Изобретение относится к электротехнике, а именно к асинхронному электроприводу, и может быть использовано для регулирования частоты вращения асинхронных двигателей.
Известно устройство для управления асинхронным электродвигателем, включающее в себя подключенные между питающей трехфазной сетью переменного тока и статором электродвигателя три пары встречно- параллельно соединенных тиристоров, а также систему управления ими, обеспечивающую путем периодического чередования включенного и отключенного состояний тиристоров подведение к статору асинхронного двигателя составляющей напряжения пониженной частоты. В таком устройстве за счет постепенной отработки сигнала задания частоты обеспечивается формирование переходных процессов асинхронного двигателя.
Недостатком данного устройства является ограниченные возможности формирования переходных процессов,поскольку как увеличение, так и уменьшение скорости электродвигателя осуществляется при его работе на одних и тех же механических характеристиках, которые обеспечивают необходимое формирование только процесса торможения, а формирование процесса пуска двигателя до номинальной скорости в данном устройстве отсутствует.
Цель изобретения - расширение функциональных возможностей.
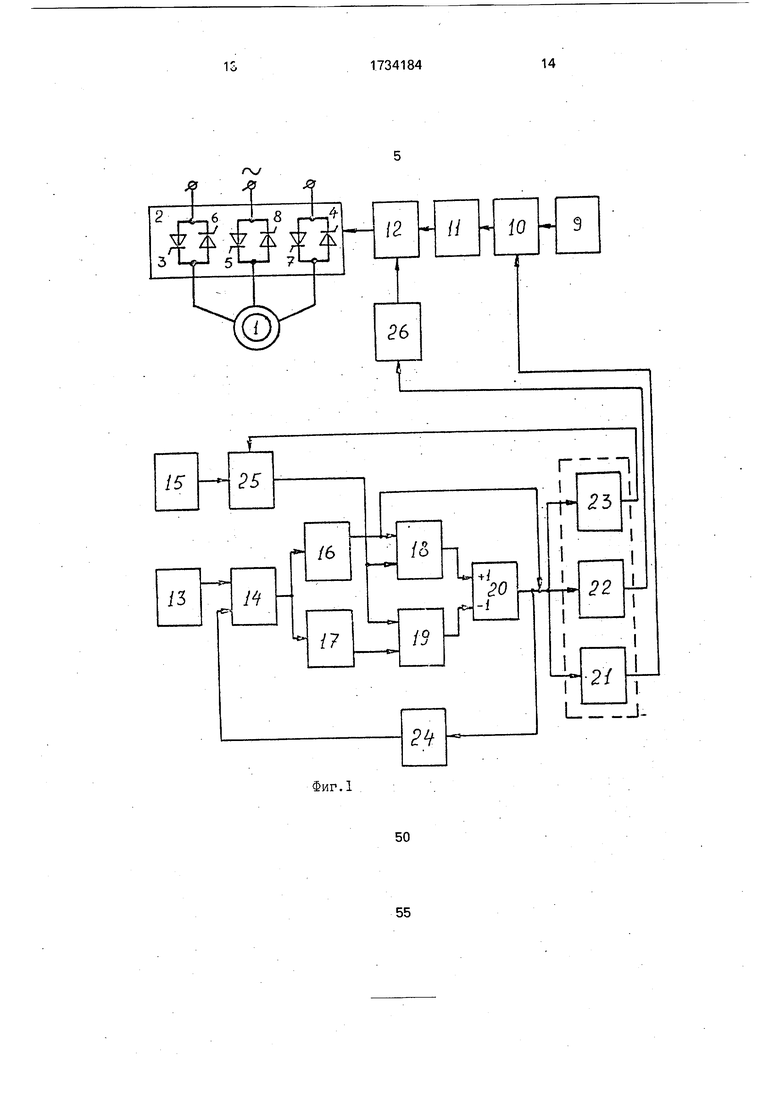
На фиг.1 показана блок-схема устройства для управления асинхронным электроЧ
CJ
00 4.
Ю
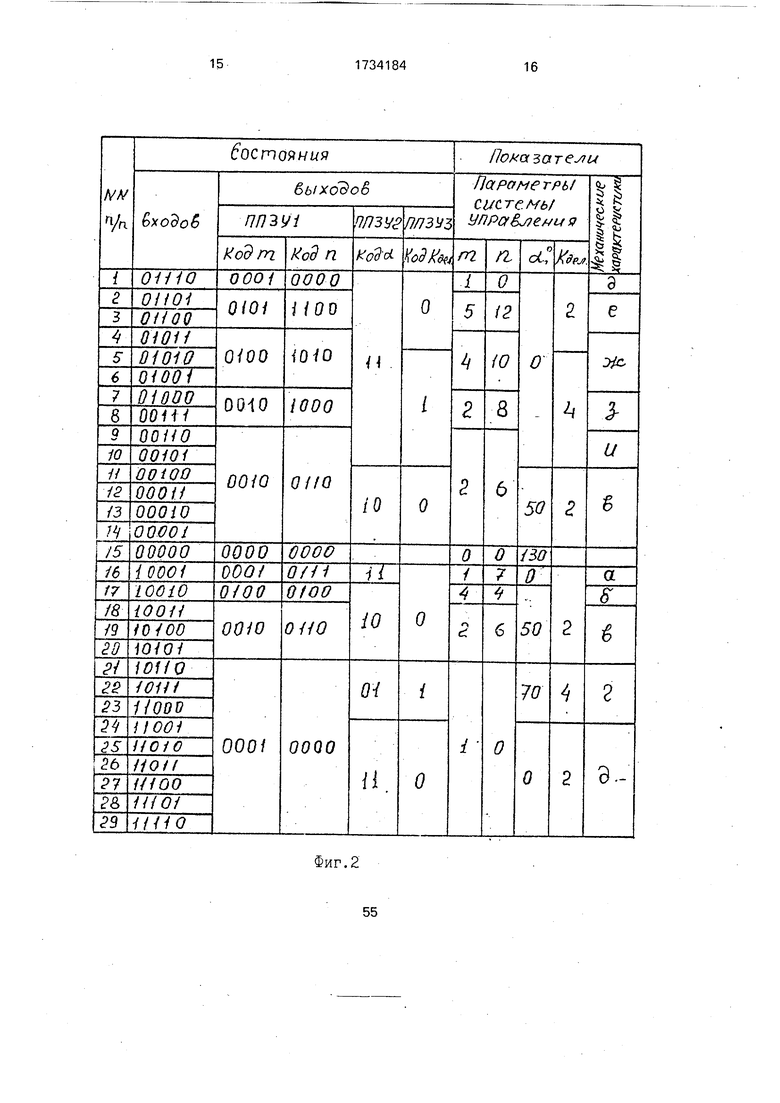
двигателем; на фиг.2 - таблица соответствия состояний постоянных программируемых запоминающих устройств ППЗУ1, ППЗУ2, ППЗУЗ и показателей работы электропривода; на фиг.З - экспериментальные механические характеристики асинхронного двигателя типа МТГ011-6 мощностью 1,4 кВт; на фиг.4-7 - временные диаграммы работы устройства при пуске асинхронного двигателя на высокую скорость, пуске на малую скорость, при переходе с малой скорости на большую и при торможении с высокой скорости на малую.
Устройство содержит асинхронный электродвигатель 1, преобразователь 2 переменного напряжения, выполненный в виде встречно-параллельно соединенных тиристоров 3-8, включенных между зажимами статорных обмоток электродвигателя 1 и зажимами для подключения к питающей сети, последовательно соединенные задающий генератор 9 импульсов, синхронизированный с напряжением питающей сети, блок 10 формирования временных интервалов с информационными входами, узел 11 блокировки и блок 12 фазосмещения и распределения управляющих импульсов, выходы которого подключены к управляющим электродам тиристоров 3-8 преобразователя 2 переменного напряжения, а также за- датчик 13 частоты, блок 14 сравнения, генератор 15 тактовых импульсов, два компаратора 16 и 17, две схемы 18 и 19 совпадения, реверсивный счетчик 20 с прямым и обратным счетными входами, программируемые постоянные запоминающие блоки 21- 23, цифроаналоговый преобразователь 24, программируемый счетчик 25 и узел 26 задания управляющего сигнала. Первый вход блока 14 сравнения подключен к выходу за- датчика 13 частоты (скорости), а второй вход соединен с выходом цифроаналогового преобразователя 24. Выход блока 14 сравнения соединен с объединенными входами обоих компараторов 16 и 17, выход первого компаратора 16 соединен с первым входом первой схемы 18 совпадения, а выход второго компаратора 17 - с первым входом второй схемы 19 совпадения. Вторые входы обеих схем 18 и 19 совпадения объединены и соединены с выходом программируемого счетчика 25, счетный вход которого подключен к генератору 15 тактовых импульсов, а вход переключения коэффициента деления к выходу программируемого постоянного запоминающего блока 23. Выход первой схемы 18 совпадения подключен к прямому счетному входу реверсивного счетчика 20, а выход второй схемы 19 совпадения к обратному счетному входу реверсивного
счетчика 20, выходы которого связаны с адресными входами программируемых постоянных запоминающих блоков 21-23 и входами цифроаналогового преобразовате- ля 24. Выход программируемого постоянного запоминающего блока 21 связан с информационными входами блока 10 формирования временных интервалов, а выход программируемого постоянного запомина- 0 ющего блока 22 подключен ко входу узла 26 задания управляющего сигнала , выход которого соединен с управляющим входом блока 12 фазосмещения и распределения управляющих импульсов. Выход компарато- 5 ра 16 (или компаратора 17) подключен к адресным входам программируемых постоянных запоминающих блоков 21-23.
На фиг.2 в качестве примера приведена таблица соответствия состояний постоян- 0 ных программируемых запоминающих устройств 21-23, а также показателей работы электропривода (обозначение механических характеристик и параметры системы управления т, п, Кдел, где тип- целые 5 числа, определяющие длительность последовательно повторяющихся временных интервалов, соответственно включенного и отключенного состояний преобразователя 2 переменного напряжения; а- угол управ- 0 ления тиристоров преобразователя 2; Кдел - коэффициент деления программируемого счетчика 22.
На фиг.З также в качестве примера представлены экспериментальные механи- 5 ческие характеристики асинхронного двигателя мощностью 1,4 кВт при задании на информационные входы блока 10 формирования временных интервалов кодов целых чисел тип при различных углах а. управ- 0 ления тиристорами 3-8 для следующих случаев:
a-m 1,n 7,
б-т 4, п 4,
в- т 2, п 6, 5г-т 1, п 0,
д- т 1, п 0, а 0°
е- т 5, п 12,
ж- т 4, п 10,
з- т 2, п 8, 0 и-т 2, п 6,
При этом длительность временных интервалов включенного состояния преобразователя 2 равна m интервалам, а его отключенного состояния - п интервалам, между соседними управляющими импульсами, подаваемыми на управляющие электроды тиристоров 3-8.
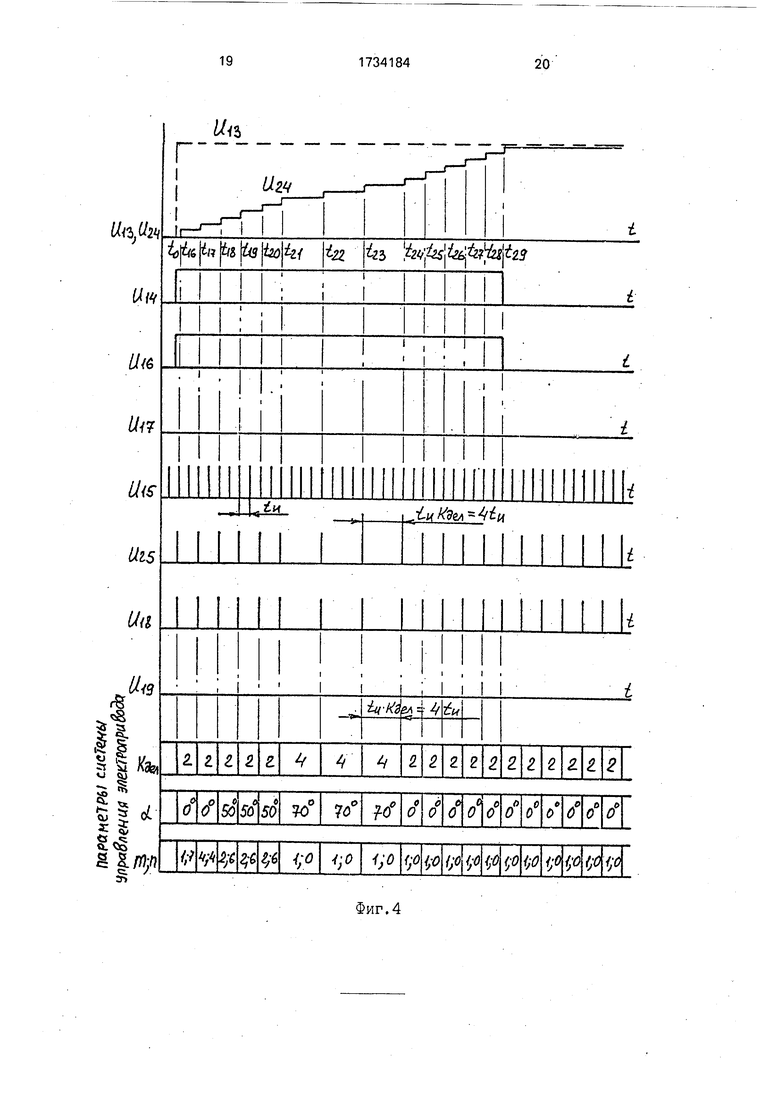
На фиг.4 приведены временные диаграммы устройства при формировании про5
цесса пуска асинхронного двигателя 1 на высокую скорость (на характеристику д, в случае изменения скачком сигнала скорости.
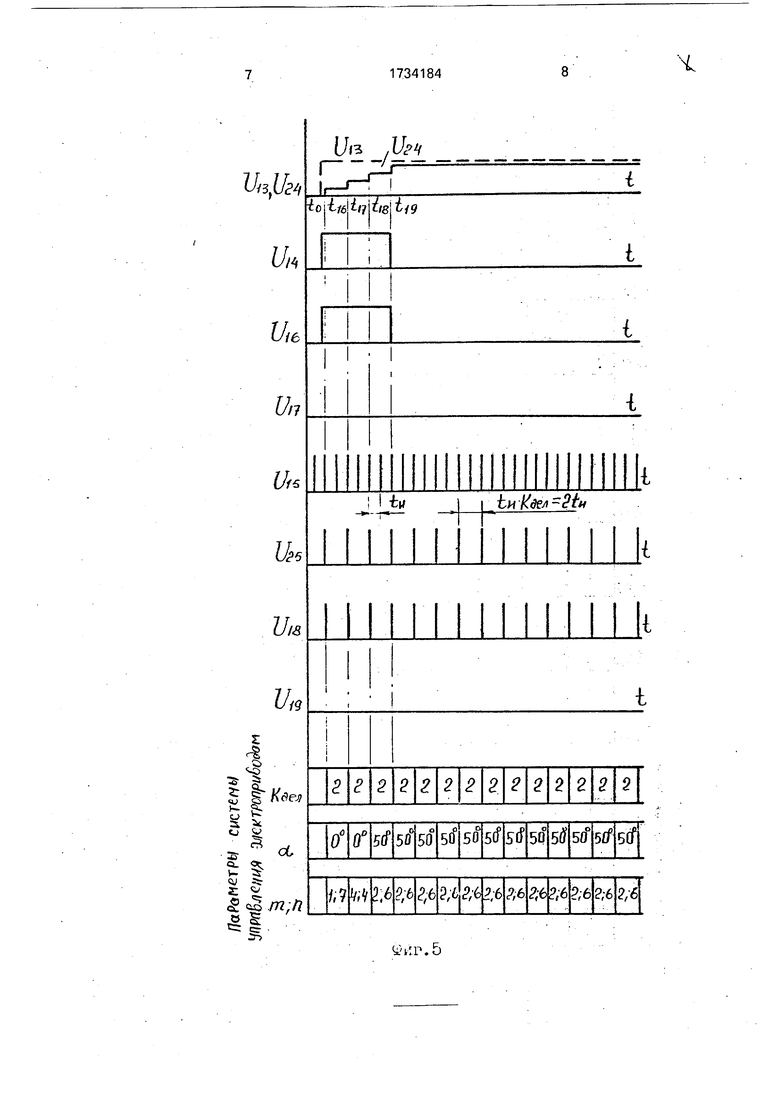
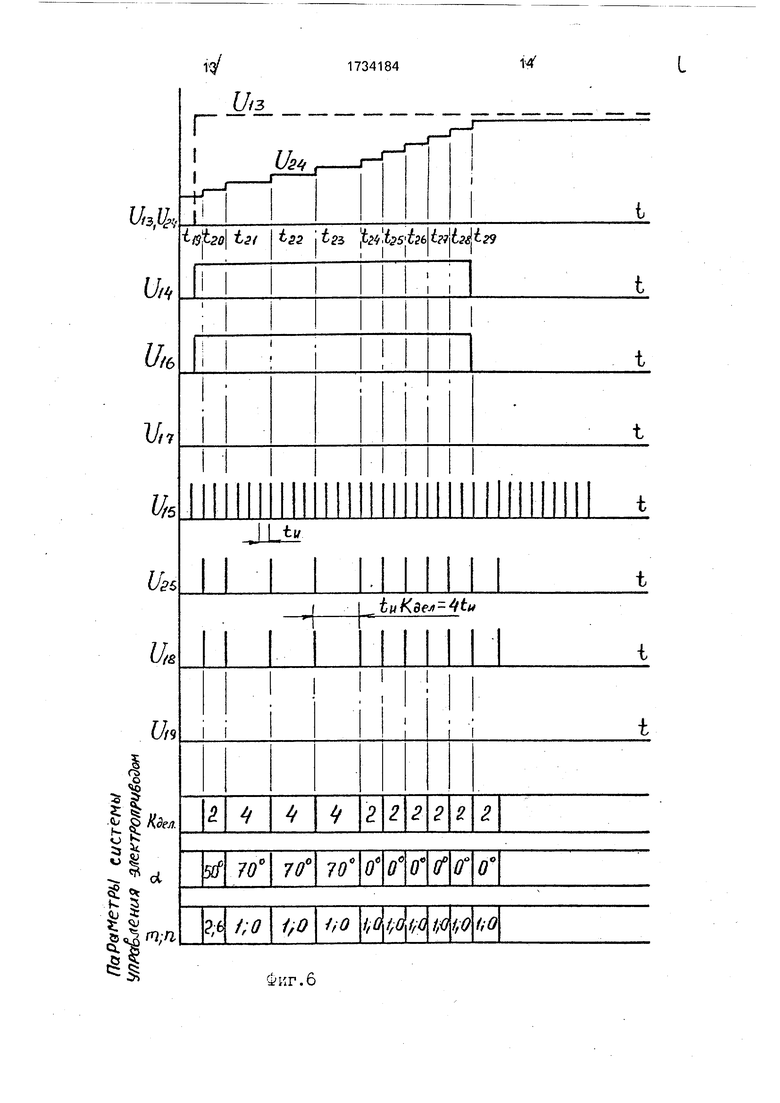
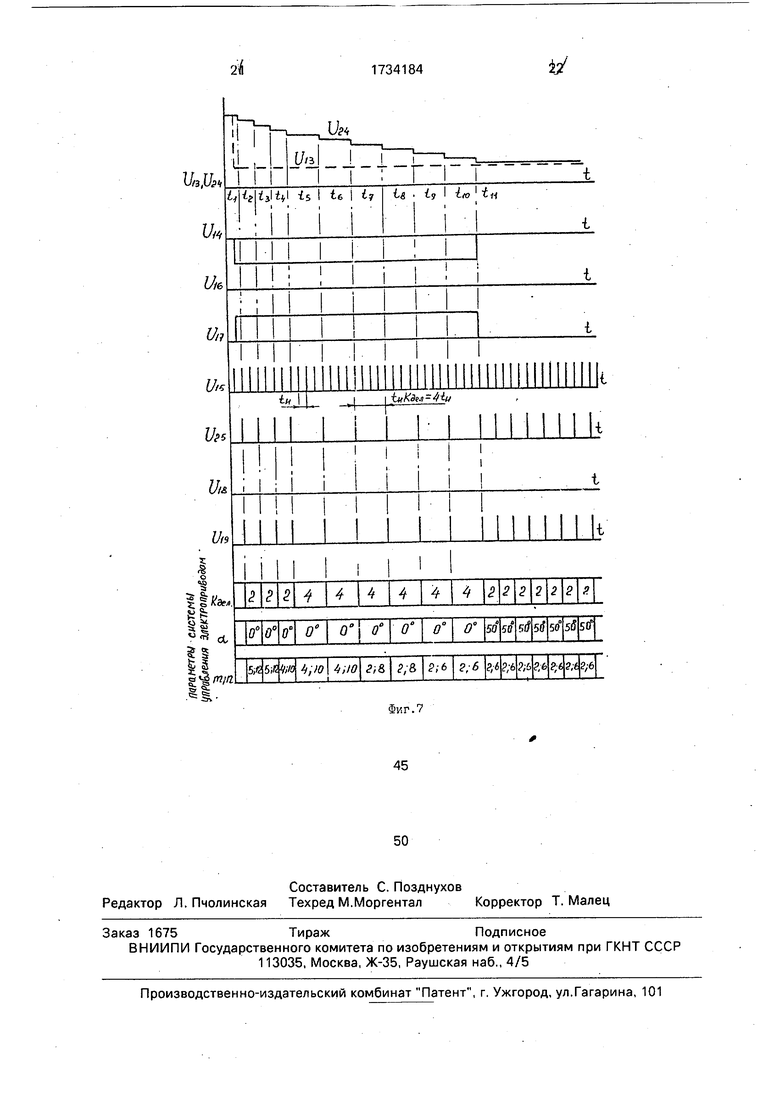
На фиг.5-7 приведены временные диаграммы для случаев пуска на малую скорость (на характеристику в), перехода с малой скорости на высокую (с характеристики в на характеристику д) и торможение с высокой скорости на малую (с характеристики е на характеристику в).
На фиг.4-7 показаны DIG - сигнал на выходе задатчика 13 частоты; U24 - сигнал на выходе цифроаналогового преобразователя 24; Ui4 - сигнал на выходе улока 14 сравнения; Uie, Ui - сигналы на выходах компараторов 16 и 17; Ui5 сигнал на выходе генератора 15; U25 - сигнал на выходе программируемого счетчика 25; Uie, Dig - сигналы на выходах схем 18 и 19 совпадения, а также значения параметров системы управления электропривода, соответствующие кодам на выходах программируемых постоянных запоминающих блоков 21-23 в функции времени.
Устройство позволяет реализовать следующие режимы программного пуска на малую скорость (на характеристику в); программного пуска на большую скорость (на характеристику д) программного торможения с большой скорости на малую.
Работа устройства для управления асинхронным электродвигателем основана на том, что за счет постепенной ступенчатой отработки сигнала задания скорости обеспечивается последовательный перевод электропривода по выбранным механическим характеристикам на требуемую характеристику, например на в или д.
Каждая из механических характеристик определяется тремя группами параметров системы управления:
1)коэффициентом деления Кдел, который задает время работы электропривода на данной механической характеристике;
2)углом а управления тиристоров, задаваемым с помощью узла 26 и определяющим уровень напряжения на статоре двигателя 1;
3)параметрами тип, задающими скорость двигателя и формируемыми с помощью блока 10.
Значения параметров Кдел, m, n формируются выходными сигналами, поступающими с выходов запоминающих блоков 23, 22 и 21 на входы счетчика 25, узла 26 и блока 10 соответственно.
При этом угол а управления тиристорами однозначно определяется напряжением, поступающим на вход блока 12с выхода узла 26 задания управляющего сигнала.
Узел 26 может быть выполнен, например, в виде резисторного делителя напряжения, в котором изменение выходного напряжения осуществляется при включении или отключении транзисторных ключей в цепях отдельных резисторов, входящих в схему этого делителя, при этом управление ключами производится выходными сигналами, программируемого постоянного запоминающего блока 22. Управляет состояниями постоянныхпрограммируемых
запоминающих блоков 23, 22 и 21 счетчик 20, состояние которого в процессе работы устройства может оставаться неизменным либо последовательно изменяться. В первом случае сигнал с задатчика 13 частоты равен выходном сигналу цифроаналогового преобразователя 24, что соответствует установившемуся режиму работы электропривода. Во втором случае эти сигналы не
равны между собой. При этом, если сигнал задатчика 13 частоты больше выходного сигнала цифроаналогового преобразователя 24, то на выходе блока 14 сравнения имеется положительный сигнал рассогласования,
под действием которого срабатывает компаратор 16 и его выходной сигнал разрешает прохождение импульсов с выхода программируемого счетчика 25 через схему 18 совпадения на прямой счетный вход реверсивного счетчика 20. Счетчик 20 изменяет свое состояние на единицу в сторону увеличения с частотой следования импульсов с выхода программируемого счетчика 25 до тех пор, пока сигнал с выхода цифроаналогового преобразователя 24 не станет равным сигналу с задатчика 13 частоты. В результате последовательного изменения состояний счетчика 20 из определенной области памяти постоянного запоминающего
блока 21 последовательно выбираются коды чисел тип, которые обеспечивают частоты пониженной составляющей напряжения на статорных обмотках асинхронного двигателя 1 и его последовательную работу на различных характеристиках. Одновременно с запоминающим блоком 21 работают запоминающие блоки 22 и 23, которые задают (в виде кодов) соответственно угол а управления тиристорами и коэффициент деления
программируемого счетчика 25. Если же сигнал с задатчика 13 частоты меньше выходного сигнала цифроаналогового преобразователя 24, то на выходе блока 14 сравнения имеется отрицательный сигнал
рассогласования, под действием которого срабатывает компаратор 17 и его выходной сигнал разрешает прохождение импульсов с выхода программируемого счетчика 25 через схему 19 совпадения на обратный счетный вход реверсивного счетчика 20. Последний с частотой следования импульсов на выходе программируемого счетчика 25 изменяет свое состояние на единицу в сторону уменьшения до момента равенства сигналов с выхода цифроаналогового преобразователя 24 и с задатчика 13 частоты.
Последовательное уменьшение на единицу состояния счетчика 20 обеспечивает последовательную выборку из другой области памяти запоминающего блока 21 определенных кодов чисел типе соответствии с которыми обеспечивается уменьшение частоты пониженной составляющей напряжения на обмотках статора асинхронного двигателя 1 и последовательная его работа на заданных характеристиках.
Использование программируемых постоянных запоминающих блоков 22 и 23 одновременно с блоком 21 позволяет и в этом случае задавать для каждой ступени соответственно уровень напряжения питания асинхронного двигателя и необходимое время работы.
Использование сигнала с выхода компаратора 16 или 17 в качестве дополнительного адреса для всех программируемых постоянных запоминающих устройств 21- 23 позволяет выбирать различные наборы характеристик для разгона и торможения, поскольку в этом случае одна часть области памяти запоминающих устройств 21-23 отводится для формирования разгона, а другая - для торможения.
Работу устройства рассмотрим на примере электропривода, реализующего семейства характеристик для разгона и торможения, изображенные на фиг.З.
В соответствии с выбранными характеристиками и временами работы на них за- программированыпостоянные
запоминающие блоки 21-23 согласно таблице, представленной на фиг.2, где показа- ны состояния блоков 21-23 и соответствующие им показатели электропривода.
Пусть в исходном состоянии сигнал Ui3 задатчика частоты равен сигналу U24 на выходе цифроаналоговогс преобразователя и оба они равны нулю. При этом программируемые постоянные запоминающие устройства установлены в состояния, соответствующие на фиг.2 номеру № 15. В этом случае m 0, п О и двигатель обесточен.
Если в момент времени to (см. фиг.4) сигнал Ui3 на выходе задатчика 13 частоты изменяется до уровня, определяющего частоту составляющей напряжения на выходе
преобразователя 2, соответствующую работу асинхронного двигателя на характеристике д, то на выходе блока 14 сравнения появляется положительный сигнал рассогласования U14 (фиг.4), под действием кото0 рого срабатывает компаратор 16, и его выходной сигнал Uie обеспечивает прохождение тактовых импульсов от генератора импульсов через программируемый счетчик 25 на выход схемы 18 совпадение (сигнал
5 LHa фиг.4). Под действием сигнала Uis, поступающего на прямой счетный вход реверсивного счетчика 20, последний изменяет свое состояние до тех пор, пока сигнал IJ24 с выхода цифроаналогового преобразовате0 ля 24 не станет равным сигналу Uis с задатчика 13 частоты. При последовательном изменении состояния реверсивного счетчика 20 в соответствии с фиг.2 из состояния N 15 до N 29 последовательно изменяются
5 коды чисел тип, угла управления тиристорами и времени работы на каждом из этих состояний. Выборка параметров системы управления происходит из той области памяти программируемых постоянных запо0 минающих устройств, которая обозначена состояними с номерами от 15 до 29. Это обусловлено тем, что на выходе компаратора 16 до тех пор, пока сигнал с выхода цифроаналогового преобразователя 24 не
5 достигнет сигнала с задатчика 13 частоты, формируется сигнал 1, который подается с компаратора 16 в качестве дополнительного адреса на входы устройств 21-23.
При достижении сигналом U24 уровня
0 сигнала Ui3 на выходе компаратора 16 появляется сигнал О, т.е. изменяется код на дополнительном входе программируемого постоянного запоминающего устройства, . что переводит его из состояния № 29 в со5 стояние № 1. Это состояние характеризует установившийся режим работы электропривода на высокой скорости (характеристика д на фиг.З). Таким образом, в момент подачи сигнала с задатчика скорости до прихо0 да на входы счетчика 20 первого импульса на выходах программируемых постоянных запоминающих устройств установлены коды параметров системы управления, соответствующие состоянию № 15. При этом до
5 момента времени tie (фиг.4) на тиристоры 3-8 преобразователя 2 не подаются управляющие импульсы (так как m 0, п С) и на статорные обмотки двигателя 1 не подается напряжение, на выходе узла 14 сравнения устанавливается положительное напряжение Ун, под действием которого на выходе компаратора 16 появляется сигнал 1 и разрешается прохождение тактовых импульсов через программируемый счетчик 25 на прямой вход счетчика 20. В момент прохождения первого тактового импульса (время tie, фиг.4) устройства 21-23 устанавливаются в состоя ние, соответствующее № 16. При этом m 1, п 7, а 0° и Кдел 2 (фиг.2), что соответствует характеристике а на фиг.З. Время работы на этой характеристике зависит от Кдел. В случае, когда Кдел 2, время работы на характеристике а равно двум периодам следования импульсов генератора 15 и соответствует интервалу от tie до ш (фиг.4). В момент времени ti с выхода программируемого счетчика 25 на прямой вход счетчика 20 проходит второй импульс, который изменяет на единицу состояние счетчика 20 и состояние устройств 21-23 согласно строке Мг 17 (фиг.2).
При этом m 4, п 4, а 50° и Кдел. 2 (фиг.2), что соответствует характеристике б на фиг.З. В этом случае время работы на характеристике б также равно двум периодам следования импульсов генератора 15 и соответствует интервалу от ti до tie (фиг.4).
В момент времени tie приходит следующий импульс на прямой счетный вход счетчика 20, устройства 21-23 и переходят в состояние согласно строке № 18 (фиг.2). При этом m 2, п 6, а 50°, а Кдел 2 (фиг.2), что соответствует характеристике в на фиг.ЗЗ и времени работы на ней с tie до tig (фиг.4).
Аналогично происходят последовательные изменения состояний устройств 21-23 согласно строкам с № 18 по Kb 29. При состояниях, соответствующих строкам Ms 21, № 22 и № 23, Кдел 4, а время работы электропривода в каждом из этих состояний определяется четырьмя периодами следования импульсов генератора .15. При этом в интервалах времени с tie no t2i привод работает на характеристике в, с t2i no t24 - на характеристике г, а с t24 no t29 и далее на характеристике д. В момент времени t29 привод переходит в установившийся режим, при этом на выходе узла 14 сравнения устанавливается напряжение Ui4, равное нулю, которое изменяет напряжение на выходе компаратора 16 из 1 в О, а устройства 21-23 из состояния № 29 (фиг.2) переходят в состояние 1, также соответствующее работе на характеристике д.
Аналогично рассмотренному работает устройство в режимах пуска на малую скорость и перехода с малой скорости на большую. Диаграммы работы устройства для эуих случаев показаны соответственно на фиг.5 и 6.
В первом случае, т.е. при пуске на малую скорость напряжение Ui3 с задатчика частоты выбирается таким, чтобы равенство сигналов с задатчика 13 частоты и с выхода цифроаналогового преобразователя 24 наступало при достижении состояний программируемых постоянных запоминающих устройств 21-23, соответствующих № 19 (фиг.2), т.е. в момент времени tig (фиг.5).
Во втором случае, т.е. при переходе с малой скорости на большую, начальным
значением напряжения 1Нз с задатчика 13 частоты является не нулевое значение, как при пуске, а соответствующее заданному значению при пуске на малую скорость. При этом исходным состоянием устройств 21-23
является состояние, соответствующее строке № 11 (фиг.2). С момента скачкообразного изменения напряжения Ui3 с задатчика частоты до момента прохождения первого так- тового импульса с генератора 15
происходит переход из состояния № 11 в состояние № 19, так как в это время на выходе компаратора N° 18 формируется сигнал 1. Однако при этом работа привода не изменяется, так как не изменяются при этом
параметры системы управления (т 2, п 6, « 50°, Кдел 2), и электропривод продолжает работать на характеристике в. С приходом после этого первого тактового импульса с генератора 15 в устройстве происходит последовательный переход состояний от № 19 до № 29, а при переходе в установившийся режим - из состояния № 29 в состояние N° 1 (как и в рассмотренном случае для пуска на большую скорость).
Диаграмма работы устройства для режима торможения с высокой скоростью на низкую представлена на фиг.7. В исходном положении с задатчика скорости подается напряжение Uis соответствующее работе на
высокой скорости, определяемое состоянием № 1. При этом параметры электропривода m 1, п О, а 0°, Кдел 2 и имеет место установившийся режим работы, при котором напряжение с выхода цифроаналогового преобразователя 24 уже достигло напряжения Ui3, а привод работает на естественной характеристике. При скачкообразном изменении напряжения 1Из (в рассматриваемом случае напряжение 1Нз
уменьшается) в первый момент напряжение с цифроаналогового преобразователя 24 оказывается больше напряжения 1Из. При этом на выходе блока 14 сравнения формируется отрицательное напряжение Un рассогласования, под действием которого на выходе компаратора 17 возникает 1, а на выходе компаратора 16 - О, в результате чего импульсы с генератора 15 через программируемый счетчик 25 и схему 19 совпа- дения поступают на обратный счетный вход счетчика 20. Последний изменяет свое состояние на единицу в сторону уменьшения с частотой следования импульсов программируемого счетчика 25 до момента равенст- ва сигналов с выхода цифроаналогового преобразователя 24 и задатчика частоты 13. Последовательное уменьшение на единицу состояния счетчика 20 обеспечивает последовательную выборку из программируемых постоянных запоминающих блоков 21-23 таких кодов чисел тип, углов а управления тиристоров и коэффициентов деления тактовой частоты, которые соответствуют области памяти указанных блоков согласно номерам состояний с № 1 по № 11 (см. фиг.2). В момент времени tn (фиг.7) напряжение U24 на выходе цифроаналогового преобразователя 24 сравнивается с напряжением Ui3 задания скорости, в результате чего на- пряжение Ui4 принимает нулевое значение, а компараторы 16 и 17 запрещают прохождение тактовых импульсов с генератора 15 на счетные входы счетчика 20. При этом наступает установившийся режим согласно состоянию Nfe 11 (характеристика в).
В результате описанных переключений асинхронный двигатель при работе вхолостую переходит из точке А (фиг.З), соответствующей характеристике д, в точку В на характеристике в путем последовательного перехода по характеристикам е, ж, з, и. При этом исключается зона скоростей, где двигатель развивает движущий момент, что обеспечив-эет надежный процесс электрического торможения двигателя.
Предлагаемое устройство позволяет направленно формировать с нужным темпом переходные процессы, отдельно для пуска (при последовательной работе на характе- ристиках и для торможения (при последовательной работе на характеристиках . Оно также обеспечивает работу на пониженной промежуточной скорости (характеристика в).
Таким образом это устройство позволяет расширить (по сравнению с прототипом) функциональные возможности по формированию процессов пуска, торможения и регу- лирования скорости асинхронного электропривода.
Повышенная плавность и надежность регулирования скорости приводного двигателя (обусловленная отсутствием тахогене- ратора в системе регулирования) в предлагаемом устройстве обеспечивают удобство обслуживания крановых механизмов, повышение их производительности и точности остановки грузов.
Формула изобретения
Устройство для управления асинхронным электродвигателем по авт.св. № 1252898, отличающееся тем, что, с целью расширения функциональных возможностей, в него введены программируемый счетчик, узел задания управляющего сигнала и два програмируемых постоянных запоминающих блока, а первый программируемый постоянный запоминающий блок снабжен дополнительным адресным входом, при этом программируемый счетчик включен между выходом генератора тактовых импульсов и объединенными вторыми входами схем совпадения, вход переключения коэффициента деления программируемого счетчика соединен с выходом первого дополнительного программируемого постоянного запоминающего блока, узел задания управляющего сигнала соединен входом с выходом второго дополнительного программируемого постоянного запоминающего блока и выходом с управляющим входом блока фазосмещения и распределения управляющих импульсов, адресные входы второго и третьего программируемых постоянных запоминающих блоков соединены с соответствующими адресными входами первого программируемого запоминающего блока, дополнительный адресный вход которого соединен с соответствующими адресными входами второго и третьего программируемых постоянных запоминающих блоков и выходом одного из компараторов.
Фиг.2
со
C-.
s е
02
178117Ш
61
.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1810978A1 |
| Устройство для управления асинхронным электродвигателем | 1984 |
|
SU1252898A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2373624C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1984 |
|
SU1365327A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Способ регулирования частоты вращения асинхронного электропривода и устройство для его осуществления | 1987 |
|
SU1554104A1 |
| Устройство для автоматической стабилизации скорости шлифования | 1982 |
|
SU1046077A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |

Изобретение относится к электротехнике, в частности к асинхронным электроприводам с регулированием частоты вращения электродвигателей общепромышленных механизмов. В результате введения программируемого счетчика, узла задания управляющего сигнала и двух программируемых постоянных запоминающих блоков обеспечивается ступенчатая отработка сигнала задания скорости и последовательный перевод электропривода по выбранным механическим характеристикам на требуемую характеристику в режимах программного пуска на малую скорость, программного пуска на большую скорость и программного торможения, чем достигается расширение функциональных возможностей. 7 ил. Ј
| Устройство для управления асинхронным электродвигателем | 1984 |
|
SU1252898A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
