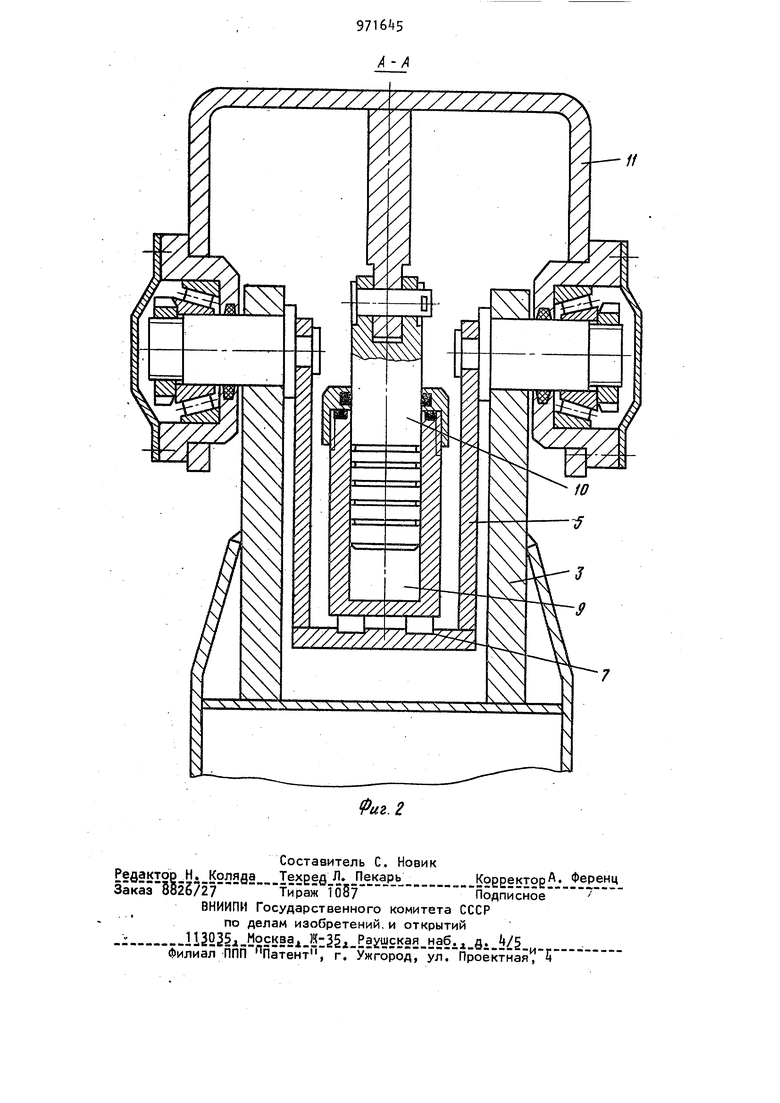
( S ) МАНИПУЛЯТОР руки С исполнительным органом на другое звено и, поскольку это изменение не компенсируется соответствующим изменением уравновешивающей силы, равновесие нарушается 1 . 1,йлью изобретения является повышение точности уравновешивания. Он снабжен дополнительным механизмом уровновешивания, а звено механической руки, соединенное с основным механизмом уравновешивания, выполнено в виде параллелограммного механизма, при этом дополнительный механизм уравновешивания установлен на звене этого параллелограммного механизма и соединен со вторым звеном механической руки. На фиг. 1 показан манипулятор, общий вид; на фиг. 2 - сечение А-А на фиг. 1. Манипулятор состоит из основания 1 с поворотным столом 2 на котором звено 3 образует с параллельной ему тягой k и люлькой 5 (верхнее звено) 397 шарнирный параллелограмм. Звено 3 соединено с механизмом 6 уравновешивания, На люльке 5 расположены горизонтальные направляющие 7 по которым перемещается каретка 8 с жестко закреплённым на ней в вертикальном положении силовым цилиндром 9 дополни.тельного механизма уравновешивания, шток 10 которого шарнирно соединен со звеном 11. Цилиндры двух механизмов уравновешивания подключены к системе постоянного давления (не показана). Точка соединения штока 10 со звеном 11, центр тяжести и ось вращения указанного звена расположены на Ьдной прямой. Работа манипулятора осуществляется следующим образом. С помощью установленных в сочленениях механической руки приводов (не показаны) , а в режиме обучения вручную за рабочий орган 1. перемещают этот рабочий орган (например, сварочную головку или крас кораспылитель) по требуемой траектории. Звенья 11 и 3 при этом изменяют свои угловые положения. Каретка 8 перемецается по направляющим 7 люльки 5 обеспечивая постоянное значение отношения размеров Lf у : const, где L - плечо действия силы веса зве на 1 1 ; - плечо действия уравновешиваю щей силы Р. i Этим обеспечивается точное уравновешивание звена 11 механической ру- . ки в любых ее угловых положениях постоянной по величине урввновешйваюи ей силой Р. Поскольку звено 1 Г уравновешено, смещение его центра тяжести не изменяет момента действия веса звена 11 на звено 3 и основной механизм 6 оказывается способным осуществлять точное уравновешивание. Точное уравновешивание обоихзвеньев руки существенно облегчает процесс обучения с перемещением рабочего органа вручную по требуемой траектории с необходимой точностью. Формула изобретения Манипулятор по авт.св. М . отличающийся тем, что, с целью повышения точности уравновешивания, он снабжен дополнительным механизмом уравновешивания, а звено механической руки, соединенное с основным механизмом уравновешивания, выполнено в виде параллелограммного механиз ма, при этом дополнительный механизм уравновешивания установлен на звене этого параллелограммного механизма и соединен с вторым звеном ме-ханической руки. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР N 76197Ь кл. В 25 J 11/00, 1978.
1fe. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1978 |
|
SU764974A1 |
| Манипулятор | 1988 |
|
SU1602728A2 |
| ДВУХКОМПОНЕНТНЫЙ ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 2005 |
|
RU2363570C2 |
| Исполнительный орган манипулятора | 1986 |
|
SU1421522A1 |
| Манипулятор | 1983 |
|
SU1183360A1 |
| Манипулятор | 1980 |
|
SU1050863A1 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| Манипулятор | 1983 |
|
SU1186464A1 |
| Манипулятор | 1984 |
|
SU1296400A1 |