31550346
Изобретение относится к измериельной технике, предназначено для змерения величины неуравновешенности ее углового положения и может ис- с пользоваться в различных отраслях наодного хозяйства для балансировки ашин и узлов в сборе с собственным приводом, например, поршневых двигателей или карданных валов непосредст- JQ венно на автомобиле.
Цель изобретения - повышение точности за счет исключения влияния погешностей изготовления посадочных поверхностей, приводящего к появлению 15 ополнительных динамических погреш- но стей.
На чертеже представлена блок-схема стройства.
Устройство содержит последователь- 20 но соединенные преобразователь 1, первый перестраиваемый фильтр 2, первый коммутатор 3, второй вход которого соединен с выходом преобразовате- ля 1, второй перестраиваемый фильтр 4,25 фазовый детектор 5, второй вход которого соединен с выходом первого коммутатора 3,- второй коммутатор 6, первый блок 7 памяти, регулируемый резистор 8, переключатель 9 и синхронизатор Ю,зо первый и второй переменные резисторы 11 и 12, связанные соответственно с первым перестраиваемым фильтром 2 и переключателем 9, выход которого соединен с управляющим входом второго перестраиваемого фильтра 4, и после довательно соединенные датчик 13 начала отсчета, блок 14 обработки, второй вход которого соединен с выходом второго перестраиваемого фильтра 4, третий коммутатор 15, второй вход которого соединен с третьим входом первого коммутатора 3, вторым входом второго коммутатора 6 и выходом синхронизатора 10, второй блок 16 памя- ти и блок 17 индикации.
Устройство работает следующим образом.
Непостоянство частоты вращения не только в процессе измерения, но и от пуска к пуску для различных экземпля ров балансируемых изделий не позволяет использовать фильтры с фиксированной частотой настройки для обработки сигнала преобразователя 1 из-за наличия фазовых сдвигов, зависящих от частоты сигнала, Для исключения этого явления в предлагаемом устройстве предусмотрено два рода работы - 35
- 50
55
с JQ
15
20 25 зо
35
50
55
ной и автоматический. При автомати- . ческой работе вначале осуществляется измерение и устранение фазовых сдви- гов (режим Тарировка), а затем определение величины неуравновешенности и ее углового положения (режим Измерение). Данные режима автоматически чередуются с частотой, задаваемой синхронизатором 10. Во избежание появления фазовых сдвигов при переходе из режима Тарировка в режим Измерение частоты сигналов в этих режимах должны быть равными. Неравенство этих частот, даже небольшое, вызывает существенные ошибки в определении углового положения неуравновешенности, что обусловлено значительной крутизной фазочастотной характеристики перестраиваемого фильтра 4. Тари- ровочный сигнал должен быть синусоидальным, поскольку в этом случае можно точно измерить фазовый сдвиг. Требование точного равенства частоты тарировочного сигнала частоте вращения вала при балансировке гов.орит о том, что первый должен быть сформирован из полезного сигнала преобразователя 1, т.е. путем фильтрации из него выделяется первая гармоническая составляющая и по ней производится настройка всего измерительного устройства. В процессе обработки первым перестраиваемым фильтром 2 тарировоч- ный сигнал получает фазовый сдвиг -по отношению к первой гармонической составляющей сигнала датчика 1, обусловленный фазочастотной характеристикой этого фильтра. Однако это не имеет значения, поскольку полученный сигнал служит только для измерения и устранения фазовых сдвигов в цепях измерительного устройства.
После тарировки осуществляется измерение углового положения и определение величины неуравновешенности. Операции Тарировка и Измерение следуют одна за другой и занимают короткий промежуток времени, .в течение которого частота вращения остается неизменной. Последнее условие является решающим при выборе частоты сигнала синхронизатора 10. В разработанном устройстве при частотах вращения порядка 2000-4000 об/мин она равнялась 1 Гц.
Таким образом, в режиме Тарировка сигнал с выхода перестраиваемого фильтра 2 поступает через коммутатор
3 на вход второго перестраиваемого фильтра 4. Этот фильтр аналогичен первому. Входной и выходной сигналы фильтра 4 поступают на входы фазового детектора 5. Его выходное напряжение пропорционально фазовому сдвигу, вносимому фильтром 4. На резонансной частоте этот фазовый сдвиг равен 180°. Выходное напряжение фазового детектора через коммутатор б и блок 7 памяти воздействует на регулируемый резистор 8, в качестве которого может использоваться, например, полевой транзистор, Изменением напряжения на затворе производятся изменение его сопротивления и перестройка резонансной частоты перестраиваемого фильтра 4. Параметры схемы фазового детек1550346
ности и ее угловом положении, полученной в процессе измерения в течение последующего процесса тарировки. В качестве коммутаторов использовались отдельные группы контактов одного реле. Г-образные RC-фильтры использовались как блоки 7 и 16 памяти. Это стало возможным благодаря отключению
их входов коммутаторами 6 и 12 и связи выходов этих Фильтров с каскадами с большим входным сопротивлением, Синхронизатор 10 представляет собой, например, мультивибратор, генерирующий сигнал с частотой 1 Гц, и питающий обмотку реле. Последнее и обеспечивает смену режимов Измерение и Тарировка. Чередование режимов работы измерительного устройства позво
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057309C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057310C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2073835C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ РАДИОТЕЛЕМЕТРИЧЕСКИХ СИГНАЛОВ | 1994 |
|
RU2126139C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ЭЛЕМЕНТОВ ДЕТАЛЕЙ МАШИН | 1993 |
|
RU2039957C1 |
Изобретение относится к балансировочной технике. Цель изобретения - повышение точности за счет исключения влияния погрешностей изготовления посадочных поверхностей. Сигналы с преобразователя 1 и датчика 13 начала отсчета поступают на входы блока 14 обработки, а оттуда в блок 17 индикации. Измерения проводятся в ручном и автоматическомрежимах в положениях "тарировка" и "измерение". Переходы режимов осуществляются с помощью переменных резисторов 11 и 12, переходы положений - с помощью коммутаторов 3,6 и 15, управляемых синхронизатором 10. Информация при переходе из положения "измерение" в положение "тарировка" хранится в блоках 7 и 16 памяти. 1 ил.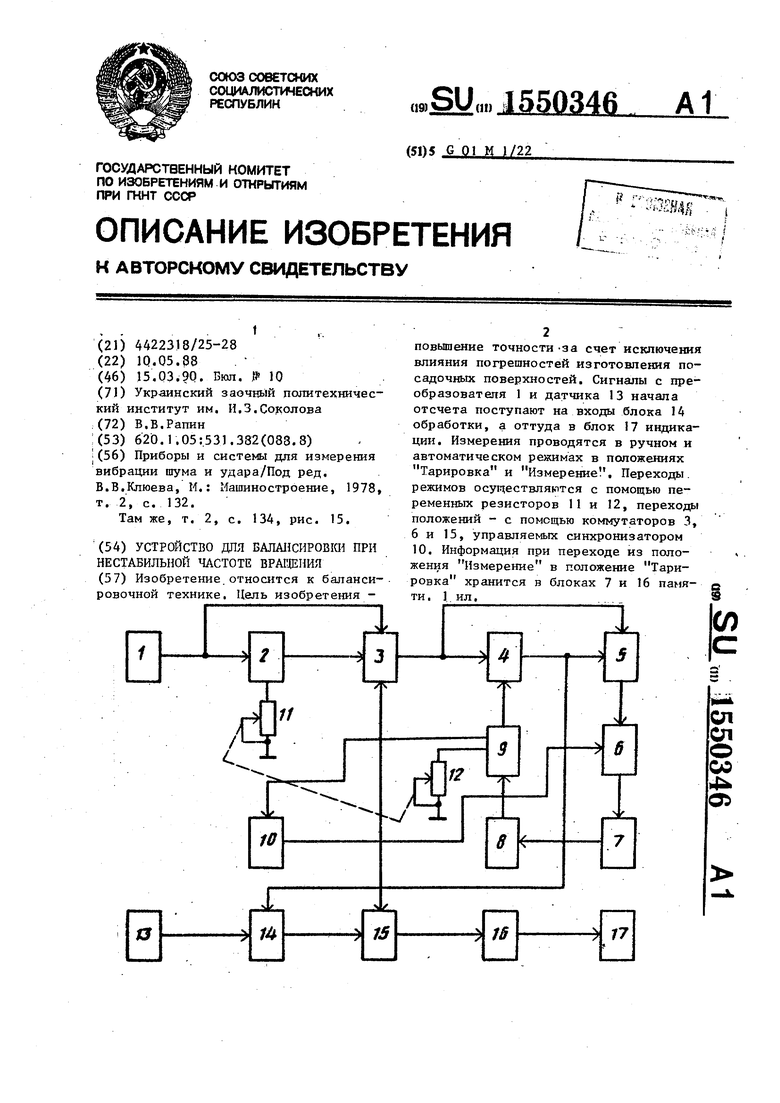
тора 5 и блока 7 памяти выбраны таким 20 ляет осуществить слежение за изменяюобразом, что происходит подстройка резонансной частоты перестраиваемого фильтра 4 до совпадения с частотой сигнала тарировки, После этого проис т
щеися частотой вращения и произвест измерение углового положения неурав новешенности и ее величины. Для обе печения работы устройства в автомат ческом режиме необходимо обеспечить
ходит переключение в режим Измере- 25
ние. Выходной сигнал преобразователя попадание сигнала преобразователя в
1 поступает через коммутатор 3 непосредственно на вход перестраиваемого фильтра 4. Теперь случайные сдвиги фазы первой гармоники сигнала этого фильтра отсутствуют, и она проходит на вход блока 14 обработки. Туда же поступает импульс начала отсчета угла поворота вала с выхода датчика 13 начала отсчета. После совместной обработки этих сигналов по известным алгоритмам информация о величине неуравновешенности и ее угловом положении поступает через коммутатор 15 и блок 16 памяти в блок 17 индикации. Коммутатор 3 обеспечивает поступление на вход перестраиваемого фильтра 4 по очередно сигнала тарировки с выхода перестраиваемого фильтра 2 или информационного сигнала непосредственно с выхода преобразователя 1 в зависимо-„ сти от режима работы устройства для I балансировки. Коммутатор 6 необходим для исключения регулировки фильтра 4 в режиме измерения. Блок 7 памяти служит для запоминания величины выходного напряжения фазового детектора 5 и поддерживает его неизменным в течение интервала времени, соответствующего процессу измерения. Коммутатор 15 отключает выход блока 14 обработки от входа блока 16 памяти, который обеспечивает хранение информации о величине неуравновешенщеися частотой вращения и произвести измерение углового положения неуравновешенности и ее величины. Для обеспечения работы устройства в автоматическом режиме необходимо обеспечить
0
5
0
5
0
5
полосу пропускания перестраиваемых фильтров 2 и 4. Для этого и существует ручной режим работы. Б этом случае с помощью переключателя 9 к входу управления перестраиваемого фильтра 4 подключается второй переменный резистор 12, спаренный с первым переменным резистором 11. Этими резисторами осуществляется изменение резонансных частот перестраиваемых фильтров 2 и 4, которые остаются приблизительно равными во всем диапазоне перестройки, и настройка на частоту сигнала преобразователя 1. Этот момент контролируется по показаниям блока 17 индикации. В ручном режимз коммутаторы 6 и 15 включены и обеспечивают прохождение сигнала. Коммутатор 3 обеспечивает прохождение сигнала с выхода фильтра 2 на вход фичьт- ра 4. Это обеспечивается за счет соединения второго выхода переключателя 9 с входом синхронизатора 10.
После настройки с помощью переключателя 9 происходит переход в автоматический режим работы. При этом вместо второго переменного резистора R2 к управляющему входу фильтра 4 подключается регулируемый резистор 8 и цепь автоподстройки замыкается. Синхронизатор 10 начинает работать, и с помощью коммутаторов 3, 6, 15 произ- юдится чередование режимов Тарировка и Измерение, Это обеспечивает отслеживание изменяющейся частоты вращения, что приводит к увеличению точности измерения углового положения и величины неуравновешенности.
По сравнению с прототипом, предлагаемое устройство позволит осуществлять балансировку узлов и изделий в сборе с собственным приводом. Это исключает влияние погрешностей изготовления посадочных поверхностей на состояние уравновешенности движущихся деталей, которое проявляется в виде дополнительных динамических нагру- jc первым блоком памяти, регулируемым
зок, пропорциональных квадрату скоростей вращения. Это особенно важно в связи с непрерывным ростом частот вращения, что является одной из особенностей технического прогресса.
Формула изобретения
Устройство для балансировки при нестабильной частоте вращения, содер- 25 жащее преобразователь, блок индикации и соединенные датчик начала отсчета и блок обработки, отличающе0346
10
8
е с я тем, что, с целью повышения точности, оно снабжено последовательно соединенными первым перестраиваемым фильтром с первым переменным резистором, первым коммутатором, второй вход которого соединен с выходом преобразователя и входом первого перестраиваемого фильтра, вторым перестраиваемым фильтром, выход которого соединен с вторым входом блока обработки, фазовым детектором, второй вход которого.соединен с выходом первого коммутатора, вторым коммутатором,
0
5
резистором и переключателем с вторым переменным резистором, выход переключателя соединен с управляющим входом второго перестраиваемого фильтра, соединенным третьим коммутатором, вход которого соединен блоком обработки, и вторым блоком памяти, выход которого соединен с блоком индикации, и синхронизатором, вход которого соединен с выходом переключателя, а выход - с третьим входом первого коммутатора и вторыми входами второго и
третьего коммутаторов.
i
| Приборы и системы для измерения вибрации шума и удара/Под ред | |||
| В.В.Клюева, М.: Машиностроение, 1978, т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получения нерастворимых лаков основных красителей в субстанции и на волокнах | 1923 |
|
SU132A1 |
| Там же, т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Халат для профессиональных целей | 1918 |
|
SU134A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
