СП
сд


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления кипным питателем с верхним отбором волокна | 1986 |
|
SU1416540A1 |
| Устройство управления кипным питателем с верхним отбором волокна | 1986 |
|
SU1392153A1 |
| Регулятор производительности кипного разрыхлителя с верхним отбором волокна | 1986 |
|
SU1341262A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПЕРЕРАБОТКИ ВОЛОКНИСТОГО МАТЕРИАЛА | 1990 |
|
RU2016925C1 |
| Устройство для стабилизации производительности батареи кипоразборщиков | 1985 |
|
SU1276693A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1550548A1 |
| Устройство для стабилизации производительности кипоразборщика | 1982 |
|
SU1039994A1 |
| Устройство для определения статических параметров отцепов на сортировочной горке | 1985 |
|
SU1320107A1 |
| Цифроаналоговый преобразователь с автоматической коррекцией нелинейности | 1988 |
|
SU1594699A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки (ЭЛТ) | 1988 |
|
SU1509862A1 |

Изобретение относится к текстильной промышленности и позволяет повысить технологические возможности устройства. С этой целью в устройство введены блок определения координат киповых групп, блок контроля промежутков между киповыми группами, блок определения количества киповых групп и определения промежутков между киповыми группами, датчики перемещения тележки, элементы ИЛИ и блок индикации. Информация о координатах начала киповых групп заносится в регистры блока определения координат киповых групп, а информацию о координатах конца киповых групп - в регистры блока определения координат киповых групп с учетом ширины разборщика. Блок контроля промежутков между киповыми группами посредством элемента ИЛИ связан с датчиками крайнего правого положения тележки, крайнего левого положения тележки, перемещения тележки, определения промежутков и позволяет получить световую информацию на блоке индикации о правильности соблюдения расстояния между киповыми группами, а также между киповыми группами и крайними положениями тележки. Блок определения количества киповых групп подключен к входу блока определения координат кип к датчику определения промежутков и к входу элемента ИЛИ. 1 з.п. ф-лы, 7 ил.
Изобретение относится к текстильной промышленности и может быть использовано в приготовительно-прядильном производстве.
Цель изобретения - расширение технологических возможностей.
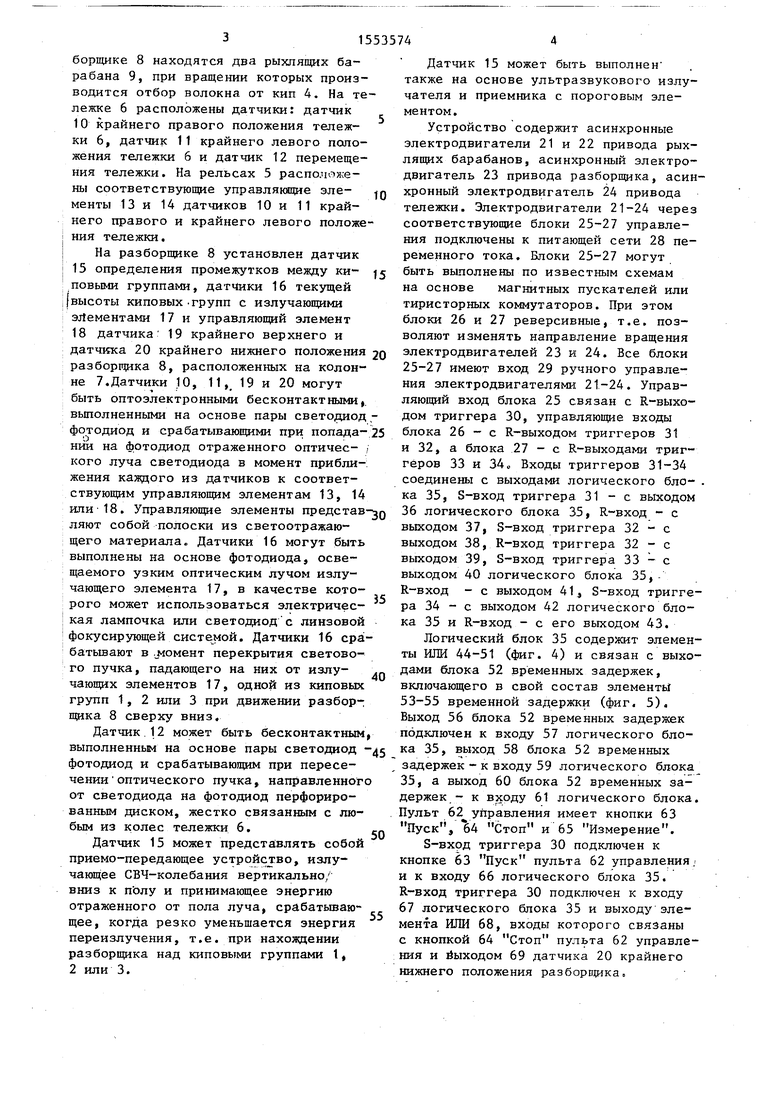
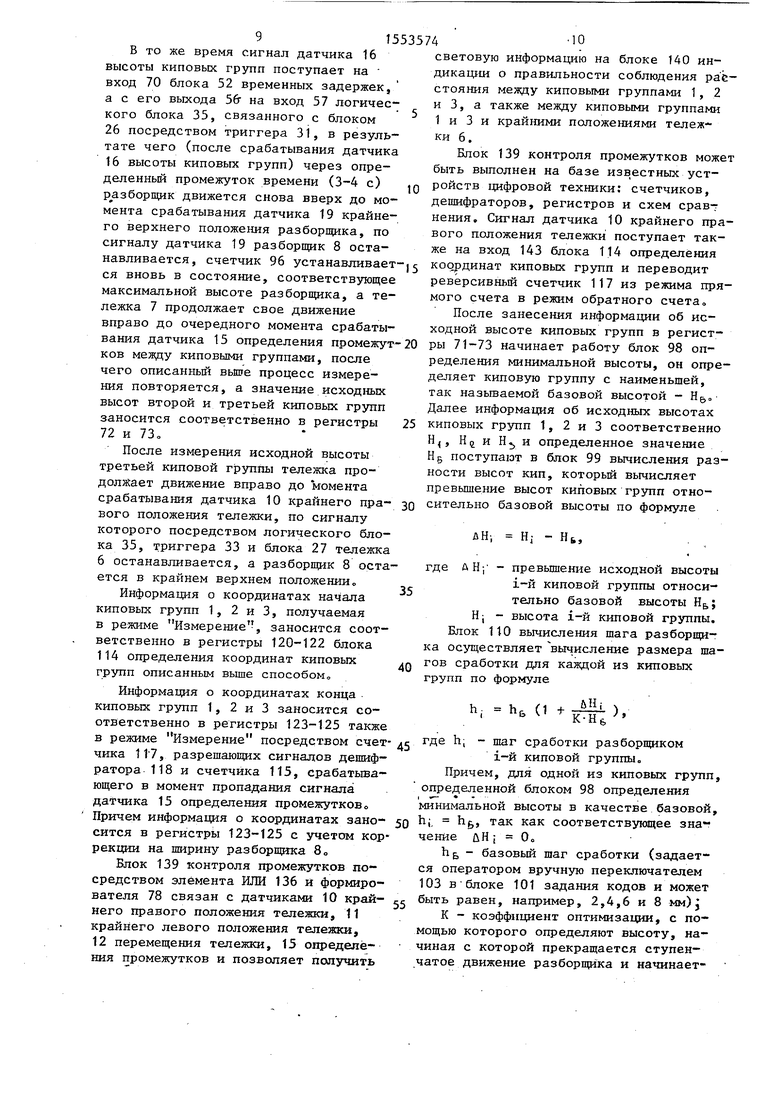
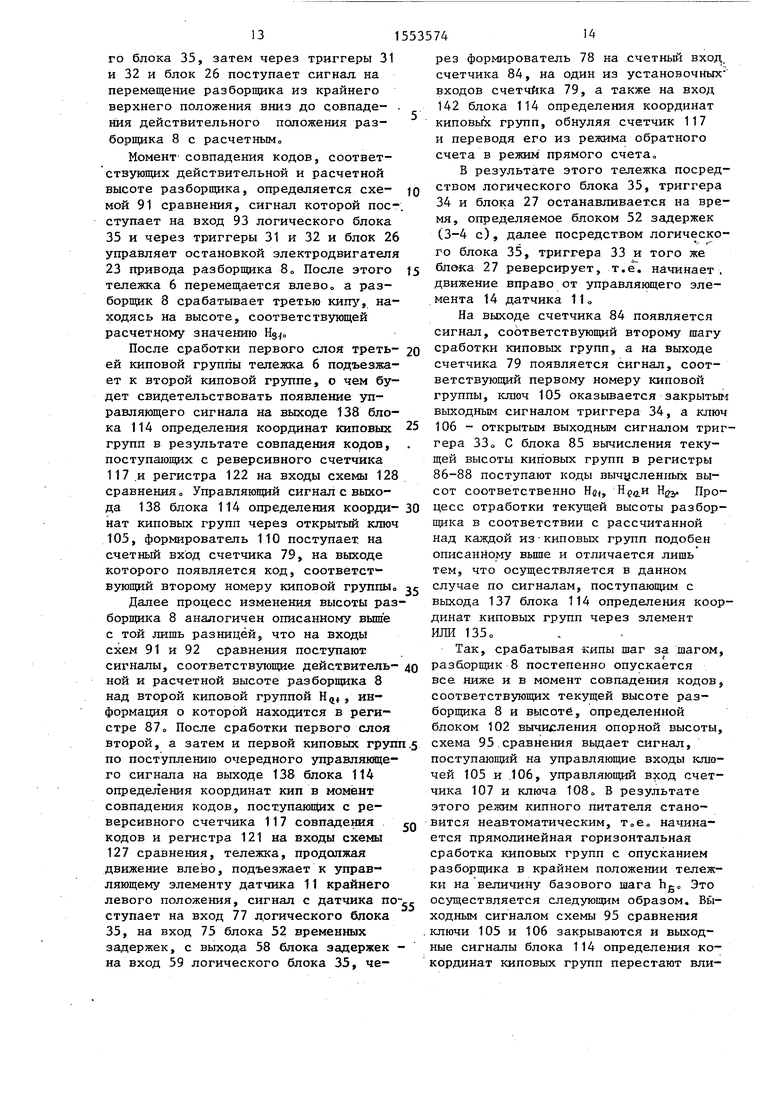
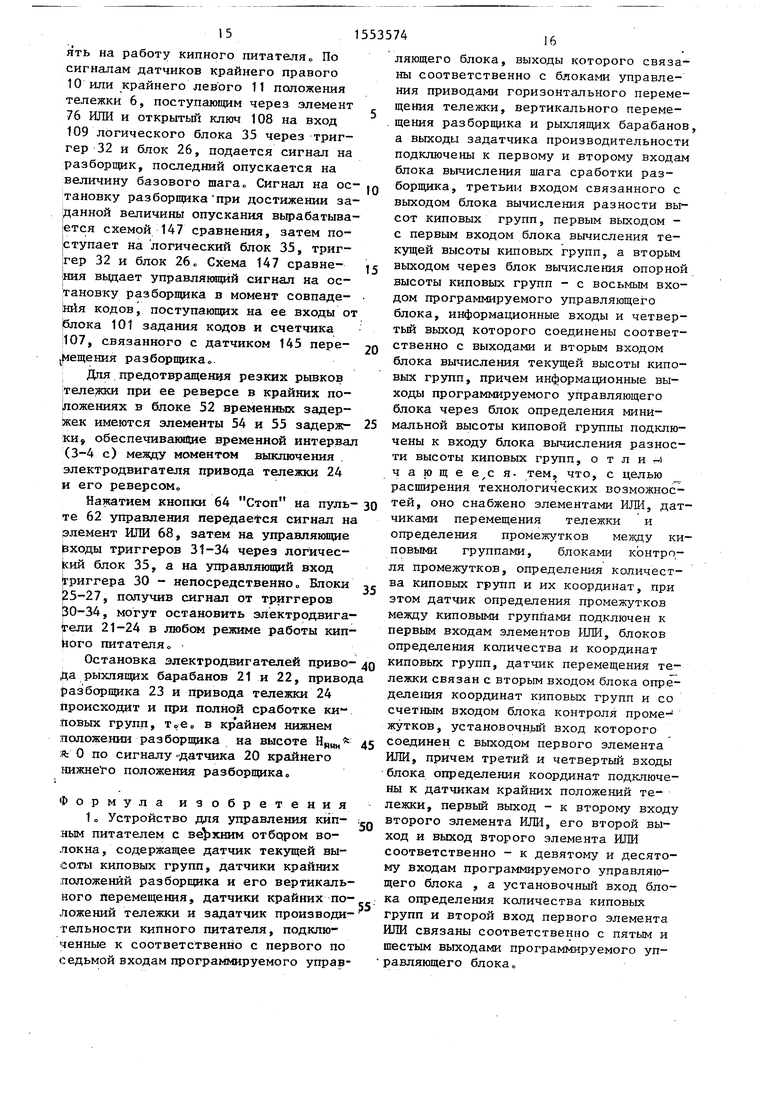
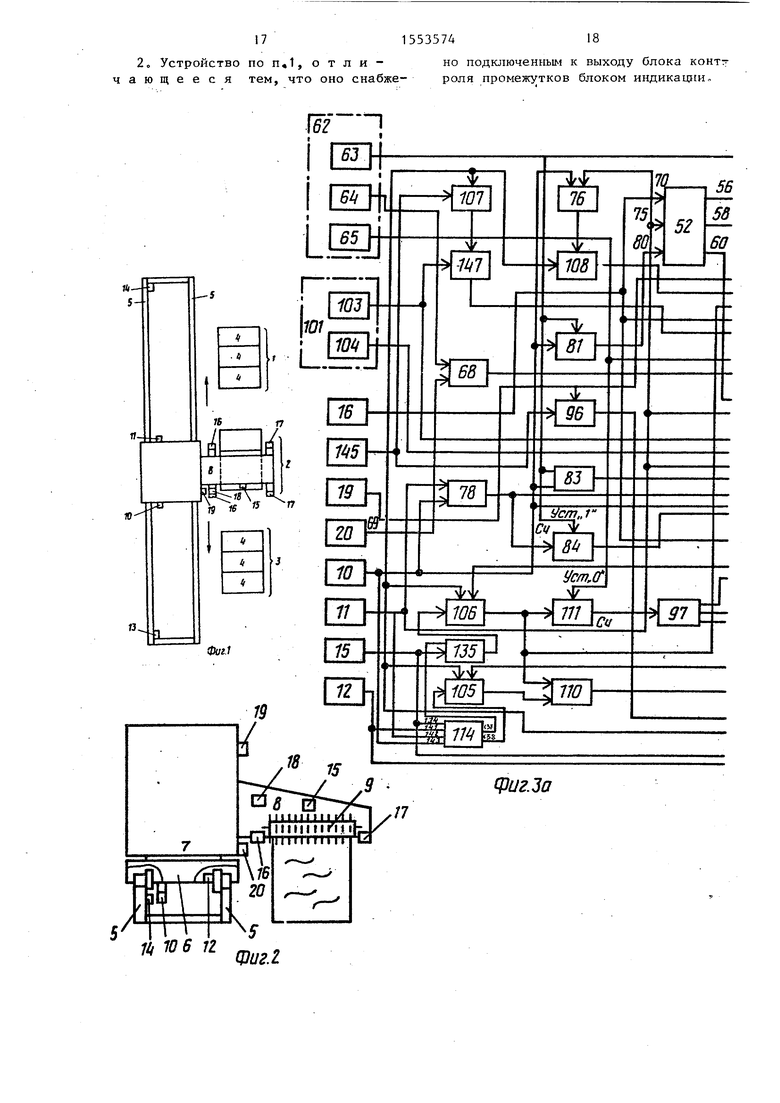
На фиг. 1 изображен кипный питатель с расположенными на нем основными датчиками технологических параметров кипного питателя, вид сверху} на фиг. 2 - то же, вид сбоку; на фиг. 3 - структурная схема-устройства управления кипным питателем; на
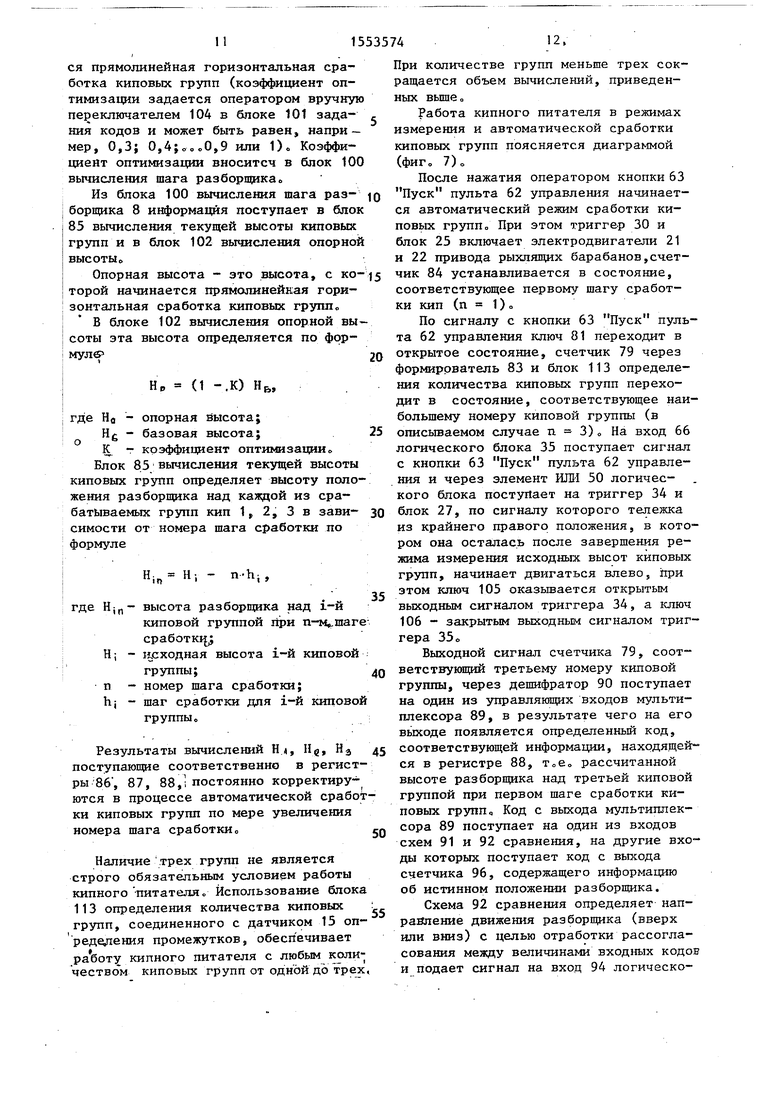
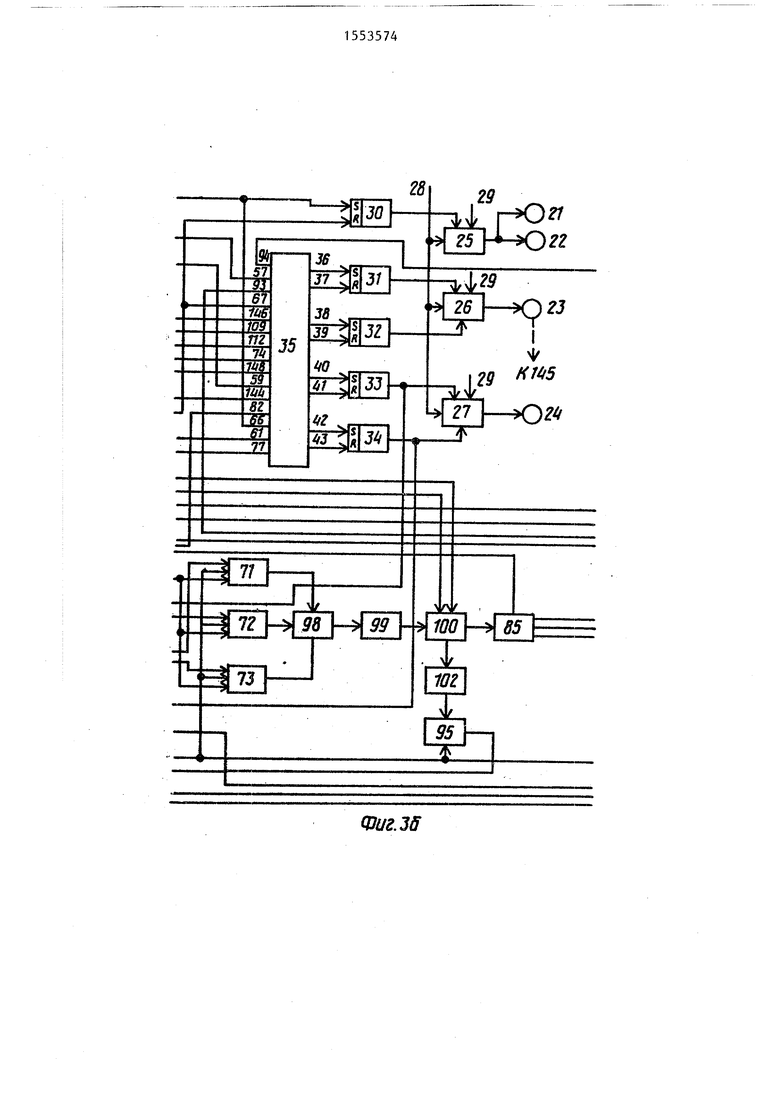
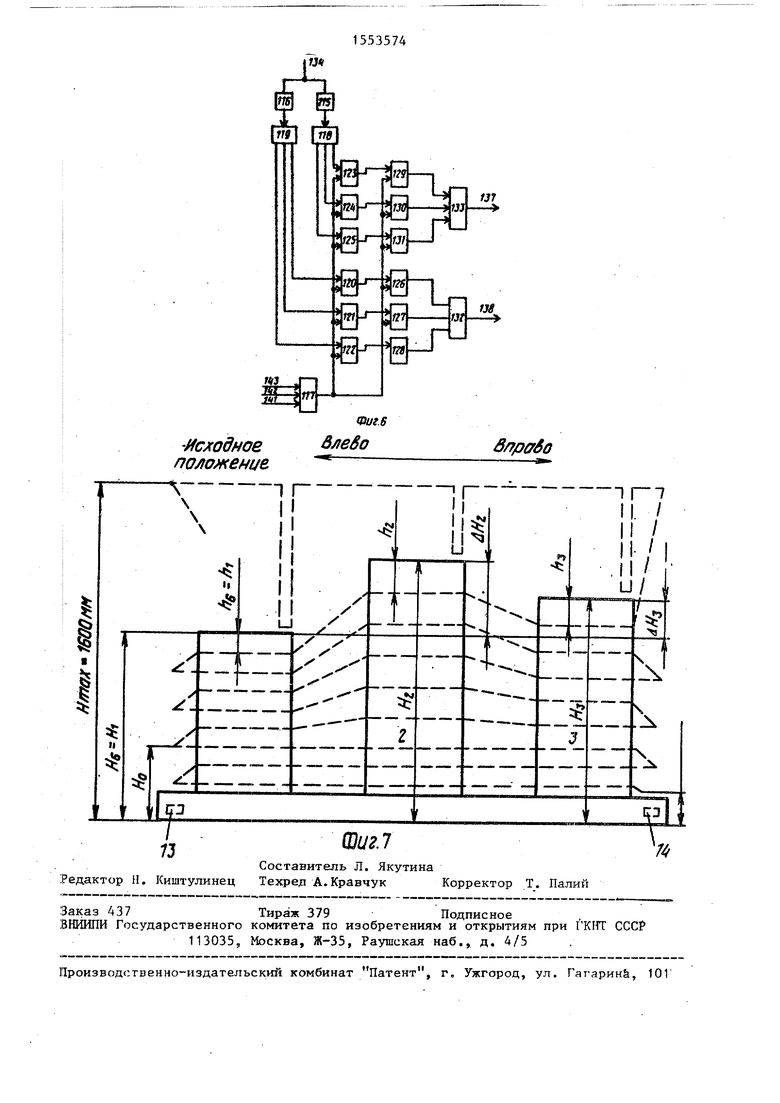
фиг. 4 - схема логического блока (сумматора); на фиг. 5 - схема блока временных задержек; на фиг. 6 - схема блока определения координат киповых групп; на фиг. 7 - диаграмма работы кипного питателя в режимах измерения и автоматической сработки киповых групп.
Вдоль киповых групп 1, 2 и 3, состоящих из хлопковых Kin 4, уложены рельсы 5, по которым передвигается тележка 6 кипного питателя, несущая на себе колонку 7 с разборщиком 8. В разел
борщике 8 находятся два рыхлящих барабана 9, при вращении которых производится отбор волокна от кип 4. На тележке 6 расположены датчики: датчик 10 крайнего правого положения тележки 6, датчик 11 крайнего левого положения тележки 6 и датчик 12 перемещения тележки. На рельсах 5 расположены соответствующие управляющие эле- менты 13 и 14 датчиков 10 и 11 крайнего правого и крайнего левого положения тележки.
На разборщике 8 установлен датчик 15 определения промежутков между ки- повыми группами, датчики 16 текущей высоты киповых .групп с излучающими элементами 17 и управляющий элемент 18 датчика 19 крайнего верхнего и
датчкка 20 крайнего нижнего положения 20 электродвигателей 23 и 24. Все блоки
разборщика 8, расположенных на колонне 7.Датчики 10, 11, 19 и 20 могут быть оптоэлектронными бесконтактными, выполненными на основе пары светодиод - фотодиод и срабатывающими при попада- 25 нйи на фотодиод отраженного оптичес- , кого луча светодиода в момент приближения каждого из датчиков к соответствующим управляющим элементам 13, 14
25-27 имеют вход 29 ручного управления электродвигателями 21-24. Управляющий вход блока 25 связан с R-выхо- дом триггера 30, управляющие входы блока 26 - с R-выходом триггеров 31 и 32, а блока 27 - с R-выходами триггеров 33 и 34„ Входы триггеров 31-34 соединены с выходами логического блока 35, S-вход триггера 31 - с выходом
или 18. Управляющие элементы представ-зд 36 логического блока 35, R-вход - с
35
ляют собой полоски из светоотражающего материала. Датчики 16 могут быть выполнены на основе фотодиода, освещаемого узким оптическим лучом излучающего элемента 17, в качестве которого может использоваться электрическая лампочка или светодиод с линзовой фокусирующей системой. Датчики 16 срабатывают в .момент перекрытия светового пучка, падающего на них от излу- , чающих элементов 17, одной из киповых групп 1,2 или 3 при движении разборщика 8 сверху вниз.
Датчик 12 может быть бесконтактным,
выходом 37, S-вход триггера 32 - с выходом 38, R-вход триггера 32 - с выходом 39, S-вход триггера 33 - с выходом 40 логического блока 35, R-вход - с выходом 41 j S-вход тригг ра 34 - с выходом 42 логического бло ка 35 и R-вход - с его выходом 43.
Логический блок 35 содержит элеме ты ИЛИ 44-51 (фиг. 4) и связан с вых дами блока 52 временных задержек, включающего в свой состав элементы 53-55 временной задержки (фиг. 5). Выход 56 блока 52 временных задержек подключен к входу 57 логического бло
выполненным на основе пары светодиод -45 ка 35, выход 58 блока 52 временных
фотодиод и срабатывающим при пересечении оптического пучка, направленного от светодиода на фотодиод перфорированным диском, жестко связанным с любым из колес тележки 6.
Датчик 15 может представлять собой приемо-передающее устройство, излучающее СВЧ-колебания вертикально/ вниз к п олу и принимающее энергию отраженного от пола луча, срабатывающее, когда резко уменьшается энергия переизлучения, т.е. при нахождении разборщика над киповыми группами 1, 2 или 3.
50
55
задержек - к входу 59 логического блок 35, а выход 60 блока 52 временных за держек - к входу 61 логического блок Пульт 62 управления имеет кнопки 63 Пуск, 64 Стоп и 65 Измерение.
S-вход триггера 30 подключен к кнопке 63 Пуск пульта 62 управлени и к входу 66 логического блока 35. R-вход триггера 30 подключен к входу 67 логического блока 35 и выходу эле мента ИЛИ 68, входы которого связаны с кнопкой 64 Стоп пульта 62 управл ния и йыходом 69 датчика 20 крайнего нижнего положения разборщика.
Датчик 15 может быть выполнен также на основе ультразвукового излучателя и приемника с пороговым элементом.
Устройство содержит асинхронные электродвигатели 21 и 22 привода рыхлящих барабанов, асинхронный электродвигатель 23 привода разборщика, асинхронный электродвигатель 24 привода тележки. Электродвигатели 21-24 через соответствующие блоки 25-27 управления подключены к питающей сети 28 переменного тока. Блоки 25-27 могут быть выполнены по известным схемам на основе магнитных пускателей или тиристорных коммутаторов. При этом блоки 26 и 27 реверсивные, т.е. позволяют изменять направление вращения
25-27 имеют вход 29 ручного управления электродвигателями 21-24. Управляющий вход блока 25 связан с R-выхо- дом триггера 30, управляющие входы блока 26 - с R-выходом триггеров 31 и 32, а блока 27 - с R-выходами триггеров 33 и 34„ Входы триггеров 31-34 соединены с выходами логического бло ка 35, S-вход триггера 31 - с выходом
36 логического блока 35, R-вход - с
выходом 37, S-вход триггера 32 - с выходом 38, R-вход триггера 32 - с выходом 39, S-вход триггера 33 - с выходом 40 логического блока 35, R-вход - с выходом 41 j S-вход триггера 34 - с выходом 42 логического блока 35 и R-вход - с его выходом 43.
Логический блок 35 содержит элементы ИЛИ 44-51 (фиг. 4) и связан с выходами блока 52 временных задержек, включающего в свой состав элементы 53-55 временной задержки (фиг. 5). Выход 56 блока 52 временных задержек подключен к входу 57 логического блока 35, выход 58 блока 52 временных
задержек - к входу 59 логического блока 35, а выход 60 блока 52 временных задержек - к входу 61 логического блока. Пульт 62 управления имеет кнопки 63 Пуск, 64 Стоп и 65 Измерение.
S-вход триггера 30 подключен к кнопке 63 Пуск пульта 62 управления и к входу 66 логического блока 35. R-вход триггера 30 подключен к входу 67 логического блока 35 и выходу элемента ИЛИ 68, входы которого связаны с кнопкой 64 Стоп пульта 62 управления и йыходом 69 датчика 20 крайнего нижнего положения разборщика.
Вход 70 блока 52 временных задержек подключен к датчику 16 текущей высоты киповых групп, к синхронизирующим входам регистров 71-73 памяти и входу 74 логического блока 35. Вход 75 блока 52 временных задержек соединен с входом элемента ИЛИ 76, входом 77 логического блока 35, с датчиком 11 крайнего левого положения тележки 6, с входом формирователя 78, с одним из установочных входов счетчика 79 о
Вход 80 блока 52 временных задержек
соединен с выходом ключа 81, информа- дами формирователя 110, причем выход
ционный вход которого связан с входомключа 106 подсоединен к счетному входу
82 логического блока 35, с входомсуммирующего счетчика 111 и входу 112
элемента ИЛИ 76, с входами формирова-логического блока 35.
телей 83 и 78 и датчиком 10 крайнегоющего счетчика 111 и входу 112 ло20
правого положения тележки 6„ Управляющий вход ключа 81 подключен к кнопке 63 Пуск пульта 62 управления, входу формирователя 83, установочному входу суммирующего счетчика 84, вход которого связан с выходом формирователя 78, а выход - с входом блока 85 вычисления текущей высоты киповых группо Выход блока 85 подключены к информационным входам регистров 86-88 выходы которых связаны с информационными входами мультиплексора 89„ Управляющие входы мультиплексора 89 соединены с выходами дешифратора 90, а выход мультиплексора - с входами схем 91 и 92 сравнения, выходы которых связаны с входами 93 и 94 логического блока 35 о Вторые входы схем 91 и 92 сравнения подключены к входу схемы 95 сравнения, выходу вычитающего счетчика 96 и информационным входам регистров 71-73, управляющие входы которых соединены с выходами дешифратора 97 команд, а выходы - с блоком 98 определения минимальной высоты киповой группы Выход блока 98 связан с входом блока 99 вычисления разности высот кип, выход которого соединен с входом блока 100 вычисления шага сработки разборщика, другие два выхода которого подключены к выходам блока 101 задания кодов (задат- чик производительности), а выходы - к блоку 85 вычисления текущей высоты киповых групп и блоку 102 вычисления опорной высоты, причем выход последнего связан с входом схемы 95 сравнения о
Блок 101 задания кодов имеет переключатели 103 шага сработки киповых
25
30
гического блока 35„
Выход формирователя 110 связан с счетным входом счетчика 79, другой установочный вход которого подключен к выходу блока 113 определения количества киповых групп, причем выход формирователя 83 соединен с установочным входом блока 113 определения количества киповых групп,
Блок 114 определения координат кип (фиГо 6) содержит счетчики 115-117, дешифраторы 118 и 119, регистры 120- 125, схемы 126-131 сравнения и логические элементы ИЛИ 132 и 133, причем выход счетчика 115 соединен с входом дешифратора 118, выходы которого подключены к управляющим входам регистров 123-125 соответственно, выход счетчика 116 связан с входом дешифратора 119, выходы которого соединены с управляющими входами регистров 120- 122 соответственно, а информационные входы регистров 120-125 и один из входов схем 126-131 сравнения подключены к выходу реверсивного счетчика 117, входы логического элемента ИЛИ 132 соединены с выходами схем 126-128 сравнения, другие входы которых связаны с выходами регистров 120-122 соответственно, входы логического эле- 5Q мента ИЛИ 133 соединены с выходами схем 129-131 сравнения, другие входы которых связаны с выходами регистров 123-125 соответственно.
Счетный вход блока 113 определения количества киповых групп подключен к входу 134 блока 114 определения координат киповых групп, к датчику 15 определения промежутков, к входу элемен- та ИЛИ 135 и к входу элемента ИЛИ 136,
35
40
45
55
групп и 104 коэффициента оптимизации.
Выход схемы 95 сравнения соединен с управляющими входами ключей 105 и 106, управляющим входом суммирующего счетчика 107 и информационным входом ключа 108, управляющий вход которого связан с выходом логического элемента 76 ИЛИ,а выход - с входом 109 логического блока (сумматора) 35„
Другие управляющие входы ключей 105 и 106 подключены к выходам триггеров 34 и 33 соответственно, а выходы ключей 105 и 106 соединены с вхо0
5
0
гического блока 35„
Выход формирователя 110 связан с счетным входом счетчика 79, другой установочный вход которого подключен к выходу блока 113 определения количества киповых групп, причем выход формирователя 83 соединен с установочным входом блока 113 определения количества киповых групп,
Блок 114 определения координат кип (фиГо 6) содержит счетчики 115-117, дешифраторы 118 и 119, регистры 120- 125, схемы 126-131 сравнения и логические элементы ИЛИ 132 и 133, причем выход счетчика 115 соединен с входом дешифратора 118, выходы которого подключены к управляющим входам регистров 123-125 соответственно, выход счетчика 116 связан с входом дешифратора 119, выходы которого соединены с управляющими входами регистров 120- 122 соответственно, а информационные входы регистров 120-125 и один из входов схем 126-131 сравнения подключены к выходу реверсивного счетчика 117, входы логического элемента ИЛИ 132 соединены с выходами схем 126-128 сравнения, другие входы которых связаны с выходами регистров 120-122 соответственно, входы логического эле- Q мента ИЛИ 133 соединены с выходами схем 129-131 сравнения, другие входы которых связаны с выходами регистров 123-125 соответственно.
Счетный вход блока 113 определения количества киповых групп подключен к входу 134 блока 114 определения координат киповых групп, к датчику 15 определения промежутков, к входу элемен- та ИЛИ 135 и к входу элемента ИЛИ 136,
5
0
5
5
другой вход которого соединен с выходом формирователя 78„ Выход 137 блока 114 определения координат связан с другим входом логического элемента ИЛИ 135, выход которого соединен с информационным входом ключа 106, а выход 138 блока 114 подключен к информационному входу ключа 1U5. Выход элемента ИЛИ 136 связан с установоч- ным входом блока 139 контроля промежутков, выход которого соединен с блоком 140 индикации, а счетный вход подключен к выходу датчика 12 перемещения тележки и к входу 141 блока 114 определения координат киповых групп, причем входы 142 и 143 этого блока связаны с датчиками 11 крайнего левого положения тележки и 10 крайнего бравого положения тележки соответ- ственно0
Выход счетчика 111 соединен с входом дешифратора 97 команд, а установочный вход - с кнопкой 65 Измерение пульта 62 управления и входом 114 логнческого блока 35 ,
Счетный вход счетчика 107 подключе к датчику 145 перемещения разборщика и счетному входу вычитающего счетчика 96, установочный вход которого соединен с датчиком 19 крайнего верхнего положения разборщика и входом 146 логического блока 35 „
Выход счетчика 107 связан с входом схемы 147 сравнения, другой вход ко- торой соединен с одним из выходов блока 101 задания кодов, а выход - с входом 148 логического блока.
Устройство работает следующим об- разомо
Для обеспечения основного автоматического режима работы кипного питателя необходимо провести измерение исходных высот киповых групп 1, 2 и 3, для чего оператор с помощью пода- чи сигналов ручного управления на блоки 26 и 27 управления двигателей 23 и 24 привода разборщика и тележки устанавливает разборщик в крайнее верхнее положение, а тележку - в крайнее левое
С помощью блока 101 задания кодов оператор устанавливает требуемую производительность кипного питателя, пе- реключателем 103 - шаг сработки киповых групп и переключателем 104 - коэффициент оптимизации, затем вводит в блок 100 вычисления шага разборщика коэфозициент, учитывающий отличие
объемных плотностей срабатываемых киповых групп
После нажатия оператором кнопки 65 Измерение на пульте 62 управления начинается процесс измерения исходных высот киповых групп„ При этом тележка 6 начинает свое движение вправо, счетчик 111 устанавливается в О состояние, а в счетчик 96 сигналом датчика 19 крайнего верхнего положения разборщика записывается число, соответствующе крайнему верхнему положению разборщика (1600 мм), ключ 105 устанавливается в закрытое состояние выходным сигналом триггера 34, а ключ 106 - в открытое состояние выходным сигналом триггера 33.
При движении тележки 6 вправо при приближении ее к первой группе кип 1 срабатывает датчик 15 определения промежутков о При этом фиксируется расстояние от крайнего левого положения тележки до начала первой киповой группыо Сигнал датчика 15 через элемент ИЛИ 135 и ключ 106 регистрируется счетчиком 111 о Код состояния его поступает на дешифратор 97 команд, который формирует на управляющем входе регистра 71 разрешающий сигнал для записи информации об исходной высоте первой группы кип 1 , Сигнал датчика 15 определения промежутков поступает и на вход 134 блока 114 определения координат киповых групп, где регистрируется счетчиком 116, который управляет работой дешифратора 119,разрешающего в данный момент запись информации о координате начала киповой группы 1 от датчика 12 перемещения тележки посредством счетчика 117 в регистр 120о Кроме того, сигнал датчика 15 определения промежутков через элемент ИЛИ 135 и ключ 106 поступает на вход 112 логического блока 35, в результате чего триггеры 32 и 33 изменяют свои состояния на противоположные, после чего посредством блоков 26 и 27 тележка 6 останавливается, а разборщик 8 опускается до момента пересечения его с поверхностью кипы, тово до момента срабатывания датчика 16 высоты киповых групп, по сигналу которого значение исходной высоты первой киповой группы 1, зафиксированное счетчиком 96 с помощью .датчика перемещения разборщика, заносится по информационному входу в регистр 71.
В то же время сигнал датчика 16 высоты киповых групп поступает на вход 70 блока 52 временных задержек, а с его выхода 56г на вход 57 логического блока 35, связанного с блоком 26 посредством триггера 31, в резуль- тате чего (после срабатывания датчика 16 высоты киповых групп) через определенный промежуток времени (3-4 с) разборщик движется снова вверх до момента срабатывания датчика 19 крайнего верхнего положения разборщика, по сигналу датчика 19 разборщик 8 останавливается, счетчик 96 устанавливает- координат киповых групп и переводит
ся вновь в состояние, соответствующеереверсивный счетчик 117 из режима прямаксимальной высоте разборщика, а те-мого счета в режим обратного счета о лежка 7 продолжает свое движениеПосле занесения информации об исвправо до очередного момента срабаты-ходной высоте киповых групп в региствания датчика 15 определения промежут-20ры 71-73 начинает работу блок 98 оп
ков между киповыми группами, после чего описанный выше процесс измерения повторяется, а значение исходных высот второй и третьей киповых групп заносится соответственно в регистры 72 и 73о
После измерения исходной высоты третьей киповой группы тележка продолжает движение вправо до момента срабатывания датчика 10 крайнего правого положения тележки, по сигналу которого посредством логического блока 35, триггера 33 и блока 27 тележка 6 останавливается, а разборщик 8 остается в крайнем верхнем положении
Информация о координатах начала киповых групп 1, 2 и 3, получаемая в режиме Измерение, заносится соответственно в регистры 120-122 блока 114 определения координат киповых групп описанным выше способом,,
Информация о координатах конца киповых групп 1, 2 и 3 заносится соответственно в регистры 123-125 также в режиме Измерение посредством счет чика 117, разрешающих сигналов дешифратора 118 и счетчика И5, срабатывающего в момент пропадания сигнала датчика 15 определения промежутково Причем информация о координатах заносится в регистры 123-125 с учетом кор рекции на ширину разборщика 80
Блок 139 контроля промежутков посредством элемента ИЛИ 136 и формирователя 78 связан с датчиками 10 крайнего правого положения тележки, 11 крайнего левого положения тележки, 12 перемещения тележки, 15 определения промежутков и позволяет получить
световую информацию на блоке 140 индикации о правильности соблюдения расстояния между киповыми группами 1, 2 и 3, а также между киповыми группами 1 и 3 и крайними положениями тележки 6.
Блок 139 контроля промежутков может быть выполнен на базе известных устройств цифровой техники: счетчиков, дешифраторов, регистров и схем сравнения Сигнал датчика 10 крайнего правого положения тележки поступает также на вход 143 блока 114 определения
ределения минимальной высоты, он определяет киповую группу с наименьшей, так называемой базовой высотой - Нь„ Далее информация об исходных высотах киповых групп 1, 2 и 3 соответственно Нг и Н., и определенное значение НБ поступают в блок 99 вычисления разности высот кип, который вычисляет превышение высот киповых групп относительно базовой высоты по формуле
где
АН,
АН;
н
ь
5
0
Н. превышение исходной высоты i-й киповой группы относительно базовой высоты Нь; высота i-й киповой группы. Блок 110 вычисления шага разборщика осуществляет вычисление размера шагов сработки для каждой из киповых групп по формуле
h, hb (I +
К-Н&
),
где h, - шаг сработки разборщиком i-й киповой группы.
Причем, для одной из киповых групп, определенной блоком 98 определения минимальной высоты в качестве базовой, h; hg, так как соответствующее значение ДН ; О.
h ь - базовый шаг сработки (задается оператором вручную переключателем 103 в блоке 101 задания кодов и может быть равен, например, 2,4,6 и 8 мм) j
К - коэффициент оптимизации, с помощью которого определяют высоту, начиная с которой прекращается ступенчатое движение разборщика и начинается прямолинейная горизонтальная сра- ботка киповых групп (коэффициент оптимизации задается оператором вручную переключателем 104 в блоке 101 задания кодов и может быть равен, напри - мер, 0,3; 0,4;0„оО,9 или 1)« Коэффициент оптимизации вноситсч в блок 100 вычисления шага разборщикао
Из блока 100 вычисления шага раз- JQ борщика 8 информация поступает в блок 85 вычисления текущей высоты киповых групп и в блок 102 вычисления опорной
ВЫСОТЫо
Опорная высота - это высота, с ко-15 торой начинается прямолинейная горизонтальная сработка киповых групп,
В блоке 102 вычисления опорной высоты эта высота определяется по формуле 20
Н,
(1 -.К) Н
ь
где На - опорная высота;
Н6 - базовая высота;25
К - коэффициент оптимизации,, Блок 85 вычисления текущей высоты киповых групп определяет высоту положения разборщика над каждой из срабатываемых групп кип 1, 2, 3 в зави- 30 симости от номера шага сработки по формуле
Н,„« Н; - n-h,,
35
где Н(П- высота разборщика над 1-й
киповой группой при
сработки Н; - исходная высота i-й киповой
группы;40
п - номер шага сработки; hj - шаг сработки для i-й киповой
группыо
Результаты вычислений Н, Не, Н3 д5 поступающие соответственно в регистры 86, 87, 88,1 постоянно корректируются в процессе автоматической сработки киповых групп по мере увеличения номера шага сработки,
50
Наличие трех групп не является строго обязательным условием работы кипного питателя о Использование блока 113 определения количества киповых групп, соединенного с датчиком 15 оп ределения промежутков, обеспечивает ра боту кипного питателя с любым количеством киповых групп от одной до трех,
Q
5
0
5
0
5
0
5
0
5
При количестве групп меньше трех сокращается объем вычислений, приведенных выше
Работа кипного питателя в режимах измерения и автоматической сработки киповых групп поясняется диаграммой (фиго 7) о
После нажатия оператором кнопки 63 Пуск пульта 62 управления начинается автоматический режим сработки киповых группо При этом триггер 30 и блок 25 включает электродвигатели 21 и 22 привода рыхлящих барабанов,счетчик 84 устанавливается в состояние, соответствующее первому шагу сработки кип (п 1)о
По сигналу с кнопки 63 Пуск пульта 62 управления ключ 81 переходит в открытое состояние, счетчик 79 через формирователь 83 и блок 113 определения количества киповых групп переходит в состояние, соответствующее наибольшему номеру киповой группы (в описываемом случае п 3)„ На вход 66 логического блока 35 поступает сигнал с кнопки 63 Пуск пульта 62 управления и через элемент ИЛИ 50 логического блока поступает на триггер 34 и блок 27, по сигналу которого тележка из крайнего правого положения, в котором она осталась после завершения режима измерения исходных высот киповых групп, начинает двигаться влево, при этом ключ 105 оказывается открытым выходным сигналом триггера 34, а ключ 106 - закрытым выходным сигналом триггера 35 о
Выходной сигнал счетчика 79, соответствующий третьему номеру киповой группы, через дешифратор 90 поступает на один из управляющих входов мультиплексора 89, в результате чего на его выходе появляется определенный код, соответствующей информации, находящейся в регистре 88, т0е, рассчитанной высоте разборщика над третьей киповой группой при первом шаге сработки киповых групп. Код с выхода мультиплексора 89 поступает на один из входов схем 91 и 92 сравнения, на другие входы которых поступает код с выхода счетчика 96, содержащего информацию об истинном положении разборщика.
Схема 92 сравнения определяет направление движения разборщика (вверх или вниз) с целью отработки рассогласования между величинами входных кодов и подает сигнал на вход 94 логического блока 35, затем через триггеры 31 и 32 и блок 26 поступает сигнал, на перемещение разборщика из крайнего верхнего положения вниз до совпаде- . ния действительного положения разборщика 8 с расчетным,,
Момент совпадения кодов, соответствующих действительной и расчетной высоте разборщика, определяется схемой 91 сравнения, сигнал которой пос-. ступает на вход 93 логического блока 35 и через триггеры 31 и 32 и блок 26 управляет остановкой электродвигателя 23 привода разборщика 8„ После этого тележка 6 перемещается влево, а разборщик 8 срабатывает третью кипу, находясь на высоте, соответствующей расчетному значению Нз
После сработки первого слоя треть- 20 сработки киповых групп, а на выходе
ей киповой группы тележка б подъезжает к второй киповой группе, о чем будет свидетельствовать появление управляющего сигнала на выходе 138 блока 114 определения координат киповых групп в результате совпадения кодов, поступающих с реверсивного счетчика 117 .и регистра 122 на входы схемы 128 сравнения, Управляющий сигнал с выхосчетчика 79 появляется сигнал, соответствующий первому номеру киповой группы, ключ 105 оказывается закрыты выходным сигналом триггера 34, а клю 25 106 - открытым выходным сигналом три гера 33о С блока 85 вычисления текущей высоты киповых групп в регистры 86-88 поступают коды вычисленных высот соответственно На«, Неаи еу Про
да 138 блока 114 определения коорди- 30 цесс отработки текущей высоты разборнат киповых групп через открытый ключ 105, формирователь 110 поступает, на счетный вход счетчика 79, на выходе которого появляется код, соответствующий ВТОРОМУ Номеру КИПОВОЙ ГРУППЫ, ос
Далее процесс изменения высоты разборщика 8 аналогичен описанному выше с той лишь разницей, что на входы схем 91 и 92 сравнения поступают
сигналы, соответствующие действитель- 40 разборщик 8 постепенно опускается
ной и расчетной высоте разборщика 8 над второй киповой группой Н44, информация о которой находится в регистре 87о После сработки первого слоя
все ниже и в момент совпадения код соответствующих текущей высоте раз борщика 8 и высоте, определенной блоком 102 вычисления опорной высо
второй, а затем и первой киповых групп.5 схема 95 сравнения выдает сигнал,
по поступлению очередного управляющего сигнала на выходе 138 блока 114 определения координат кип в момент совпадения кодов, поступающих с реверсивного счетчика 117 совпадения кодов и регистра 121 на входы схемы 127 сравнения, тележка, продолжая движение влево, подъезжает к управ-1 ляющему элементу датчика 11 крайнего левого положения, сигнал с датчика поступает на вход 77 логического блока 35, на вход 75 блока 52 временных задержек, с выхода 58 блока задержек - на вход 59 логического блока 35, че
рез формирователь 78 на счетный вход, счетчика 84, на один из установочных входов счетчика 79, а также на вход 142 блока 114 определения координат киповых групп, обнуляя счетчик 117 и переводя его из режима обратного счета в режим прямого счета„
В результате этого тележка посредством логического блока 35, триггера 34 и блока 27 останавливается на время, определяемое блоком 52 задержек (3-4 с), далее посредством логического блока 35, триггера 33 и того же блока 27 реверсирует, т.е. начинает . движение вправо от управляющего элемента 14 датчика 11„
На выходе счетчика 84 появляется сигнал, соответствующий второму шагу
счетчика 79 появляется сигнал, соответствующий первому номеру киповой группы, ключ 105 оказывается закрытым выходным сигналом триггера 34, а ключ 106 - открытым выходным сигналом триггера 33о С блока 85 вычисления текущей высоты киповых групп в регистры 86-88 поступают коды вычисленных высот соответственно На«, Неаи еу Прощика в соответствии с рассчитанной над каждой изкиповых групп подобен описанному выше и отличается лишь тем, что осуществляется в данном случае по сигналам, поступающим с выхода 137 блока 114 определения координат киповых групп через элемент ИЛИ 135„
Так, срабатывая кипы шаг за шагом,
все ниже и в момент совпадения кодов, соответствующих текущей высоте разборщика 8 и высоте, определенной блоком 102 вычисления опорной высоты,
0
5
поступающий на управляющие входы ключей 105 и 106, управляющий вход счетчика 107 и ключа 1080 В результате этого режим кипного питателя становится неавтоматическим, т0е, начинается прямолинейная горизонтальная сработка киповых групп с опусканием разборщика в крайнем положении тележки на величину базового шага hg0 Это осуществляется следующим образом. Выходным сигналом схемы 95 сравнения ключи 105 и 106 закрываются и выходные сигналы блока 114 определения ко- кординат киповых групп перестают вли-
ять на работу кипного питателя0 По сигналам датчиков крайнего правого 10 или крайнего левого 11 положения тележки 6, поступающим через элемент 76 ИЛИ и открытый ключ 108 на вход 109 логического блока 35 через триггер 32 и блок 26, подается сигнал на разборщик, последний опускается на величину базового шага Сигнал на остановку разборщика при достижении заданной величины опускания вырабатывается схемой 147 сравнения, затем по- ступает на логический блок 35, триггер 32 и блок 26„ Схема 147 сравнения выдает управляющий сигнал на остановку разборщика в момент совпадения кодов, поступающих на ее входы от блока 101 задания кодов и счетчика 107, связанного с датчиком 145 пере- ещения разборщикао
Для предотвращения резких рывков тележки при ее реверсе в крайних положениях в блоке 52 временных задержек имеются элементы 54 и 55 задержки, обеспечивающие временной интервал (3-4 с) между моментом выключения электродвигателя привода тележки 24 и его реверсом
Нажатием кнопки 64 Стоп на пуль- те 62 управления передается сигнал на элемент ИЛИ 68, затем на управляющие входы триггеров 31-34 через логичес- (сий блок 35, а на управляющий вход триггера 30 - непосредственно., Блоки J25-27, получив сигнал от триггеров &0-34, могут остановить электродвигатели 21-24 в любом режиме работы кипного питателя
Остановка электродвигателей приво- Да рыхлящих барабанов 21 и 22, привод разборщика 23 и привода тележки 24 происходит и при полной сработке китовых групп, тое, в кр айнем нижнем Положении разборщика на высоте Нянн Л 0 по сигналу «датчика 20 крайнего нижнего положения разборщикао
50
Формула изобретения 1 о Устройство для управления кип- иым питателем с верхним отбрром волокна, содержащее датчик текущей высоты киповых групп, датчики крайних положений разборщика и его вертикального перемещения, датчики крайних ложений тележки и задатчик производи- гельности кипного питателя, подключенные к соответственно с первого по Седьмой входам программируемого управ0
5
30
о
0
5
35
45
0
55
ляющего блока, выходы которого связаны соответственно с блоками управления приводами горизонтального перемещения тележки, вертикального перемещения разборщика и рыхлящих барабанов, а выходы задатчика производительности подключены к первому и второму входам блока вычисления шага сработки разборщика, третьим входом связанного с выходом блока вычисления разности высот киповых групп, первым выходом - с первым входом блока вычисления текущей высоты киповых групп, а вторым выходом через блок вычисления опорной высоты киповых групп - с восьмым входом программируемого управляющего блока, информационные входы и четвертый выход которого соединены соответственно с выходами и вторым входом блока вычисления текущей высоты киповых групп, причем информационные выходы программируемого управляющего блока через блок определения минимальной высоты киповой группы подключены к входу блока вычисления разности высоты киповых групп, о т л и -) чающее ся- тем, что, с целью расширения технологических возможностей, оно снабжено элементами ИЛИ, датчиками перемещения тележки и определения промежутков между ки- повыми группами, блоками контроля промежутков, определения количества киповых групп и их координат, при этом датчик определения промежутков между киповыми группами подключен к первым входам элементов ИЛИ, блоков определения количества и координат киповых групп, датчик перемещения тележки связан с вторым входом блока определения координат киповых групп и со счетным входом блока контроля промежутков, установочный вход которого соединен с выходом первого элемента ИЛИ, причем третий и четвертый входы блока определения координат подключены к датчикам крайних положений тележки, первый выход - к второму входу второго элемента ИЛИ, его второй выход и выход второго элемента ИЛИ соответственно - к девятому и десятому входам программируемого управляющего блока , а установочный вход блока определения количества киповых групп и второй вход первого элемента ИЛИ связаны соответственно с пятым и шестым выходами программируемого уп- равляющего блока ,
2„ Устройство по п,1,о тли-но подключенным к выходу блока контчающееся тем, что оно снабже- роля промежутков блоком индикации.
№-
1В
6
17
ъ « п
6 Фиг.г
9
Фиг.3а
Фиг. 35
Уст.,,1
75
54
53
80
55
60
II
Фиг. 5
Исходное положение
Фиге
влево
йярабо
| Устройство для управления кипным питателем с верхним отбором волокна | 1986 |
|
SU1416540A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
