Изобретение относится к атомному машиностроению и может быть использовано в конструкциях координатных мостов пере- грузочыых машин атомных реакторов, когда требуется точный выход рабочего органа перегрузочной машины на заданную координату перегружаемого элемента или его посадочного гнезда, находящегося на большой глубине под слоем теплоносителя.
Целью изобретения является улучшение эксплуатационных качеств путем повышения точности выхода моста на заданную координату.
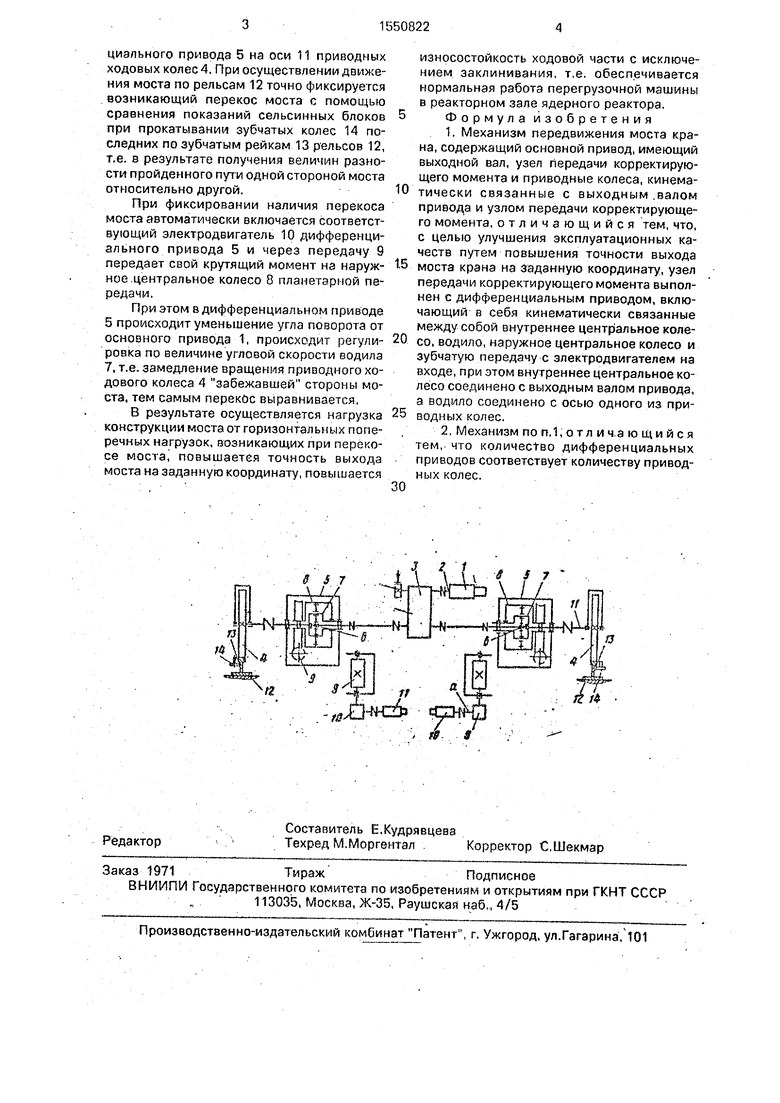
На чертеже изображена кинематическая схема механизма передвижения моста крана.
Механизм передвижения моста крана содержит основной привод 1, имеющий выходной вал 2, узел 3 передачи корректирующего момента, и приводные колеса 4,
кинематически связанные с выходным валом 2 привода 1 и узлом 3 передачи корректирующего момента.
Узел 2 передачи корректирующего момента выполнен с дифференциальным приводом 5, включающим в себя кинематически связанные между собой внутреннье центральное колесо 6, водило 7, наружное центральное колесо 8 и зубчатую передачу 9 с электродвигателем 10 на входе а.
Количество дифференциальных приводов 5 соответствует количеству приводных колес 4, имеющих оси 11 и устанавливаемых на рельсы 12, имеющие зубчатые рейки 13.
Механизм передвижения моста работает следующим образом,
При включении основного привода 11 крутящий момент с узла 3 передается через внутреннее центральное колесо 6 планетарной передачи и водила 7 каждого дифференсл
с
сл сл о
00
го ю
циэльного привода 5 на оси 11 приводных ходовых колес 4. При осуществлении движения моста по рельсам 12 точно фиксируется возникающий перекос моста с помощью сравнения показаний сельсинных блоков при прокатывании зубчатых колес 14 последних по зубчатым рейкам 13 рельсов 12, т.е. в результате получения величин разности пройденного пути одной стороной моста относительно другой.
При фиксировании наличия перекоса моста автоматически включается соответствующий электродвигатель 10 дифференциального привода 5 и через передачу 9 передает свой крутящий момент на наружное центральное колесо 8 планетарной передачи.
При этом в дифференциальном приводе 5 происходит уменьшение угла поворота от основною привода 1. происходит регулировка по величине угловой скорости водила 7, т.е. замедление вращения приводного ходового колеса 4 забежавшей стороны моста, тем самым перекос выравнивается,
В результате осуществляется нагрузка конструкции моста от горизонтальных поперечных нагрузок, возникающих при перекосе моста, повышается точность выхода моста на заданную координату, повышается
0
5
0
5
0
износостойкость ходовой части с исключением заклинивания, т е. обеспечивается нормальная работа перегрузочной машины в реакторном зале ядерного реактора. Формула изобретения 1. Механизм передвижения моста крана, содержащий основной привод, имеющий выходной вал, узел передачи корректирующего момента и приводные колеса, кинематически связанные с выходным валом привода и узлом передачи корректирующего момента, отличающийся тем, что, с целью улучшения эксплуатационных качеств путем повышения точности выхода моста крана на Заданную координату, узел передачи корректирующего момента выполнен с дифференциальным приводом, включающий в себя кинематически связанные между собой внутреннее центральное колесо, водило, наружное центральное колесо и зубчатую передачу с электродвигателем на входе, при этом внутреннее центральное колесо соединено с выходным валом привода, а водило соединено с осью одного из приводных колес.
2 Механизм по п.1, отл ича ю щи йся гем, что количество дифференциальных приводов соответствует количеству приводных колес.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| Судовой мостовой кран | 1976 |
|
SU611803A1 |
| МЕХАНИЧЕСКАЯ АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1993 |
|
RU2083385C1 |
| ЭЛЕКТРОПРИВОД | 2000 |
|
RU2173420C1 |
| УНИВЕРСАЛЬНАЯ ГОЛОНОМНАЯ ПЕРЕДАЧА С БЕССТУПЕНЧАТЫМ ИЗМЕНЕНИЕМ КРУТЯЩЕГО МОМЕНТА (ВАРИАНТЫ) | 2001 |
|
RU2192572C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВСТРАИВАЕМЫЙ ЗУБЧАТЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ КРУТЯЩЕГО МОМЕНТА, ПРЕОБРАЗОВАТЕЛЬ КРУТЯЩЕГО МОМЕНТА И ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ | 2012 |
|
RU2510696C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ПРИВОД | 2014 |
|
RU2561875C1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА АВТОМОБИЛЯ | 1991 |
|
RU2006383C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2134003C1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
Изобретение относится к атомному машиностроению и может быть использовано в конструкциях координатных мостов перегрузочных машин реакторов. Цель изобретения - улучшение эксплуатационных качеств путем повышения точности выхода моста на заданную координату. Крутящий момент с узла 3 передачи передается через внутреннее центральное колесо 6 планетарной передачи и водила каждого дифференциального привода 5 на оси 11 приводных ходовых колес 4. При фиксации наличия перекоса моста автоматически включается соответствующий электродвигатель 10 привода 5 и через передачу 9 передает свой крутящий момент на наружное центральное колесо 8 планетарной передачи. При этом в дифференциальном приводе 5 происходит уменьшение угла поворота от основного привода 1, происходит регулировка по величине угловой скорости водила 7, т.е замедление вращения приводного ходового колеса 4 забежавшей стороны моста, что обеспечивает выравнивание перекоса. 1 ил
7
jrrQj4Ujr ЖКОЯ8Ј
/г
4АтУь1Я
| Судовой мостовой кран | 1979 |
|
SU800024A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
