Изобретение относится к подъемно- транспортному оборудованию и может быть использовано на заводах стройиндустрии при теплоизоляции труб.
Известен автоматический захват для грузов, содержащий траверсу, состоящую из верхней и нижней балок, поворотные рычаги с подхватными лапами, шарнирно установленные на б злке и связанные тягами с
«и
балкой, механизм фиксации положения ры- чагб1 1 р ёгУл и руЬмы полвысоте упоры. Захват не обеспёчйваегвозможность подъема и перемещения грузов без предварительного зажима, что снижает его технологические возможности.
Известен также автоматический захват для перемещения штучных грузов, содержащий траверсу, соединенную с механизмом подъема, грузонесущую раму с закрепленными на ней поворотными захватными крюками, дополнительную раму, подвешенную посредством гибких связей к траверсе. Недостаток этого захвата заключается в том, что для управления работой механизма фиксации грузонесущая рама и траверса с подвешенной к ней дополнительной рамой опираются на груз, что не гарантирует его сохранность.
Целью изобретения является обеспечение сохранности груза.
Указанная цель достигается тем, что грузозахватная система, содержащая механизм перемещения, включающий горизонтально расположенный направляющий орган, механизм подъема, включающий траверсу, катки, расположенные на направляющем органе механизма перемещения, и подвижное в вертикальной плоскости от привода грузозахватное устройство, включающее несущую балку, расположенную параллельно траверсе, шарнирно закрепленные на ней двуплечие захватные рычаги, и расположенную параллельно несущей балке грузовую балку, шарнирные тяги, закрепленные нижними концами на верхних плечах Захватных рычагов, верхними - на грузовой балке, механизм фиксации положения двуплечих захватных рычагов, включающий ползун и направляющий элемент, расположенные в вертикальной плоскости направляющие для перемещения грузозахватное устройство, и гибкие элементы, концы которых закреплены на траверсе механизма подъема, направляющий орган расположен поперечно траверсе механизма подъема, грузовая балка расположена над несущей балкой, жестко связана с верхней частью ползуна механизма фиксации положений двуплечих захватных рычагов, направляющий элемент которого жестко закреплен на несущей балке, катки механизма подъема закреплены на траверсе, гибкие элементы охватывают средними своими частями несущую балку с возможностью изменения длины, упомянутые направляющие жестко закреплены на верхней плоскости траверсы, при этом грузозахватное устройство снабжено штангами, жестко закрепленными нижними концами на грузовой
0 балке и расположенными в направляющих. дополнительными двуплечими захватными рычагами на их шарнирах связи с несущей балкой и расположенными в параллельных плоскостях, поперечно плоскости располо5 жения несущей балки, и дополнительными шарнирными тягами, верхние концы которых закреплены на грузовой балке, а нижние - на верхних плечах дополнительных двуплечих захватных рычагов.
0 На фиг. 1 изображена грузозахватная система, общий вид; на фиг. 2 - разрез А-А на фиг. 1..
Предлагаемая грузозахватная система содержит механизм перемещения выпол5 пенных в виде горизонтального направляющего органа 1 механизм подъема. включающий траверсу 2 которая перемещается при помощи катков 3 по направляющему органу 1 механизма перемещения. На
0 траверсе 2 установлен привод 4. соединенный с грузозахватным устройством, включающем грузовую балку 5 расположенную под траверсой 2 параллельно последней.
Под грузовой балкой 5 размещена несу5 щая балка б оединенная с грузовой балкой 5 при помощи шарнирных тяг 7 и захватных рычагов 8. При этом шарнирные тяги 7 одним концом прикреплены к грузовой балке 5, а другим к верхним плечам захватных
0 рычагов 8. Рычаги 8 закреплены на несущей балке с возможностью поворота. Между грузовой 5 и несущей б балками размещен механизм фиксации положений двуплечих захватных рычагов, включающий ползун 9 и
5 направляющий элемент 10. На траверсе 2 размещены направляющие 11, в которых установлены с возможностью перемещения штанги 12, жестко прикрепленные к грузовой балке 5 грузозахватного устройства.
0 При этом грузозахватное устройство подвешено при помощи гибких элементов 13, концы которых закреплены посредством механизмов 14 изменения длины на траверсе 2. Гибкие элементы 13 охватывают сред5 ними своими частями несущую балку 6. На грузовой балке 5 закреплены два узла подвески 15, через которые пропущены гибкие стальные канаты 16 механизма подъема, закрепленного на траверсе 2. Для управления грузозахватным устройством система снабжена конечными выключателями 17, установленными на направляющих 11 для ограничения высоты подъема, и выключателем 18, взаимодействующим с канатом 16 при помощи рычагов 19 для ограничения опускания грузозахватного устройства. .
Система работает следующим образом.
Траверса 2, перемещаясь катками 3 по направляющему органу 1, останавливается над грузом.;
При этом грузозахватное устройство с разведенными захватными рычагами 8 опу-. скается вниз, несущая балка б зависает на гибких элементах 13, а грузовая балка 5 продолжает опускаться и под собственным весом разводит захватные рычаги 8 до отказа и, воздействуя на механизм фиксации положений рычагов 8,расфиксирует его. После чего грузовая балка 5 останавливается, канаты 16 ослабляются и провисают, а рычаг 19 вступают в контакт с выключателем 18 и отключают привод 4 механизма подь- ема. .
После этого привод 4 переключается на подъем груза. Поднимается балка 5 и тягами 7 сводит захватные рычаги 8, которые замыкаются под грузом. При дальнейшем подъеме груз подхватывается рычагами 8 и снимается со стеллажа. Достигнув верхнего положения грузовая балка 5 посредством штанг 12 воздействует на конечные выключатели 17 и грузозахватное устройство отключается.
После перемещения в зону укладки груза с помощью механизма подъема не-, сущая балка 7 опускается вместе с грузом вниз. Зависая на гибких элементах 13, балка 6 останавливается, а грузовая балка 5, продолжая движение вниз, воздействует на захватные рычаги 8 через шарнирные тяги 7, и освобождает груз. Одновременно при этом воздействуя на механизм фиксации устанавливает захватные рычаги 8 в разведенном положении путем фиксации взаимного расположения балок 5 и 6. В дальнейшем грузозахватное устройство поднимается и механизм подъема перемещается для подъема и укладки следующего груза. Цикл повторяется.
Использование гибких элементов для подвески несущей балки и обеспечение грузовой балки штангами, а траверсы направляющими исключает опирание грузозахватного устройства на груз и его раскачивание, благодаря чему исключается повреждение изоляционного слоя груза.
Формула изобретения Грузозахватная система, содержащая
механизм перемещения, включающий горизонтально расположенный направляющий орган, механизм подъема, включающий траверсу, катки, расположенные на направляющем органе механизма перемещения, и
подвижное в вертикальной плоскости от привода грузозахватное устройство, включающее несущую балку, расположенную параллельно траверсе, шарнирно закрепленные на ней двуплечие захватные рычаги
и расположенную параллельно несущей балке грузовую балку, шарнирные тяги, закрепленные нижними концами на верхних плечах захватных рычагов, верхними - на грузовой балке, механизм фиксации положений двуплечих захватных рычагов, включающий ползун и направляющий элемент, расположенные в вертикальной плоскости, направляющие для перемещения грузозахватного устройства и гибкие элементы, концы которых закреплены на траверсе механизма подъема, отличающаяся тем, что, с целью обеспечения сохранности груза, направляющий орган расположен поперечно траверсе механизма подъема, грузовая балка расположена над несущей балкой, жестко связана с верхней частью ползуна механизма фиксации положений двуплечих захватных рычагов, направляющий элемент которого жестко закреплен на
несущей балке, катки механизма подъема закреплены на траверсе, гибкие элементы охватывают средними своими частями несущую балку с возможностью изменения длины, упомянутые направляющие жестко
закреплены на верхней плоскости траверсы, при этом грузозахватное устройство снабжено штангами, жестко закрепленными нижними концами на грузовой балке и расположенными в направляющих, дополнительными двуплечими захватными рычагами, закрепленными перекрестно с основными двуплечими захватными рычагами на их шарнирах связи с несущей балкой и расположенными в параллельных плоскостях, поперечных плоскости расположения несущей балки, и дополнительными шарнирными тягами, верхние концы которых закреплены на грузовой балке, а нижние - на верхних плечах дополнительных двуплечих захватных рычагах.
А-А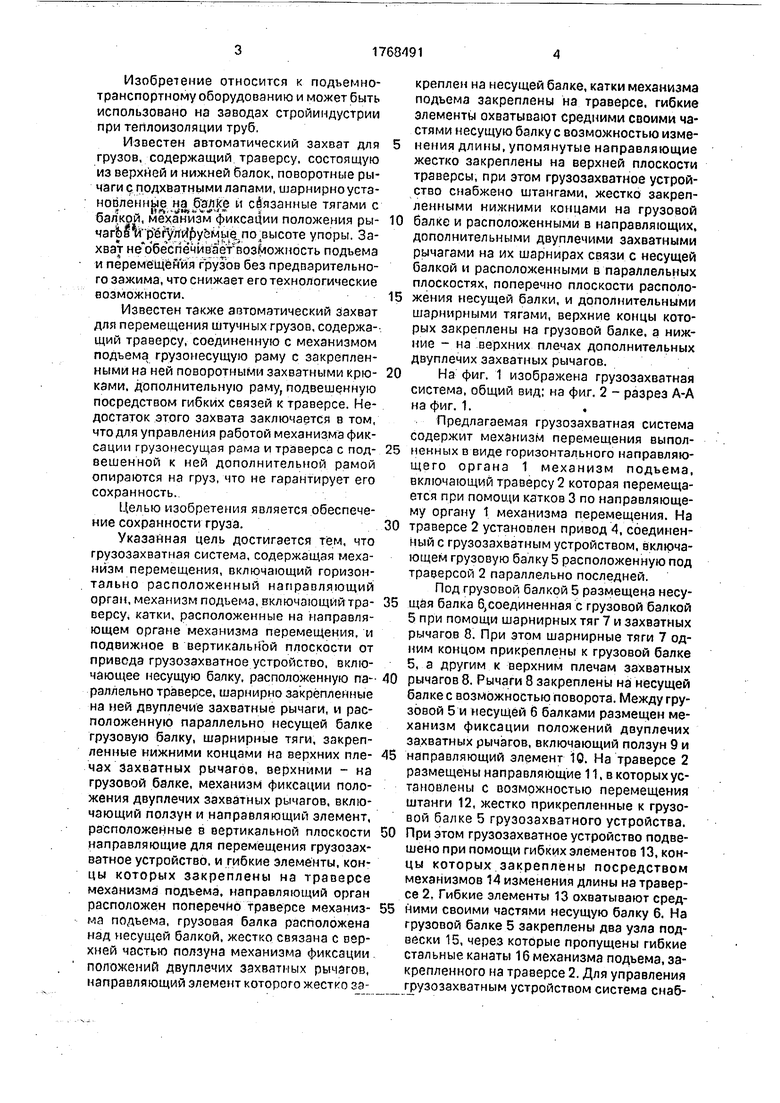
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Грузозахватное устройство | 1991 |
|
SU1798288A1 |
| Грузозахватное устройство | 1989 |
|
SU1726352A1 |
| Траверса с захватами за бугели | 2016 |
|
RU2652761C1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Грузозахватное устройство для загрузки ряда заготовок в печь графитации | 1990 |
|
SU1796579A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Грузозахватная траверса | 1982 |
|
SU1142419A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство | 1989 |
|
SU1776623A1 |
Использование: захват груза с теплоизоляцией. Сущность, изобретения: грузозахватная система содержит направляющий орган, механизм подъема, включающий траверсу и катки, грузозахватное устройство с несущей балкой, захватные рычаги тяги и гибкие элементы, огибающие несущую балку, связанные концами с траверсой и служащие опорами для срабатывания механизма фиксации захватных рычагов. 2 ил. фиг 1
фае 2.
| АВТОМАТИЧЕСКИЙ ЗАХВАТ | 0 |
|
SU347279A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 0 |
|
SU336255A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
