фие. 2
10
15
Изобретение относится к подъемно- ранспортной технике, в частности к захватным устройствам для грузов круглого сечения,
Цель изобретения - повышение наежности захвата вертикально распооженного груза,
На фиг. 1 показано захватное устройство для грузов круглого сечения,; общий вид; на фиг, 2 - вид А на фиг. 1; на иг./ 3 - разрез Б-Б на фиг 1; на иг, 4 - разрез В-В на фиг. 2; на фиг. 5 - разрез Г-Г на фиг, 1, Захватное устройство для грузов руглого сечения содержит два дугообразых расположенных горизонтально гибких захватных органа 1 и 2, выполненных из пружинного материала, взаимосвязанных посредством гибких тяг 3 с подвеской 20 4. На концах каждого из захватов жестко закреплены гайки 5 и 6, Каждая пара гаек 5 и 6, расположенных на смежных концах захватных органов 1 и 2 с одной стороны, взаимосвязана между 5 собой посредством горизонтальной оси 7 с наружной винтовой нарезкой, образуя замкнутый кольцевой контур. Причем нарезка смежных винтовых соединений гайка-ось, образованных на каждом -JQ из концов оси 7, направлена навстречу друг другу, т.е. горизонтальная ось 7 на обоих концах и смежные гайки 5 и 6, взаимосвязанные с ними, . имеют разнонаправленную резьбу 8.
На осях 7 закреплены двуплечие рычаги 9, нижние плечи 10 которых взаимосвязаны с гибкими тягами 3 и
35
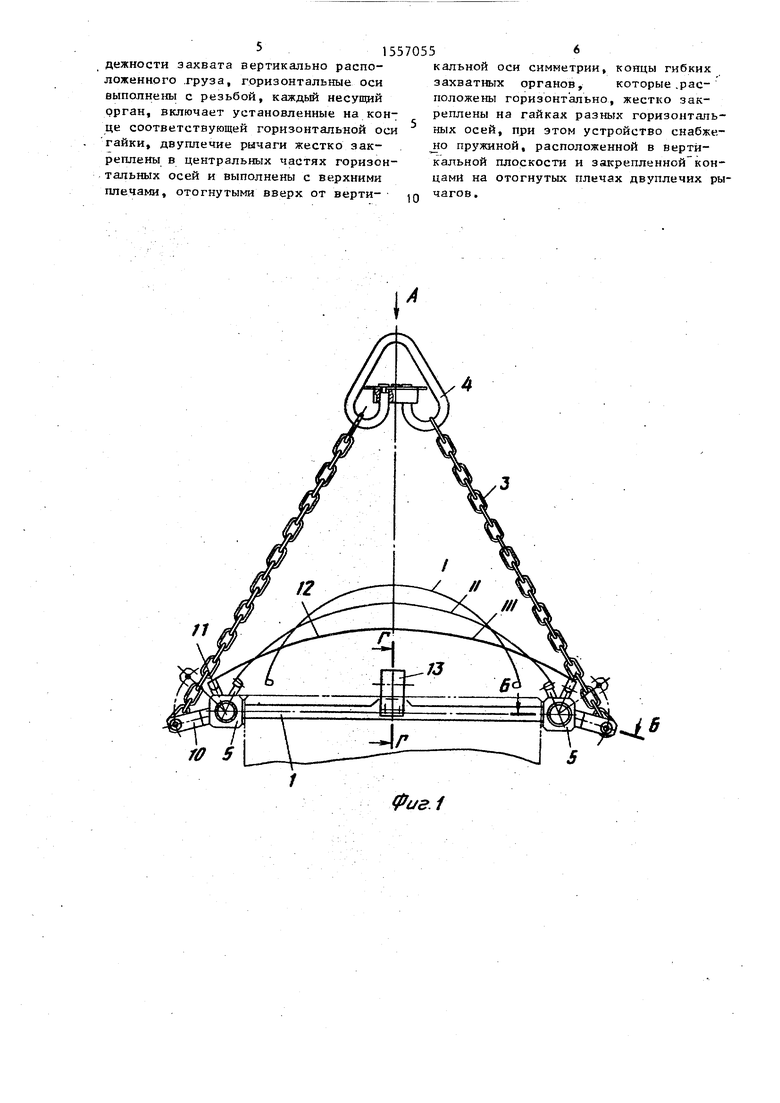
подвеской 4, а верхние плечи 11 отогнуты и соединены между собой пружиной 4П вывинчивая его из гаек 5 и 6, 12, Для предупреждения перекоса, в горизонтальной плоскости кольцевого кон Тура в средней части захватных органов 1 и 2 закреплены ручки 13.
Устройство работает следующим об- 45 разом.
В исходном положении, благодаря пружинным свойствам, пружина 12 и гибкие захватрые органы I и 2 произвольПри опускании груз устан / ся на грузоприемную площадку, ги 3 подвески 4 провисают. П ме на пружину 12 сверху верх чи 1 рычагов 9 поворачивают
тате чего захватные органы 1 аметрально разводятся в стор вобождая емкость от зажима, Формула изобрет
Захватное устройство для круглого сечения, содержащее женные диаметрально друг дру щие органы, гибкие захватные
0
5
05-JQ
35
4П вывинчивая его из гаек 5 и 6, ние плечи 10 рычагов 9 поворачиваются наружу на некоторый угол.
На этот же угол поворачиваются горизонтальные оси 7, вывинчиваясь из гаек 5 и 6, Вследствие жесткой взаимосвязи гаек 5 и 6 с захватными органами 1 и 2 и за счет противоположного направления резьбы 8 оси 7 на его концах, а также гаек 5 и 6, при повороте рычагов 9 наружу захватные органы 1 и 2 расходятся диаметрально в противоположные стороны. После освобождения пружины 12 от нагрузки сверху, она стремится к своему исходному положению и поворачивает внутрь рычаги 9, а вместе с ними оси 7, Горизонтальные оси 7, ввинчиваясь при этом в гайки 5 и 6, обеспечивают диаметральное смещение захватных органов 1 и 2 к центру груза и таким образом обеспечивает предварительное обжатие ими груза.
При подъеме подвески 4, в результате натяжения гибких тяг 3, нижние плечи 10 рычагов 9 поворачиваются внутрь. Вместе с ними поворачиваются верхние плечи 11 рычагов 9 и оси 7, а гайки 5 и 6, за счет разного направления резьбы 8 их винтового соединения с горизонтальными осями 7, навинчиваются на него, обеспечивая, таким образом, диаметральное смещение гибких захватных органов 1 и 2 к центру груза и, следовательно, его зажим,
При опускании груз устанавливает- / ся на грузоприемную площадку, гибкие тяги 3 подвески 4 провисают. При нажиме на пружину 12 сверху верхние плечи 1 рычагов 9 поворачивают оси 7,
в результате чего захватные органы 1 и 2 диаметрально разводятся в стороны, освобождая емкость от зажима, Формула изобретения
Захватное устройство для груэ ов круглого сечения, содержащее расположенные диаметрально друг другу несущие органы, гибкие захватные органы,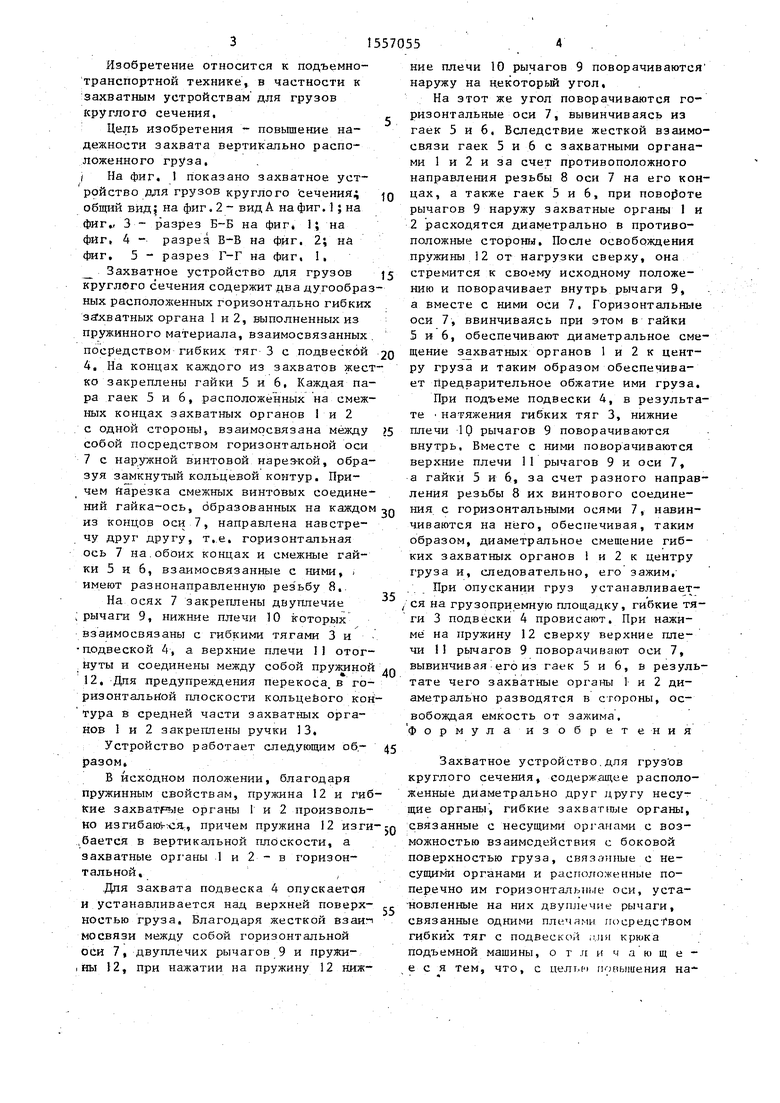
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1991 |
|
SU1812160A1 |
| Захват-кантователь | 1991 |
|
SU1794850A1 |
| Захват-кантователь для грузовцилиНдРичЕСКОй фОРМы | 1979 |
|
SU850544A2 |
| Захватное устройство | 1988 |
|
SU1581677A1 |
| Грузозахватное устройство | 1989 |
|
SU1726352A1 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
| Грузозахватное устройство | 1991 |
|
SU1798288A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| АГРЕГАТ ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ | 1991 |
|
RU2014458C1 |
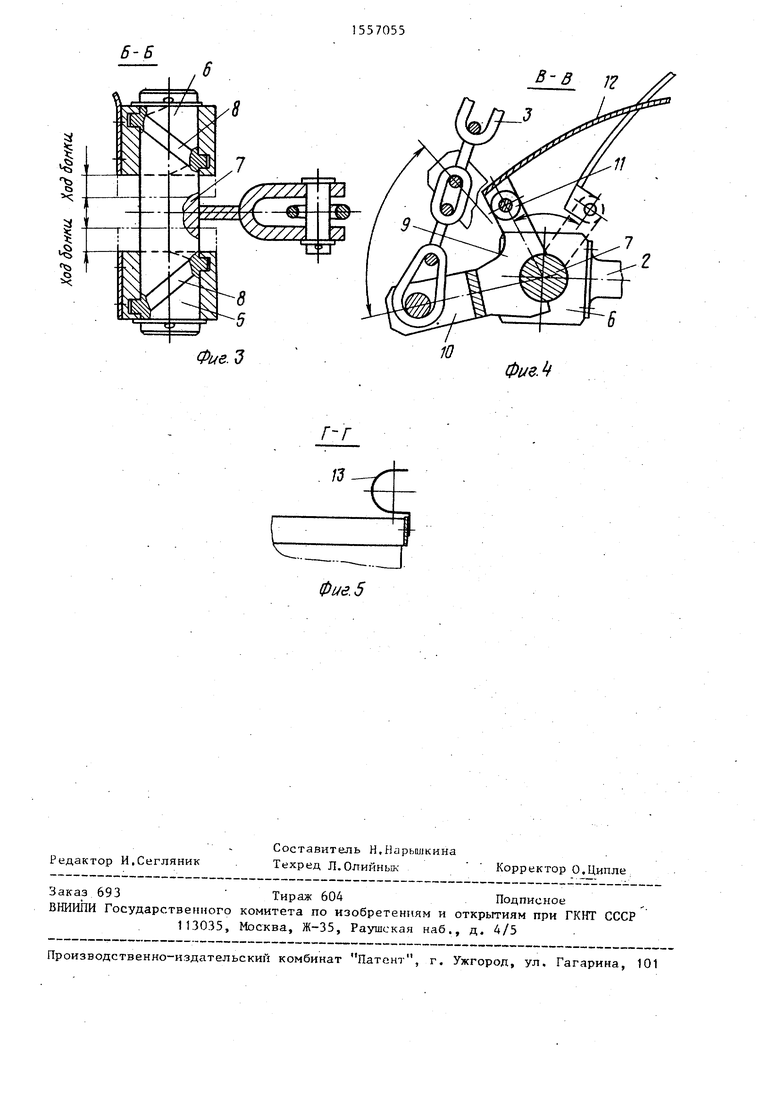
Изобретение относится к подъемно-транспортному оборудованию, в частности к захватным устройствам для грузов круглого сечения. Целью изобретения является повышение надежности захвата вертикально расположенного груза. Захватное устройство для грузов круглого сечения содержит гибкие захватные органы 1, 2, связанные с гайками 5, 6, установленными на горизонтальных осях 7, на которых закреплены двуплечие рычаги, нижние плечи которых связаны гибкими тягами 3 с подвеской 4, а верхние плечи - пружиной 12. 5 ил.
но изгибаются, причем пружина 12 ИЗГИ-JQ связанные с несущими органами с воз,бается в вертикальной плоскости, а захватные органы 1 и 2 - в горизонтальной,,
Для захвата подвеска 4 опускается и устанавливается над верхней поверхностью груза. Благодаря жесткой взаи-i мосвязи между собой горизонтальной оси 7, двуплечих рычагов 9 и пружиiны 12, при нажатии на пружину 12 ниж55
можностью взаимодействия с боковой поверхностью груза, связанные с несущими органами и расположенные поперечно им горизонтальные оси, установленные на них двуплечие рычаги, связанные одними плечами посредством гибких тяг с подвеской ,MIH крюка подъемной машины, отличающееся тем, что, с цельи гкжышения насвязанные с несущими органами с воз
можностью взаимодействия с боковой поверхностью груза, связанные с несущими органами и расположенные поперечно им горизонтальные оси, установленные на них двуплечие рычаги, связанные одними плечами посредством гибких тяг с подвеской ,MIH крюка подъемной машины, отличающееся тем, что, с цельи гкжышения надежности захвата вертикально расположенного груза, горизонтальные оси выполнены с резьбой, каждый несущий орган, включает установленные на конце соответствующей горизонтальной оси гайки, двуплечие рычаги жестко закреплены в центральных частях горизонтальных осей и выполнены с верхними плечами, отогнутыми вверх от верти/;
калькой оси симметрии, концы гибких захватных органов, которые .расположены горизонтально, жестко закреплены на гайках разных горизонтальных осей, при этом устройство снабжено пружиной, расположенной в вертикальной плоскости и закрепленной концами на отогнутых плечах двуплечих рычагов.
Фиг.1
5-6
Фие.З
Фие.5
фив-Ц
| Устройство для захвата цилиндрических грузов | 1973 |
|
SU485948A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
