9д
ел
4ib
Изобретение относится к текстильной промышленности.
Цель изобретения - повышение точности управления путем улучшения процесса смешивания волокон в выходном родукте.
На фиг. 1 изображен кипный питатель, вид сверху; на фиг, 2 - то же, вид сбоку; на фиг. 3 - структурная схема устройства; на фиг. 4 - схема логического сумматора:, на фиг. 5 - схема блока временных задержек; на фиг. 6 - циклограмма работы кипного питателя в режимах измерения и автоматической сработки киповых групп, i Вдоль киповый групп 1, 2 и 3, состоящих из хлопковых кип 4, уложены рельсы 5, по которым.передвигается Тележка 6 кипного питателя, несущая на себе колонну 7 с разборщиком 8. В разборщике 8 находятся два рыхлящих барабана 9, при вращении которых производится отбор волокна от кип 4. На
0
0
КИМ лучом излучающего элемента 19, в качестве которого может использоваться электрическая лампочка с линзовой фокусирующей системой или светодиод. Датчики 18 срабатывают в момент перекрытия светового пучка, падающего на них от излучающих элементов 19, одной из киповых групп 1, 2 или 3 при движении разборщика 8 сверху вниз.
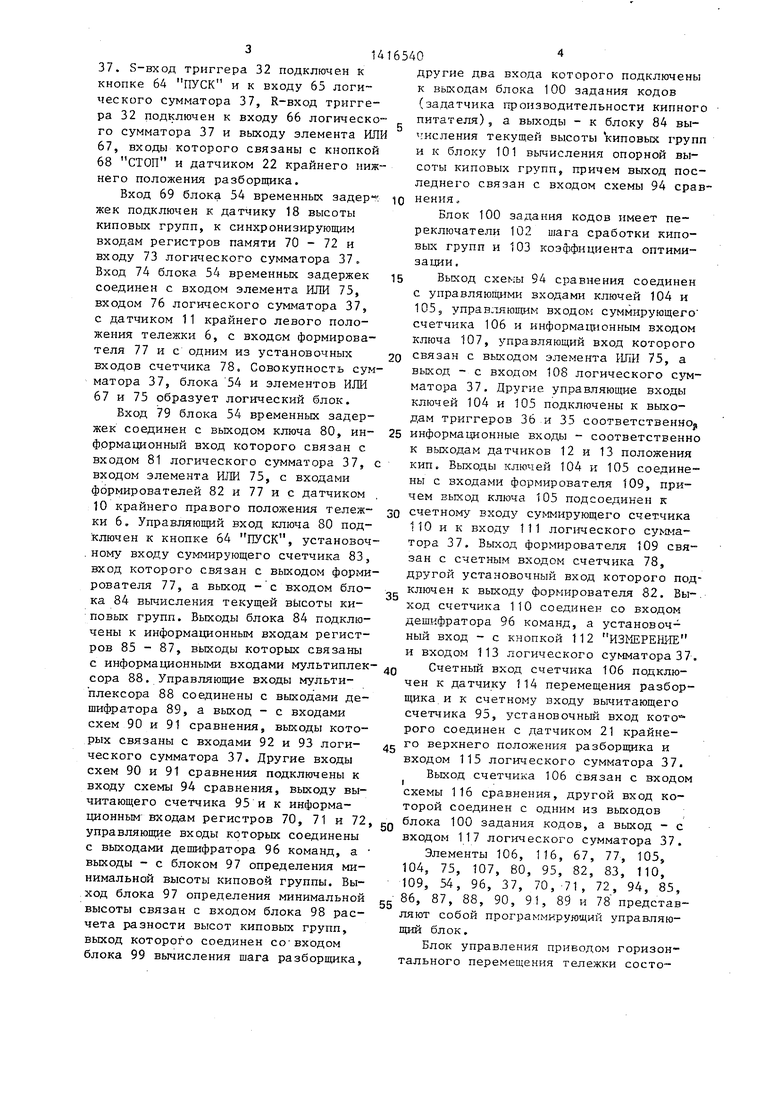
Устройство для управления кипным питателем с верхним отбором волокна содержит асинхронные электродвигатели 23 и 24 привода рыхлящих барабанов, асинхронный электродвигатель 25 привода разборщика, асинхронный электродвигатель 26 привода тележки. Электродвигатели 23 - 26 через соответствующие блоки 27 - 29 пускозащитной аппаратуры подключены к питающей сети 30 переменного тока. Блоки 27 - 29 пускозащитной аппаратуры могут быть выполнены по известным схемам на основе магнитных пускателей или тирис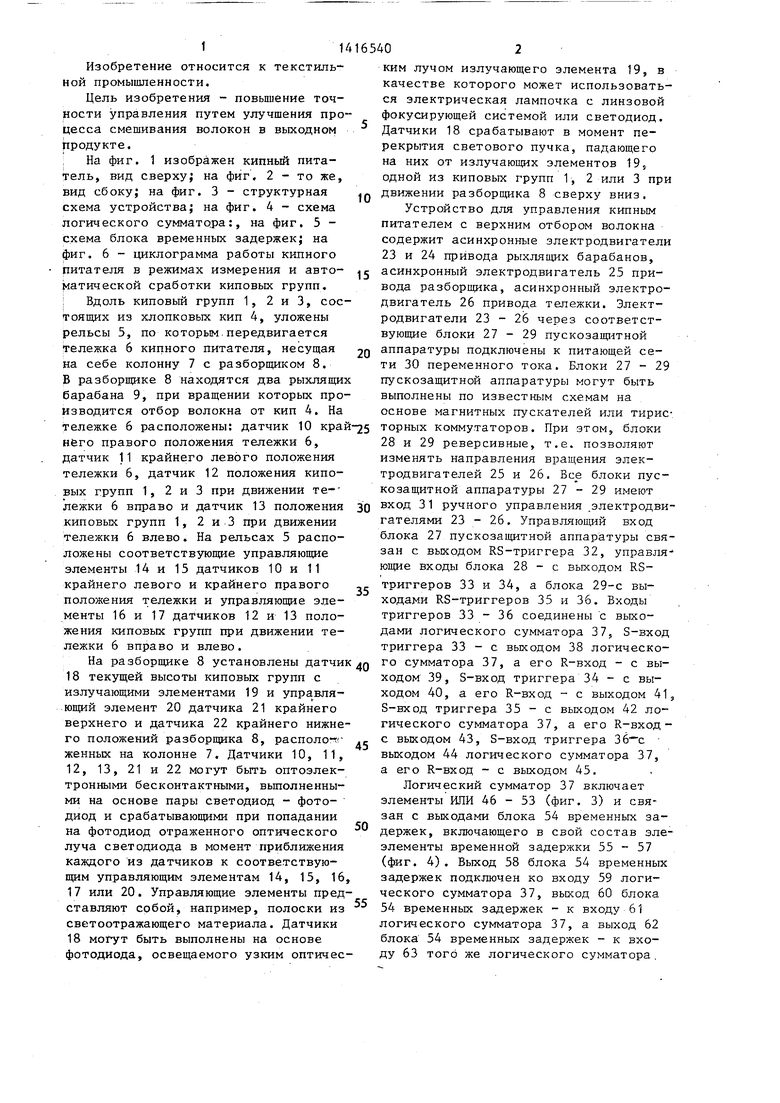

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления кипным питателем с верхним отбором волокна | 1988 |
|
SU1553574A1 |
| Устройство управления кипным питателем с верхним отбором волокна | 1986 |
|
SU1392153A1 |
| Регулятор производительности кипного разрыхлителя с верхним отбором волокна | 1986 |
|
SU1341262A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПЕРЕРАБОТКИ ВОЛОКНИСТОГО МАТЕРИАЛА | 1990 |
|
RU2016925C1 |
| Устройство для стабилизации производительности батареи кипоразборщиков | 1985 |
|
SU1276693A1 |
| Устройство для разборки кип волокнистого материала | 1986 |
|
SU1514843A1 |
| Устройство для управления пневмомеханической прядильной машиной | 1985 |
|
SU1294885A1 |
| Устройство для стабилизации производительности кипоразборщика | 1982 |
|
SU1039994A1 |
| Цифроаналоговый преобразователь с автоматической коррекцией нелинейности | 1988 |
|
SU1594699A1 |
| Устройство для вычисления динамических характеристик систем | 1983 |
|
SU1221639A1 |

Изобретение относится к текстильной промьшшенности. Цель изобретения -. повышение точности управления путем улучшения процесса смешивания волокон в выходном продукте. Предложенное устройство осуществляет вычисление шага сработки разборщика для каждой из киповых групп в соответствии с выражением h; hg( 1+ДН;/KHg), где h,- - шаг сработки разбор1цика i-ой киповой группы; Hg - базовая (минимальная) высота киповой группы; ДН, - превьшзе- .ние исходной высоты i-ой киповой группы относительного б базовый (первоначальный) шаг сработки, определяемый производительностью кип- ного питания; К - коэффициент оптимизации, зависящий от типа волокна в киповых группах. 6 ил. с б (Л с
тележке 6 расположены: датчик 10 край-25 торных коммутаторов. При этом, блоки
него правого положения тележки 6, датчик 11 крайнего левого положения тележки 6, датчик 12 положения киповых групп 1, 2 и 3 при движении те-- лежки 6 вправо и датчик 13 положения киповых групп 1, 2 и 3 при движении тележки 6 влево. На рельсах 5 расположены соответствующие управляющие элементы 14 и 15 датчиков 10 и 11 крайнего левого и крайнего правого положения тележки и управляющие элементы 16 и 17 датчиков 12 и 13 положения киповых групп при движении тележки 6 вправо и влево.
30
35
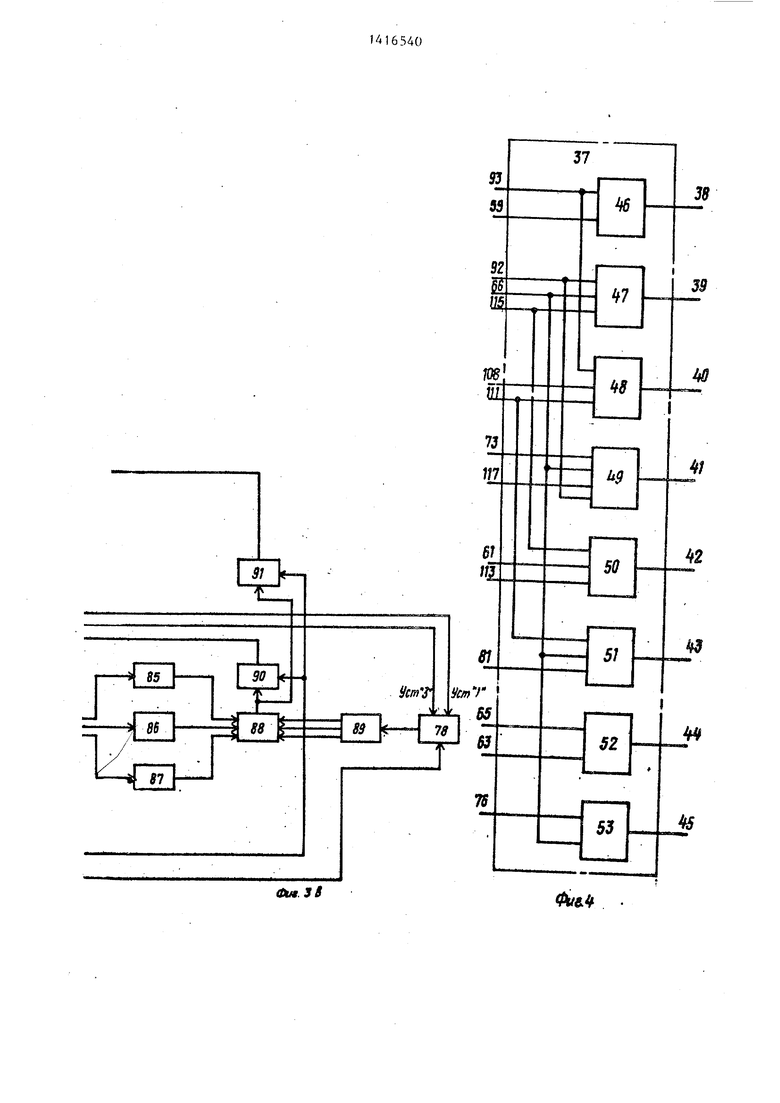
28 и 29 реверсивные, т.е. позволяют изменять направления вращения электродвигателей 25 и 26, Все блоки пускозащитной аппаратуры 27 - 29 имеют вход 31 ручного управления .электродви гателями 23 - 26. Управляющий вход блока 27 пускозащитной аппаратуры свя зан с выходом RS-триггера 32, управля ющие входы блока 28 - с выходом RSтриггеров 33 и 34, а блока 29-с выходами RS-триггеров 35 и 36. Входы триггеров 33-36 соединены с выходами логического сумматора 37, S-вход триггера 33 - с выходом 38 логическоНа разборщике 8 установлены датчик д го сумматора 37, а его R-вход - с вы45
18 текущей высоты киповых групп с излучающими элементами 19 и ющий элемент 20 датчика 21 крайнего верхнего и датчика 22 крайнего нижнего положений разборщика 8, располо-; женных на колонне 7. Датчики 10, 11, 12, 13, 21 и 22 могут быть оптоэлек- тронными бесконтактными, вьшолненны- ми на основе пары светодиод - фотодиод и срабатывающими при попадании на фотодиод отраженного оптического луча светодиода в момент приближения каждого из датчиков к соответствующим управляющим элементам 14, 15, 16,
17или 20. Управляющие элементы представляют собой, например, полоски из светоотражающего материала. Датчики
18могут быть выполнены на основе фотодиода, освещаемого узким оптичес50
ходом 39, S-вход триггера 34 - с выходом 40, а его R-вход - с выходом 41, S-вход триггера 35 - с выходом 42 логического сумматора 37, а его R-вход- с выходом 43, S-вход триггера - выходом 44 логического сумматора 37, а его R-вход - с выходом 45,
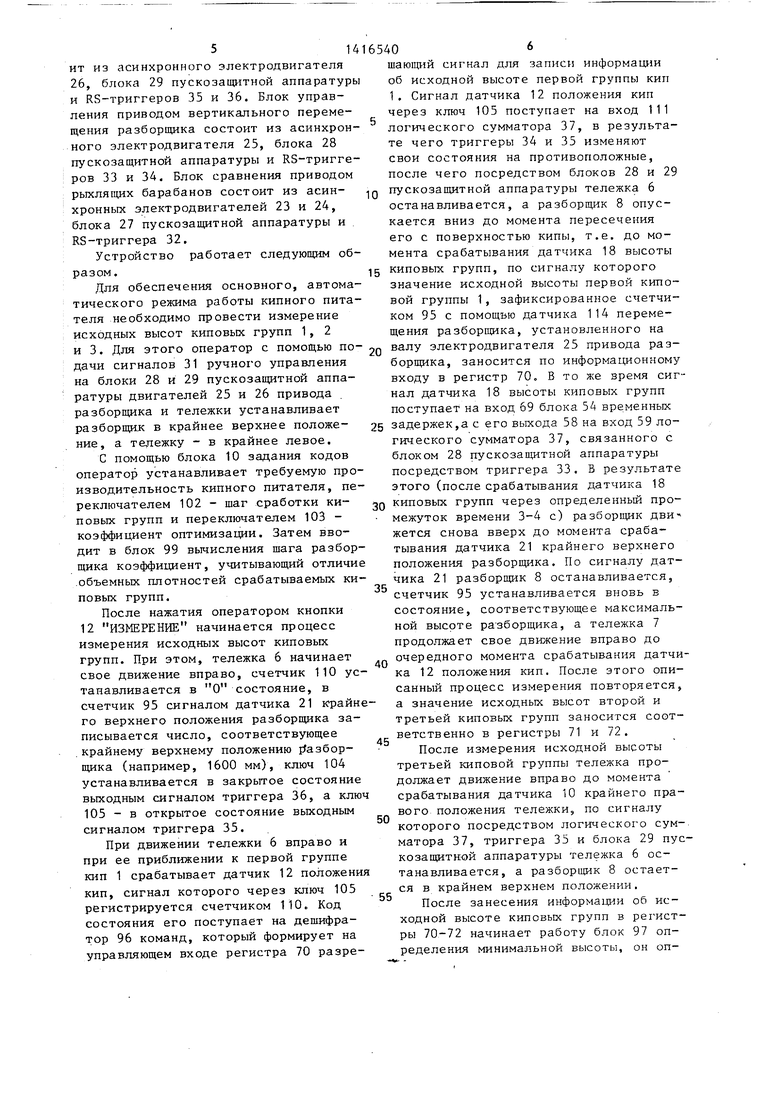
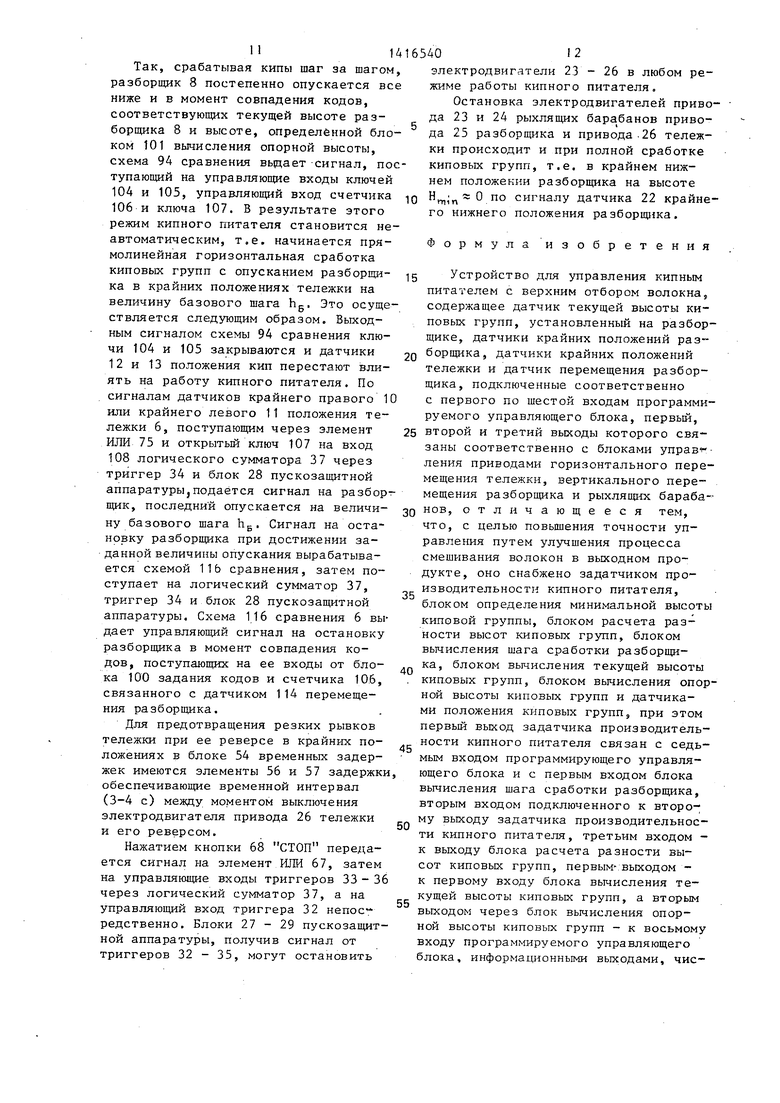
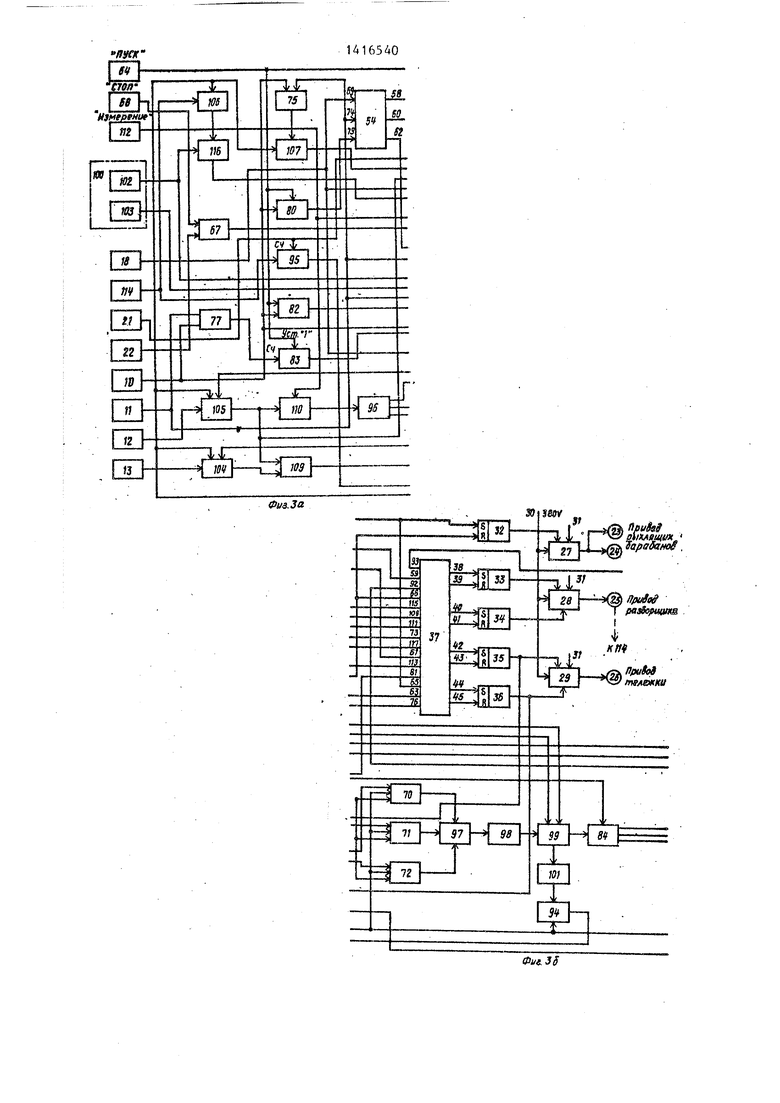
Логический сумматор 37 включает элементы ИЛИ 46 - 53 (фиг. 3) и связан с выходами блока 54 временных задержек, включающего в свой состав эле- элементы временной задержки 55-57 (фиг. 4). Выход 58 блока 54 временных задержек подкхпочен ко входу 59 логического сумматора 37, выход 60 блока 54 временных задержек - к входу 61 логического сумматора 37, а выход 62 блока 54 временных задержек - к входу 63 того же логического сумматора.
0
5
28 и 29 реверсивные, т.е. позволяют изменять направления вращения электродвигателей 25 и 26, Все блоки пускозащитной аппаратуры 27 - 29 имеют вход 31 ручного управления .электродвигателями 23 - 26. Управляющий вход блока 27 пускозащитной аппаратуры связан с выходом RS-триггера 32, управля- ющие входы блока 28 - с выходом RSтриггеров 33 и 34, а блока 29-с выходами RS-триггеров 35 и 36. Входы триггеров 33-36 соединены с выходами логического сумматора 37, S-вход триггера 33 - с выходом 38 логическод го сумматора 37, а его R-вход - с вы5
0
ходом 39, S-вход триггера 34 - с выходом 40, а его R-вход - с выходом 41, S-вход триггера 35 - с выходом 42 логического сумматора 37, а его R-вход- с выходом 43, S-вход триггера - выходом 44 логического сумматора 37, а его R-вход - с выходом 45,
Логический сумматор 37 включает элементы ИЛИ 46 - 53 (фиг. 3) и связан с выходами блока 54 временных задержек, включающего в свой состав эле- элементы временной задержки 55-57 (фиг. 4). Выход 58 блока 54 временных задержек подкхпочен ко входу 59 логического сумматора 37, выход 60 блока 54 временных задержек - к входу 61 логического сумматора 37, а выход 62 блока 54 временных задержек - к входу 63 того же логического сумматора.
314
Вход 69 блока 54 временных задер г жек подключен к датчику 18 высоты киповых групп, к синхронизирующим входам регистров памяти 70 - 72 и входу 73 логического сумматора 37. Вход 74 блока 54 временных задержек соединен с входом элемента ИЛИ 75, входом 76 логического сумматора 37, с датчиком 11 крайнего левого положения тележки 6, с входом формирователя 77 и с одним из установочных входов счетчика 78, Совокупность сумматора 37, блока 54 и элементов ИЛИ 67 и 75 образует логический блок.
Вход 79 блока 54 временных задержек соединен с выходом ключа 80, информационный вход которого связан с входом 81 логического сумматора 37, с входом элемента ИЛИ 75, с входами формирователей 82 и 77 и с датчиком 10 крайнего правого положения тележки 6, Управляющий вход ютюча 80 подключен к кнопке 64 ПУСК, установоч- , ному входу суммирующего счетчика 83, вход которого связан с выходом формирователя 77, а выход - с входом блока 84 вычисления текущей высоты киповых групп. Выходы блока 84 подключены к информационным входам регистров 85 - 87, выходы которых связаны с информационными входами мультиплексора 88. Управляющие входы мультиплексора 88 соединены с выходами дешифратора 89, а выход - с входами схем 90 и 91 сравнения, выходы которых связаны с входами 92 к 93 логического сумматора 37. Другие входы схем 90 и 91 сравнения подключены к входу схемы 94 сравнения, выходу вычитающего счетчика 95 и к информационным входам регистров 70, 71 и 72, управляющие входы которых соединены с выходами дешифратора 96 команд, а выходы - с блоком 97 определения минимальной высоты киповой группы. Выход блока 97 определения минимальной высоты связан с входом блока 98 расчета разности высот киповых групп, выход которого соединен со входом блока 99 вычисления шага разборщика.
540
другие два входа которого подключены к выходам блока 100 задания кодов (задатчика производительности кипного питателя), а выходы - к блоку 84 вычисления текущей высоты киповых групп и к блоку 101 вычисления опорной высоты киповых групп, причем выход последнего связан с входом схемы 94 срав0 нения.
Блок 100 задания кодов имеет переключатели 102 шага сработки киповых групп и 103 коэффициента оптимизации.
5 Выход схемы 94 сравнения соединен с управляющими входами ключей 104 и 105, управляющим входом суммирующего счетчика 106 и информационньм входом ключа 107, управляющий вход которого
0 связан с выходом элемента ИПИ 75, а выход - с входом 108 логического сумматора 37. Другие управляющие входы ключей 104 и 105 подключены к выходам триггеров 36 и 35 соответственно,
5 информационные входы - соответственно к выходам датчиков 12 и 13 положения кип. Выходы ключей 104 и 105 соединены с входами формирователя 109, причем выход ключа 105 подсоединен к
0 счетному входу суммирующего счетчика 1 10 и к входу 111 логического сумь$а- тора 37. Выход формирователя 109 связан с счетным входом счетчика 78, другой установочный вход которого подключен к выходу формирователя 82. Вы-, ход счетчика 110 соединен со входом дешифратора 96 команд, а установочный вход - с кнопкой 112 ИЗМЕРЕНИЕ
и входом 113 логического сумматора 37, Q Счетный вход счетчика 106 подключен к датчику 114 перемещения разборщика и к счетному входу вычитающего счетчика 95, установочный вход рого соединен с датчиком 21 крайне- g го верхнего положения разборщика и входом 115 логического сумматора 37. Выход счетчика 106 связан с входом
схемы 116 сравнения, другой вход которой соединен с одним из выходов g блока 100 задания кодов, а выход - с входом 117 логического сумматора 37.
Элементы 106, 116, 67, 77, 105, 104, 75, 107, ВО, 95, 82, 83, 110, 109, 54, 96, 37, 70, 71, 72, 94, 85, g 86, 87, 88, 90, 91, 89 и 78 представляют собой программирующий упраагтяю- щий блок.
Блок управления приводом горизонтального перемещения тележки состо5
5 U165406
ит из асинхронного электродвигателяшаюишй сигнал для записи информации 26, блока 29 пускозащитной аппаратурыоб исходной высоте первой группы кип и RS-триггеров 35 и 36. Блок управ-1. Сигнал датчика 12 положения кип ления приводом вертикального переме-через ключ 105 поступает на вход 111 щения разборпщка состоит из асинхрон- логического сумматора 37, в результа- ного электродвигателя 25, блока 28те чего триггеры 34 и 35 изменяют пускозащитной аппаратуры и RS-тригге-свои состояния на противоположные, ров 33 и 34. Блок сравнения приводомпосле чего посредством блоков 28 и 29 рыхляпщх барабанов состоит из асин- Q пускозащитной аппаратуры тележка 6 хронных электродвигателей 23 и 24,останавливается, а разборщик 8 опус- блока 27 пускозащитной аппаратуры икается вниз до момента пересечения RS-триггера 32.его с поверхностью кипы, т.е. до моУстройство работает следуюпщм об-мента срабатывания датчика 18 высоты
разом.15 киповых групп, по сигналу которого
Для обеспечения основного, автома-значение исходной высоты первой кипо- тического режима работы кипного пита-вой группы 1, зафиксированное счетчи- теля необходимо провести измерениеком 95 с помощью датчика 114 переме- исходных высот киповых групп 1, 2щения разборщика, установленного на и 3. Для этого оператор с помощью по-JQ валу электродвигателя 25 привода раздачи сигналов 31 ручного управленияборщика, заносится по информационному на блоки 28 и 29 пускозащитной аппа-входу в регистр 70, В то же время сиг- ратуры двигателей 25 и 26 привода .нал датчика 18 высоты киповых групп разборщика и тележки устанавливаетпоступает на вход 69 блока 54 временных разборщик в крайнее верхнее положе-25 задержек,а с его выхода 58 на вход 59 ло- ние, а тележку - в крайнее левое.гического сумматора 37, связанного с
С помощью блока 10 задания кодовблоком 28 пускозащитной аппаратуры
оператор устанавливает требуемую про-посредством триггера 33. В результате
изводительность кипного питателя, пе-этого (после срабатывания датчика 18
реключателем 102 - шаг сработки киповых групп через определенный проповых групп и переключателем 103 -. межуток времени 3-4 с) разборщик дви
коэффициент оптимизации. Затем вво-жется снова вверх до момента срабадит в блок 99 вычисления шага разбор-тывания датчика 21 крайнего верхнего
щика коэффициент, учитывающий отличиеположения разборщика. По сигналу дат.объемных плотностей срабатываемых ки-чика 21 разборщик 8 останавливается,
повых групп.счетчик 95 устанавливается вновь в
После нажатия оператором кнопкисостояние, соответствующее максималь12 ИЗМЕРЕНИЕ начинается процессной высоте ра зборщика, а тележка 7
измерения исходных высот киповыхпродолжает свое движение вправо до
групп. При этом, тележка 6 начинаеточередного момента срабатывания датчисвое движение вправо, счетчик 110 ус-ка 12 положения кип. После этого опитапавливается в О состояние, всанный процесс измерения повторяется,
счетчик 95 сигналом датчика 21 крайне-а значение исходных высот второй и
го верхнего положения разборщика за-третьей киповых групп заносится соотписывается число, соответствующееветственно в регистры 71 и 72.
.крайнему верхнему положению рГазбор- После измерения исходной высоты
щика (например, 1600 мм), ключ 104третьей киповой группы тележка проустанавливается в закрытое состояниедолжает движение вправо до момента
выходным сигналом триггера 36, а ключсрабатывания датчика 10 крайнего пра105 - в открытое состояние выходнымвого положения тележки, по сигналу
сигналом триггера 35.которого посредством логического сумПри движении тележки 6 вправо иматора 37, триггера 35 и блока 29 пуспри ее приближении к первой группекозащитиой аппаратуры тележка 6 осrain 1 срабатывает датчик 12 положениятанавливается, а разборщик 8 остаеткип, сигнал которого через ключ 105ся в крайнем верхнем положении.
регистрируется счетчиком 110. КодПосле занесения информации об иссостояния его поступает на дешифра-ходной высоте киповых групп в регисттор 96 команд, который формирует нары 70-72 начинает работу блок 97 опуправляющем входе регистра 70 разре-ределения минимальной высоты, он оп u
ределяет киповую группу с наименьшей так называемой базовой высотой -Hg. Далее информация об исходных высотах киповых групп 1, 2 и 3 соответственно H,, Hj и Hj и определенное значение Hg поступает в блок 98 расчета разности высот кип, который вычисляет превышение высот киповых групп относительно базовой высоты по формуле
ДН; Н,-- НБ,
где лН; - превышение исходной высоты i-ой киповой группы относительно базовой высоты Н - высота i-ой киповой группы Блок 99 вычисления шага разборщика осуществляет вычисление размера шагов сработки для каяодой из киповых групп по формуле
.. ЛН; .
где hj - щаг сработки разборщиком
i-ой киповой группы (причем для одной из киповых групп, определенной блоком 97 определения минимальной высоты в качестве базовой,,Ь; hg, так как соответствующее значение йН; 0) J h - базовьм шаг сработки (заb
дается оператором вручную переключателем 102 в блоке 100 задания кодов и может быть равен, например 2, 4, 6 и 8 мм);
К - коэффициент оптимизации, с помощью которого определяют высоту, начиная с которой прекращается ступенчатое движение разборш 1ка и начинается прямолинейная горизонтальная сработка киповых групп (коэффициент оптимизации задается оператором вручную переключателем 103 в блоке задания кодов и может быть равен, например, 0,3, О,4,..,,О,9 или 1; коэффициент оптимизации вносится в блок 99 вычисления шага разборщика .
Из блока 99 вычисления шага разборщика 8 информация поступает в бло 84 вычисления высоты киповых групп и в блок 101 вычисления опорной высоты
165408
Опорная высота - это высота, с которой начинается прямолинейная горизонтальная сработка киповых групп.
В блоке 101 вычисления опорной высоты эта высота определяется по формуле
Но (1-К)Н
Б
10
где Нд - опорная высота; НБ - базовая высота;
К - коэффициент оптимизации. Блок 84 вычисления текущей высоты 15 киповых групп определяет высоту положения разборщика над каждой из срабатываемых групп кип 1, 2, 3 в зависимости от номера шага сработки по Формуле
20
Н; Н- - n-h; ,
где Н - высота разборщика над i-ой
киповой группой при п-ом 25шаге сработки;
Hj - исходная высота i-ой киповой группы;
п - номер шага сработки; h - шаг сработки для i-ой кипо- 30вой группы.
Результаты вычислений Н,, ; H.JJ,; поступающие соответственно в регистры 85, 86, 87, постоянно корректируются в процессе автоматической Tg обработки киповых групп по мере уве- личения номера шага сработки.
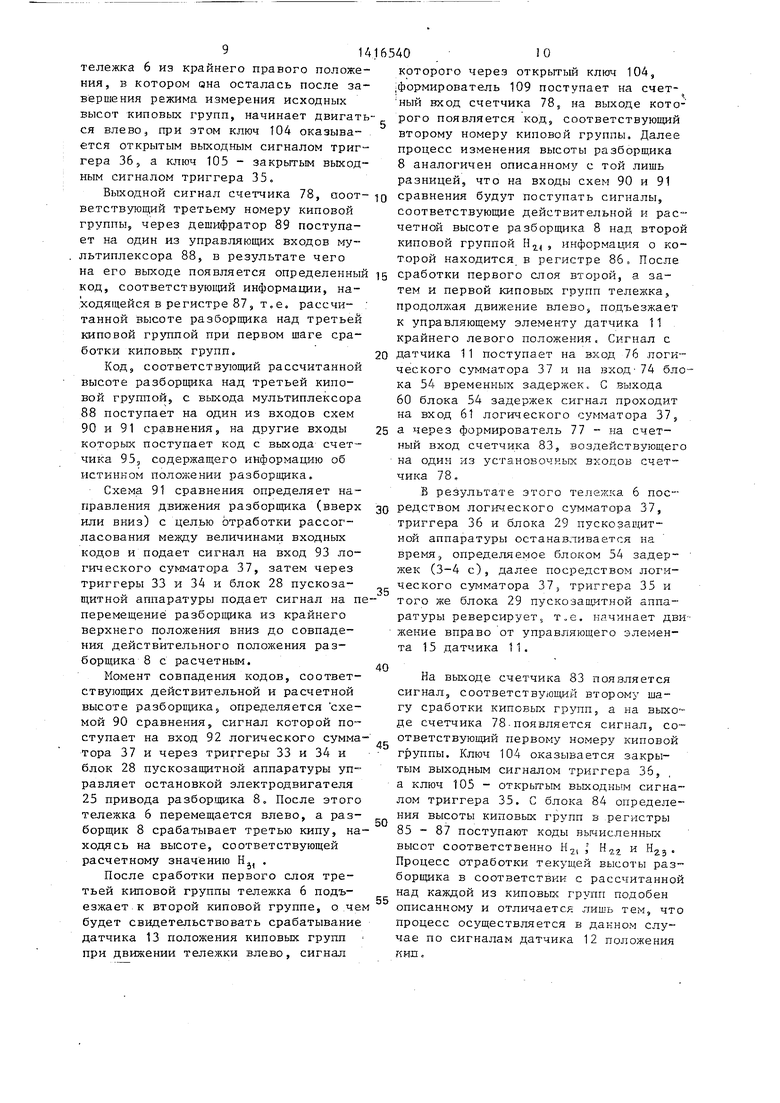
Работа кипного питателя в режимах измерения и автоматической сработки киповых групп поясняется циклограммой 40 (фиг. 6).
.После нажатия оператором кнопки 64 ПУСК начинается автоматический режим сработки киповых групп. При этом, через триггер 32 и блок 27 пускозащит- 45 ной аппаратуры включаются электродвигатели 23 и 24 привода рыхляп их барабанов, счетчик 83 устанавливается в состояние, соответствующее первому шагу сработки кип (п 1). По сигналу gQ с кнопки 64 ключ 80 переходит в открытое состояние, счетчик 78 через формирователь 82 переходит в состояние, соответствующее третьему номеру киповой группы (i 3). Сигнал с кнопки 64 ПУСК через вход 65 логического сумматора 37 и через элемент ИЛИ 52 логического сумматора 37 поступает на триггер 36 и блок 29 пускозащит- ной аппаратуры, по сигналу которого
55
9U
тележка 6 из крайнего правого положения, в котором она осталась после завершения режима измерения исходных высот киповых групп, начинает двигаться влево, при этом ключ 104 оказыва- ется открытым выходнь м сигналом триггера 36, а ключ 105 - закрытым выходным сигналом триггера 35,
Выходной сигнал счетчика 78, соответствующий третьему номеру киповой группы, через дешифратор 89 поступает на один из управляющих входов мультиплексора 88, в результате чего на его выходе появляется определенный код, соответствующий информации, находящейся в регистре 87, т.е. рассчи- танной высоте разборщика над третьей киповой группой при первом шаге сра- ботки киповых групп.
Код, соответствующий рассчитанной высоте разборщика над третьей киповой группой, с выхода мультиплексора 88 поступает на один из входов схем 90 и 91 сравнения, на другие входы которых поступает код с выхода счетчика 95, содержащего информацию об истинном положении разборщика.
Схема 91 сравнения определяет направления движения разборщика (вверх или вниз) с целью отработки рассогласования между величинами входных кодов и подает сигнал на вход 93 логического сумматора 37, затем через триггеры 33 и 34 и блок 28 пускоза- щитной аппаратуры подает сигнал на п перемещение разборщика из крайнего верхнего положения вниз до совпадения действительного положения разборщика 8 с расчетным.
Момент совпадения кодов, соответствующих действительной и расчетной высоте разборпщка, определяется схемой 90 сравнения, сигнал которой поступает на вход 92 логического сумматора 37 и через триггеры 33 и 34 и блок 28 пускозащитной аппаратуры управляет остановкой электродвигателя 25 привода разборщика 8„ После этого тележка 6 перемещается влево, а разборщик 8 срабатывает третью кипу, находясь на высоте, соответствующей расчетному значению Hj, ,
После сработки первого слоя третьей киповой группы тележка 6 подъезжает к второй киповой группе, о .че будет свидетельствовать срабатывание датчика 13 положения киповых групп при движении тележки влево, сигнал
654010
которого через открытый ключ 104, ;формирователь 109 поступает на счет- ный вход счетчика 78, на выходе кото рого появляется код, соответствующий второму номеру киповой группы. Далее процесс изменения высоты разборщика 8 аналогичен описанному с той лишь разницей, что на входы схем 90 и 91
O сравнения будут поступать сигналы, соответствующие действительной и расчетной высоте разборщика 8 над второй киповой группой Hj , информация о которой находится в регистре 86, После
5 сработки первого слоя второй, а затем и первой киповых групп тележка, продолжая движение влево, подъезжает к управляющему элементу датчика 11 крайнего левого положения. Сигнал с
0 датчика 11 поступает на вход 76 логического cyMbiaTopa 37 и на )зход-74 блока 54 временных задержек. С выхода 60 блока 54 задержек сигнал проходит на вход 61 логического сумматора 37,
5 а через формирователь 77 - на счетный вход счетчика 83, воздействующего на один из установочных входов счетчика 78,
В результате этого тележка 6 пос0 редством логического сумматора 37, триггера 36 и блока 29 пускозаьцит- ной аппаратуры останавливается на время, определяемое блоком 54 задержек (3-4 с), далее посредством логического сумматора 37, триггера 35 и того же блока 29 пускозащитной аппаратуры реверсирует, т.е. начинает движение вправо от управляющего элемента 13 датчика t1.
0
На выходе счетчика 83 появляется
сигнал, соответствующий второму шагу сработки киповых групп, а на выходе счетчика 78.появляется сигнал, соответствующий первому номеру киповой группы. Ключ 104 оказывается закрытым выходным сигналом триггера 36, а ключ 105 - открытьм выходным сигналом триггера 35, С блока 84 определения высоты киповых групп в регистры 85 - 87 поступают коды вычисленных высот соответственно Н.( , Н и Процесс отработки текущей высоты разборщика в соответствии с рассчитанной над каждой из киповых групп подобен описанному и отличается лишь тем, что процесс осуществляется в данном случае по сигналам датчика 12 положения
7 ЯП.
5
111
Так, срабатывая кипы шаг за шагом разборщик 8 постепенно опускается вс ниже и в момент совпадения кодов, соответствующих текущей высоте разборщика 8 и высоте, определённой блоком 101 вычисления опорной высоты, схема 94 сравнения вьдает сигнал, потупающий на управляющие входы ключей 104 и 105, управляющий вход счетчика 106 и ключа 107. В результате этого режим кипного питателя становится неавтоматическим, т.е. начинается прямолинейная горизонтальная сработка киповых групп с опусканием разборщика в крайних положениях тележки на величину базового шага hg. Это осуществляется следующим образом. Выходным сигналом схемы 94 сравнения ключи 104 и 105 закрываются и датчики 12 и 13 положения кип перестают влиять на работу кипного питателя. По сигналам датчиков крайнего правого 1 или крайнего левого 11 положения тележки 6, поступающим через элемент ИЛИ 75 и открытый ключ 107 на вход 108 логического сумматора 37 через триггер 34 и блок 28 пускозащитной аппаратурыJподаётся сигнал на разборщик, последний опускается на величину базового шага hg. Сигнал на остановку разборщика при достижении заданной величины опускания вырабатывается схемой lib сравнения, затем поступает на логический сумматор 37, триггер 34 и блок 28 пускозащитной аппаратуры. Схема 116 сравнения 6 выдает управляющий сигнал на остановку разборщика в момент совпадения кодов, поступающих на ее входы от блока 100 задания кодов и счетчика 106, связанного с датчиком 114 перемещения разборщика.
Для предотвращения резких рывков тележки при ее реверсе в крайних положениях в блоке 54 временных задержек имеются элементы 56 и 57 задержки обеспечивающие временной интервал (3-4 с) между моментом выключения электродвигателя привода 26 тележки и его реверсом.
Нажатием кнопки 68 СТОП передается сигнал на элемент ИЛИ 67, затем на. управляющие входы триггеров 33 - 36 через логический сумматор 37, а на управляющий вход триггера 32 непос - редственно. Блоки 27 - 29 пускозащитной аппаратуры, получив сигнал от триггеров 32 - 35, могут остановить
1654012
электродвигатели 23 - 26 в любом режиме работы кипного питателя.
Остановка электродвигателей привода 23 и 24 рыхлящих бара банов привода 25 разборщика и привода.26 тележки происходит и при полной сработке киповых групп, т.е. в крайнем нижнем положении разборщика на высоте
10
ПО сигналу датчика 22 крайнего нижнего положения разборщика.
5
0
5
0
5
0
5
0
5
Формула изобретения
Устройство для управления кипным питателем с верхним отбором волокна, содержащее датчик текущей высоты киповых групп, установленный на разборщике, датчики крайних положений раз борщика, датчики крайних положений тележки и датчик перемещения разборщика, подключенные соответственно с первого по шестой входам программируемого управляющего блока, первый, второй и третий выходы которого связаны соответственно с блоками управч-- ления приводами горизонтального перемещения тележки, вертикального пере- , мещения разборищка и рыхлящих барабанов, отличающееся тем, что, с делью повышения точности управления путем улучшения процесса смешивания волокон в выходном продукте, оно снабжено задатчиком производительности кипного питателя, блоком определения минимальной высоты киповой группы, блоком расчета разности высот киповых групп, блоком вычисления шага сработки разборщика, блоком вычисления текущей высоты кип.овых групп, блоком вычисления опорной высоты киповых групп и датчиками положения киповых групп, при этом первый выход задатчика производительности кипного питателя связан с седьмым входом программирующего управляющего блока и с первым входом блока вычисления шага сработки разборщика, вторым входом подключенного к второ-; му выходу задатчика производительности кипного питателя, третьим входом - к выходу блока расчета разности высот киповых групп, первым .выходом - к первому входу блока вычисления текущей высоты киповых групп, а вторым выходом через блок вычисления опорной высоты киповых групп - к восьмому входу программируемого управляющего блока, информационными выходами, чис1314
ло которых равно числу киповых групп, Связанного с соответствующими выходами блока вычисления текущей высоты киповых групп, второй вход которого подключен к четвертому выходу программирующего управляющего блока, причем информационные выходы программируемого управляющего блока, число ко15Фиг,1
165401А
торых равно числу киповых групп, рез блок определения минимальной высоты киповой группы подключены к входу блока расчета разности высоты киповых групп, а датчики положения киповых групп связаны соответственно с девятым и десятым входами программируемого управляющего блока.
Фиг, 2
Фив.ЗВ
5Sl
38
9Z
Е т
7
39
щ1
т
8
73 117
9
4/
61 S
50
42
SI
5/
УстГ
52
4
55
Фи&
Физ.3с1
npuki
niMmux
iaflffS
H W f 28 nptfiag -Ж- Txwiftjww
Фие.3§
| Патент США № 4507826, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
