Изобретение относится к машиностроению, в частности к робототехнике,, и предназначено для автоматизации текнологических процессов в- различных областях промышленности при холодной листовой штамповке.
Цель изобретения - повышение производительности за счет автоматизации смены рабочих органов.
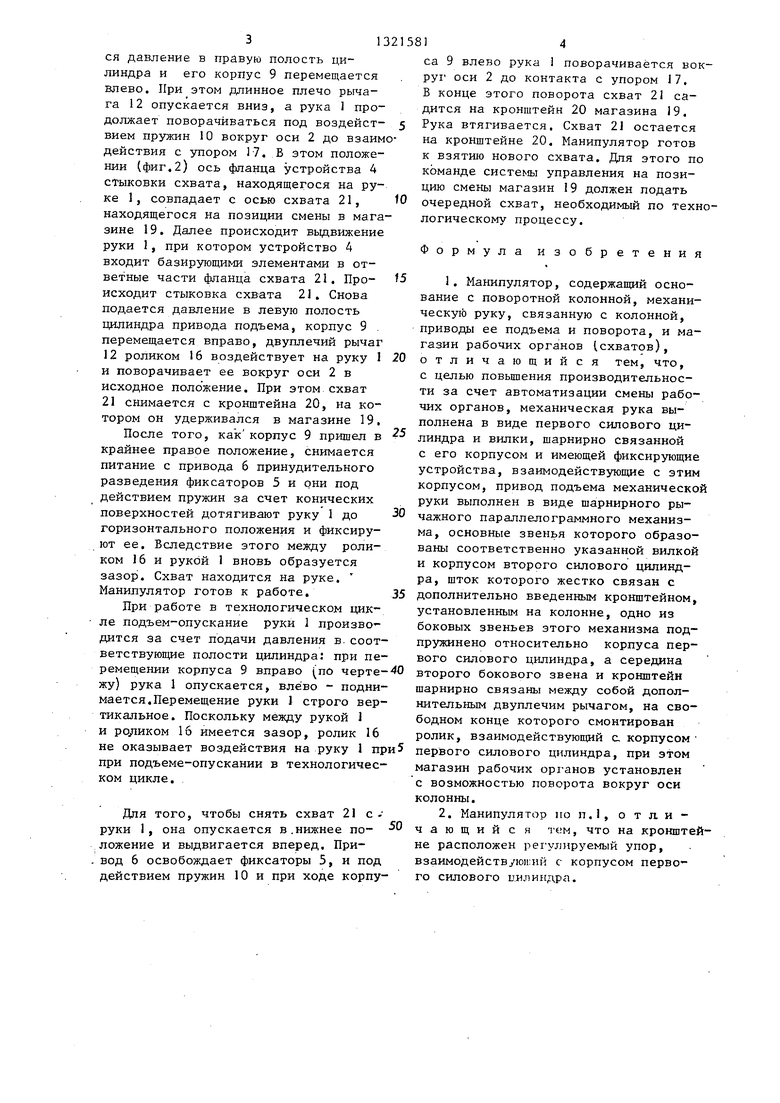
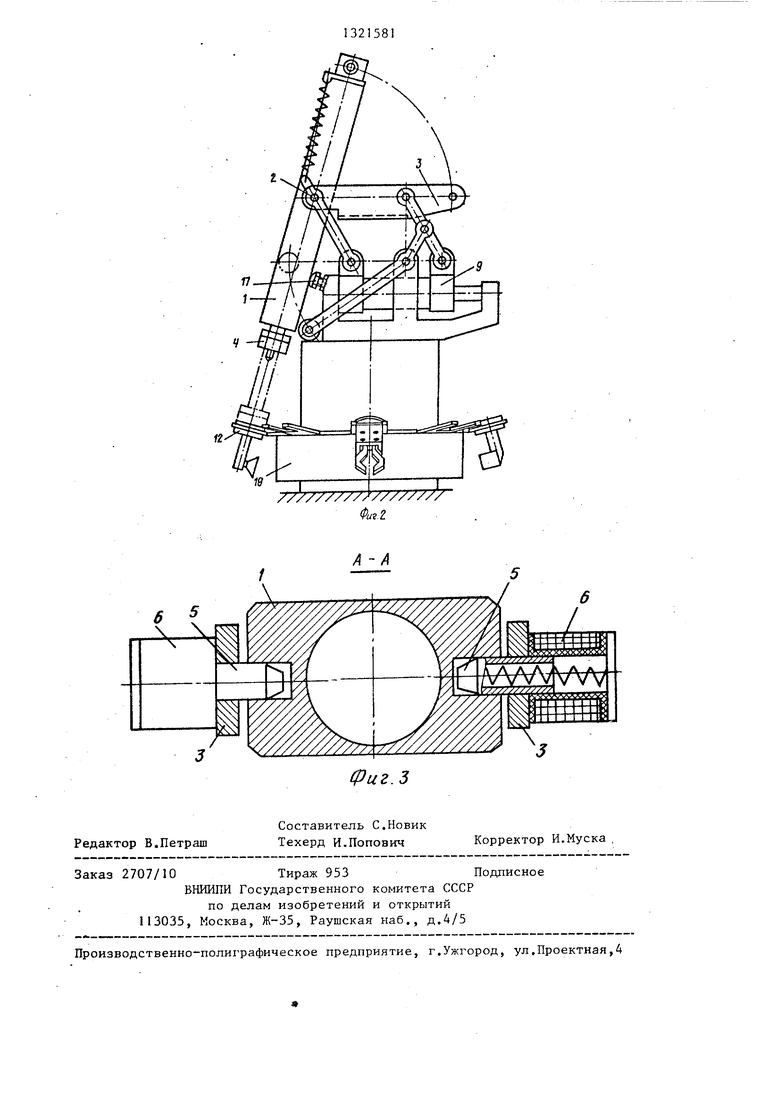
На фиг„ 1 изображен манипулятор, общий вид, в рабочем пололсении; на фиг,2 - то же, в положении смены схв та; на фиг.З - разрез А-Л на фиг.1.
Манипулятор содержит руку 1 в вид силового цилиндра возвратно-поступательного движения,,которая на оси 2 крепится с возможностью качания в вертикальной плоскости к вилке 3„ К - торцу подвижной части руки 1 прикреплено устройство 4 стыковки схвата В горизоита:-1ъном положении относительно вилки 3 рука 1 удерживается благодаря подпружиненнь1м фиксатором 5 5 имегопщм привод б принудительного их разведения (например, электромагнит или силовой цилиндр)« Вилка 3 вместе с передними рычагами 7, задними рычагами 8 и подвижным корпусом 9 горизонтально расположенного силового цилиндра образует шарнирный параллелограммный механизм. Причем ось 2 одновременно является осью крепления передних рычагов 7 к вилке 3„ Кроме того, передние рычаги 7 свя заны с рукой 1 пружинами 10 растяжения так, что последние стремятся повернуть руку 1 из ее горизонтального положения вокруг оси 2.
Задние рычаги 8 в средней части
имеют ось 115 на которой шарнирно закреплено короткое плечо двуплечего рычага 12. Ось 13 качания рычага 12 неподвижна и связана с кронштейном 14, она лежит в плоскости осей 15 крепления рычагов 7 и 8 к подвижному корпусу 9 силового цилиндра, который имеет возможность перемещения относительно кронштейна 14. Длина короткого плеча двуплечего рычага 12 равна половине длины рычагов 7 и 8 .. параллелограммного механизма. На длинном плече рычага 12 расположен ролик 16, который имеет возможность взаимодействовать с рукой 1 в случае ее поворота вокруг оси 2,
Дня ограничения угла поворота рукн 1 вокруг оси 2 служит регулируемый упор 17. Двуплечий рычаг 12 вы- ,
5
0
5
полней так, что при горизонтальном расположении руки 1, удерживаемой фикса-, торами 5 в вилке 3, между поверхностью руки 1 и роликом 16 имеется
зазор {фиг.1). Кронштейн 14 установлен на поворотной колонке 18. В нижней части манипулятора {засположен поворотный магазин 19 схватов, в котором находятся на кронштейнах 20
0 схваты 21, В позиции смены схвата 21 он занимает такое положение, что ось его фланца пересекает ось 2 качания руки 1 и совпадает с осью устройства 4 стыковки схватао
Манипулятор работает следуюшлм образом,
В исходном положении рука 1 удерживается в горизонтальном положении в вилке 3 с помощью подпружиненных фиксаторов 5, Подвижный корпус 9 силового цилиндра находится в крайнем левом (по чертежу) положении, рука втянута,
j Для того, чтобы взять схват 21 из заполненного механизма 19 схватов, от системы управления манипулятором поступает команда на взятие схвата. Для этого магазин 19, поворачиваясь вокруг вертикальной оси, предоставляет нужный для работы схват 21 в позицию смены. Затем подается давление в левую полость горизонтально расположенного силового цилиндра и его подвижный корпус 9 перемещает
5 ся вправо (по чертежу). При этом рука 1 вместе с вилкой 3 на рычагах 7 и 8 опускается в нижнее положение.
Геометричес| ие параметры параллелограммного механизма подобраны так, что горизонтальное перемещение осей крепления рычагов 7 и 8 (боковых звеньев) к вилке 3 (основному звену) при движении корпуса 9 (второго основного звена параллелограммного механизма) равно и противоположно направлено горизонтальному перемещению осей 15 крепления рычагов 7 и 8 к подвижному корпусу 9. Благодаря этому рука 1 вместе с вилкой 3 совершает строго вертикальное перемещение при горизонтальном перемещении корпуса 9,
После того, как рука 1 придет в низшее положение, с помощью привода
6 разводятся фиксаторы 5 и рука 1 под воздействием пружин 10 начинает поворачиваться вокруг оси 2 до упора в ролик 16 рычага 12. Затем подает0
0
5
0
ся давление в правую полость цилиндра и его корпус 9 перемещается влево. При этом длинное плечо рычага 12 опускается вниз, а рука продолжает поворачиваться под воздейст- вием пружин 10 вокруг оси 2 до взаимдействия с упором 17. В этом положении (фиг.2) ось фланца устройства 4 стыковки схвата, находящегося на руке 1, совпадает с осью схвата 21, находящегося на позиции смены в магазине 19. Далее происходит выдвижение руки 1, при котором устройство 4 входит базирующими элементами в ответные части фланца схвата 21. Про- исходит стыковка схвата 21. Снова подается давление в левую полость цилиндра привода подъема, корпус 9 . перемещается вправо, двуплечий рычаг 12 роликом 16 воздействует на руку 1 и поворачивает ее вокруг оси 2 в исходное положение. При этом схват 21 снимается с кронштейна 20, на котором он удерживался в магазине 19,
После того, как корпус 9 пришел в крайнее правое положение, снимается питание с привода 6 принудительного разведения фиксаторов 5 и они под действием пружин за счет конических поверхностей дотягивают руку 1 до горизонтального положения и фиксируют ее. Вследствие этого между роликом 16 и рукой 1 вновь образуется зазор. Схват находится на руке. Манипулятор готов к работе.
При работе в технологическом цик ле подъем-опускание руки 1 произво-- дится за счет подачи давления в. соответствующие полости цилиндра: при пе
ваны соответственно указанной вилкой и корпусом второго силового цилиндра, шток которого жестко связан с 35 дополнительно введенным кронштейном, установленным на колонне, одно из боковых звеньев зтого механизма подпружинено относительно корпуса первого силового цилиндра, а середина
ремещении корпуса 9 вправо пО черте-40 второго бокового звена и кронштейн жу) рука 1 опускается, влево - поднимается. Перемещение руки I строго вертикальное. Поскольку между рукой 1 и ро/1иком 16 имеется зазор, ролик 16
шарнирно связаны между собой дополнительным двуплечим рычагом, на свободном конце которого смонтирован ролик, взаимодействующий с корпусом
не оказывает воздействия на руку 1 при5 первого силового цилиндра, при этом
при подъеме-опускании в ком цикле.
технологичесДля того, чтобы снять схват 21 с - руки 1, она опускается в.нижнее по- ложение и выдвигается вперед. При- вод 6 освобождает фиксаторы 5, и под действием пружин 10 и при ходе корпуса 9 влево рука 1 поворачивается вокруг оси 2 до контакта с упором 17. В конце этого поворота схват 21 садится на кронштейн 20 магазина I9. Рука втягивается. Схват 21 остается на кронштейне 20. Манипулятор готов к взятию нового схвата. Для этого по команде системы управления на позицию смены магазин 19 должен подать очередной схват, необходимый по технлогическому процессу.
Формула изобретения
1. Манипулятор, содержащий основание с поворотной колонной, механи- ческу о руку, связанную с колонной, приводы ее подъема и поворота, и магазин рабочих органов (схватов), отличающийся тем, что, с целью повышения производительности за счет автоматизации смены рабочих органов, механическая рука выполнена в виде первого силового цилиндра и вилки, шарнирно связанной с его корпусом и имеющей фиксирующие устройства, взаимодействующие с этим корпусом, привод подъема механическо руки выполнен в виде шарнирного рычажного параллелограммного механизма, основные звенья которого образо
ваны соответственно указанной вилкой и корпусом второго силового цилиндра, шток которого жестко связан с дополнительно введенным кронштейном, установленным на колонне, одно из боковых звеньев зтого механизма подпружинено относительно корпуса первого силового цилиндра, а середина
второго бокового звена и кронштейн
шарнирно связаны между собой дополнительным двуплечим рычагом, на свободном конце которого смонтирован ролик, взаимодействующий с корпусом
первого силового цилиндра, при этом
магазин рабочих органов установлен с возможностью поворота вокруг оси колонны.
2. Манипулятор по п.1, о т л. и - чающийся тем, что на кронштейне расположен регулируемый упор, взаимодействую11:ий с корпусом первого силового цилиндра.
А А
Редактор В.Петраш
Составитель С.Новик Техерд И.Попович
Заказ 2707/10Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
- в-- --- --.--.- -.в™.™,,-Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Фиг.З
Корректор И.Муска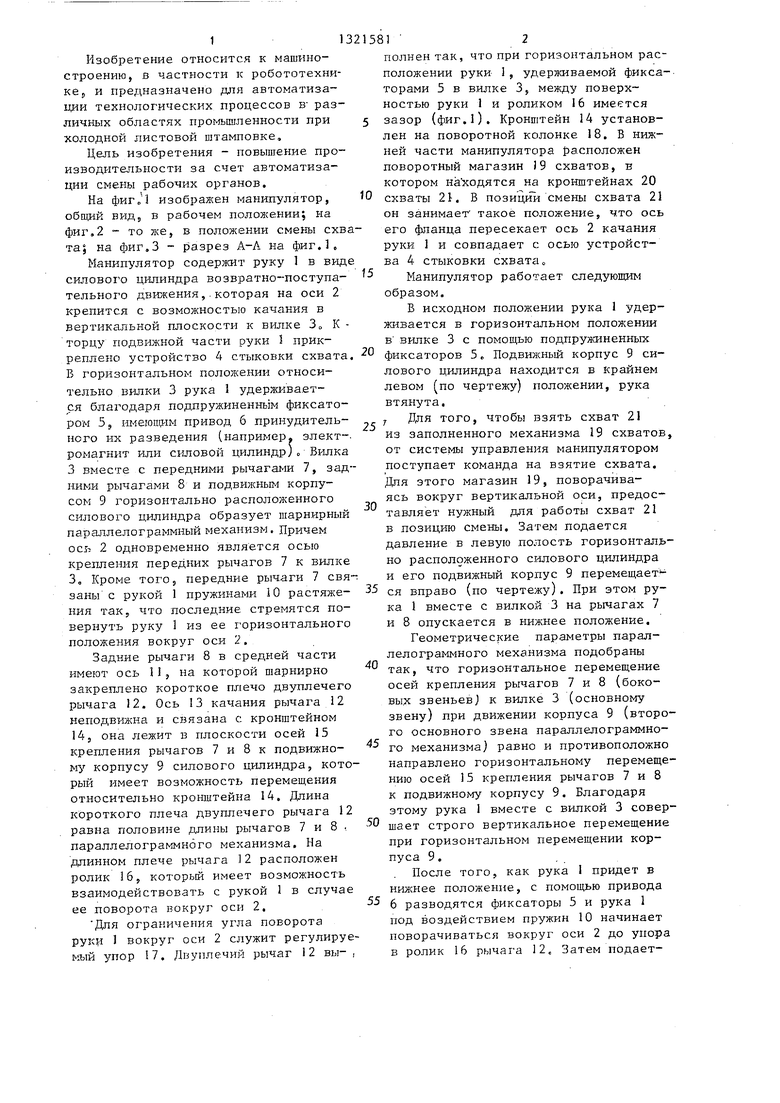
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической смены схватов | 1987 |
|
SU1530440A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Стыковочное устройство | 1984 |
|
SU1202877A1 |
| Манипулятор | 1987 |
|
SU1423368A1 |
| Схват | 1983 |
|
SU1117208A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
Изобретение относится к области машиностроения, в частности к робототехнике. Цель изобретения - расширение технологических возможностей за счет автоматической смены рабочих органов (схватов). Механическая рука 1 имеет устройство 4 стыковки со схватами 21, расположенными в магазине 19, который периодически поворачивается относительно колонны 18 и в зависимости от технологического процесса подает нужный схват под устройство 4 стыковки. Для того, чтобы взять.схват 21, подвижный корпус 9 перемещается вправо, боковые звенья параллелограммного механизма наклоняются и вилка 3, связанная с рукой 1, опускается. Затем фиксаторы, име- ющие привод 6, разъединяют руку 1 и вилку 3. Подпружиненная рука поворачивается вокруг оси 2 до упора в регулируемый упор 17, установленный на кронштейне 14 колонны 18. При этом оси руки 1 и сменного схвата 21 совпадают, рука подается к схвату и устройством 4 осуществляется их стыковка. Обратным движением руки схват 21 вынимается из магазина 19 и вместе с рукой перемещается в исходное положение. 1 ЗоП. ф-лы, 3 ил. А
