Изобретение относится к подъемно- транспортному оборудованию, в частности х грузозахватным устройствам для подъема и перемещения массивов при демонтаже гидротехнических сооружений, занесенных донными отложениями.
Цель изобретения - расширение эксплуатационных возможностей захвата путем обеспечения освобождения груза от донных от/Гожений в водоеме.
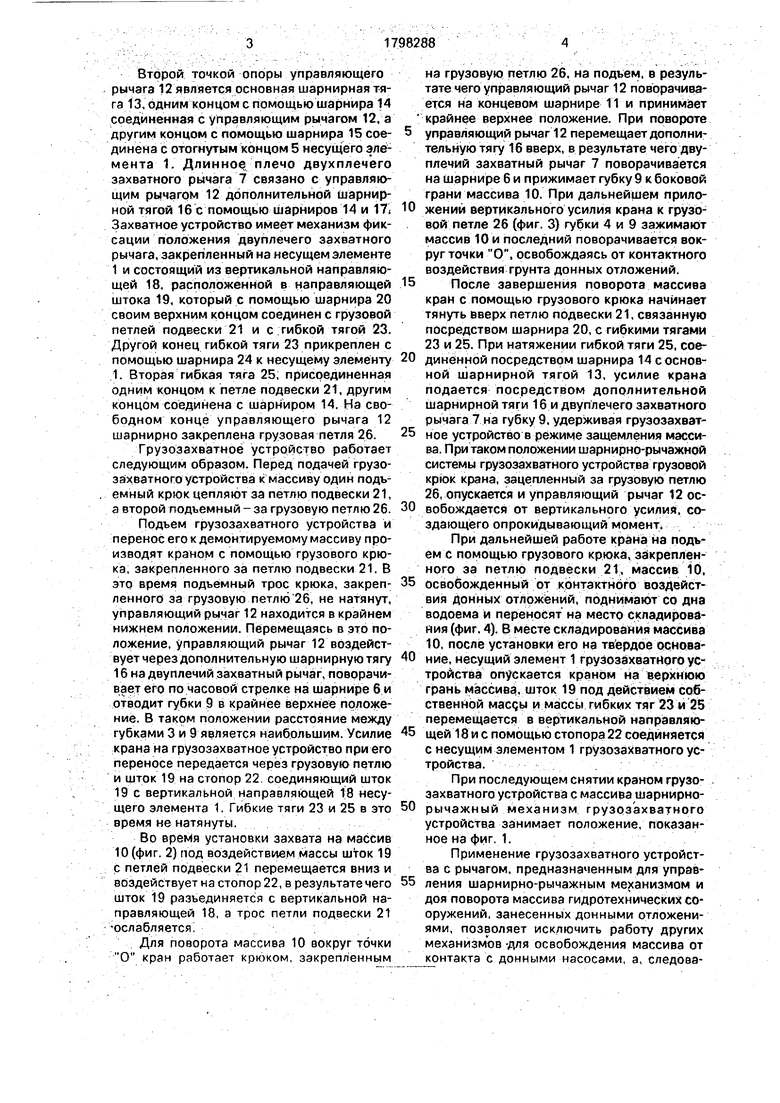
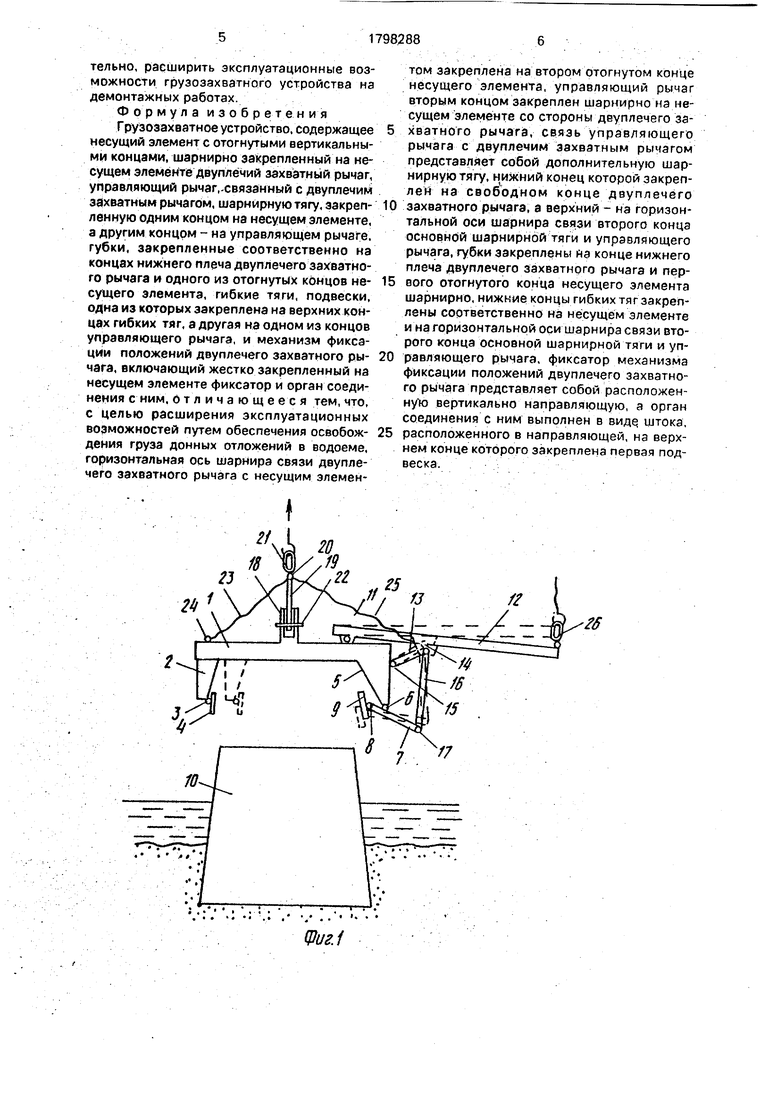
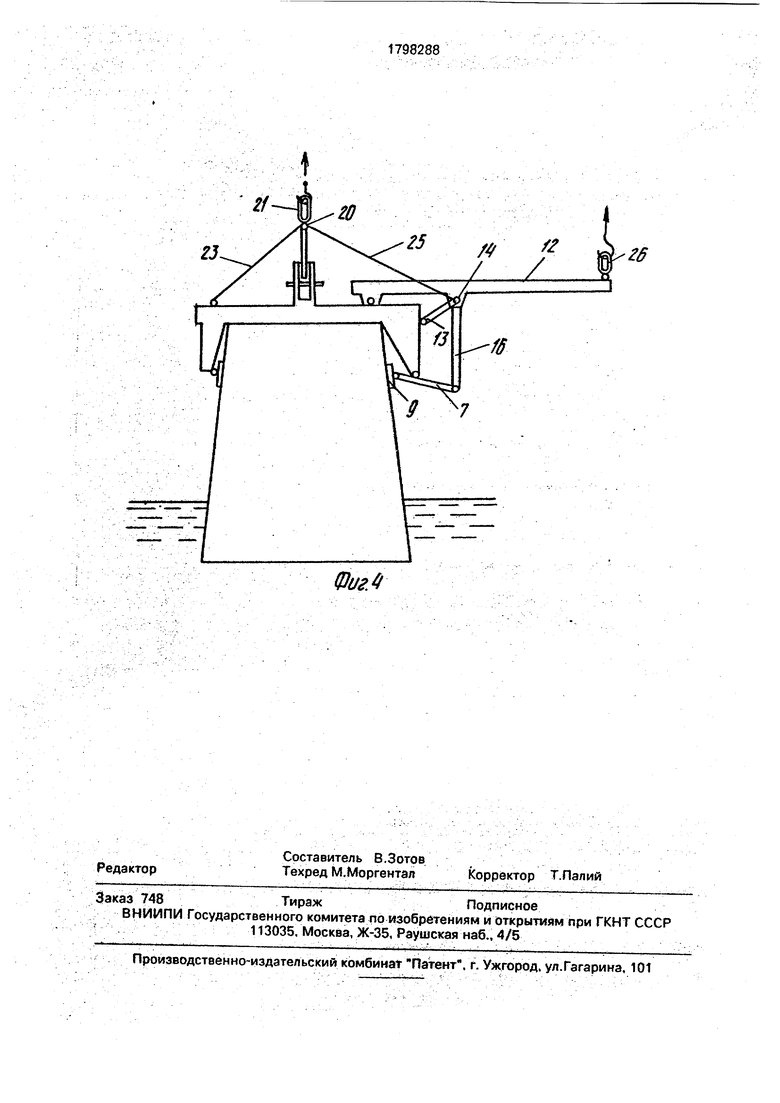
На фиг. 1 показан общий вид грузозахватного устройства перёд установкой на массив; на фиг. 2 - грузозахватное устройство, установленное на массив; на фиг 3 - положение грузозахватного устройства на массиве после его поворота; на фиг. 4 - подъем массива грузозахватным устройством после поворота.
/
Грузозахватное устройство (фиг. 1) состоит из несущего элемента 1, на одном торце которого расположен подвижной ото- /нутый конец 2, к которому с помощью шарнира 3 подвижно прикреплена губка 4. На противоположном торце несущего элемента расположен неподвижный отогнутый конец 5, на котором с помощью горизонтальной оси шарнира подвижно закреплен двуплечий рычаг 7. На одном конце двупле- чего захватного рычага 7 с помощью шарнира 8 подвижно прикреплена губка 9.
Благодаря возможности перемещения отогнутого конца 2 относительно несущего элемента 1 (на фиг. 1 подвижный конец в перемещенном положении показан пунктиром), захватным устройством можно поднимать и перемещать блоки 10 различной ширины а благодаря возможности поворота губок 4 и 9 на шарнирах 3 и 8 боковые грани массива 10, в которые упирается губка, могут иметь различный наклон относительно вертикали. К несущему элементу 1 с помощью концевого шарнира 11 одним своим концом прикреплен управляющий рычаг 12 с возможностью поворота на некоторый угол в вертикальной плоскости. Рычаг 12 в положении поворота показан пунктиром. Концевой шарнир 11 управляющего рычага имеет возможность перемещения на некоторое расстояние по несущему элементу 1.
со С
XI
О 00
ю
00
00
Второй точкой опоры управляющего рычага 12 является основная шарнирная тяга 13, одним концом с помощью шарнира 14 соединенная с управляющим рычагом 12, а другим концом с помощью шарнира 15 соединена с отогнутым концом 5 несущего элё- мента 1. Длинное плечо двухплечего захватного рычага 7 связано с управляющим рычагом 12 дополнительной шарнирной тягой 16 с помощью шарниров 14 и 17 Захватное устройство имеет механизм фиксации положения двуплечего захватного рычага, закрепленный на несущем элементе 1 и состоящий из вертикальной направляющей 18, расположенной в направляющей штока 19, который с помощью шарнира 20 своим верхним концом соединен с грузовой петлей подвески 21 и с гибкой тягой 23. Другой конец гибкой тяги 23 прикреплен с помощью шарнира 24 к несущему элементу 1. Вторая гибкая тяга 25, присоединенная одним концом к петле подвески 21, другим концом соединена с шарниром 14. На свободном конце управляющего рычага 12 шарнирно закреплена грузовая петля 26.
Грузозахватное устройство работает следующим образом. Перед подачей грузозахватного устройства к массиву один подъемный крюк цепляют за петлю подвески 21, а второй подъемный - за грузовую петлю 26.
Подъем грузозахватного устройства и перенос его к демонтируемому массиву производят краном с помощью грузового крюка, закрепленного за петлю подвески 21. В это время подъёмный трос крюка, закрепленного за грузовую петлю 26, не натянут, управляющий рычаг 12 находится в крайнем нижнем положении. Перемещаясь в это положение, управляющий рычаг 12 воздействует через дополнительную шарнирную тягу 16 на двуплечий захватный рычаг, поворачивает его по часовой стрелке на шарнире 6 и отводит губки 9 в крайнее верхнее положение. В таком положении расстояние между губками 3 и 9 является наибольшим. Усилие крана на грузозахватное устройство при его переносе передается через грузовую петлю и шток 19 на стопор 22. соединяющий шток 19 с вертикальной направляющей 18 несущего элемента 1. Гибкие тяги 23 и 25 в это время ненатянуты.
Во время установки захвата на массив 10(фиг. 2) под воздействием массы шток 19 С петлей подвески 21 перемещается вниз и воздействует на стопор 22, в результате чего шток 19 разъединяется с вертикальной направляющей 18, а трос петли подвески 21 ослабляется,
Для поворота массива 10 вокруг точки О кран работает крюком, закрепленным
на грузовую петлю 26, на подъем, в результате чего управляющий рычаг 12 поворачивается на концевом шарнире 11 и принимает крайнее верхнее положение. При повороте
управляющий рычаг 12 перемещает дополнительную тягу 16 вверх, в результате чего двуплечий захватный рычаг 7 поворачивается на шарнире 6 и прижимает губку 9 к боковой грани массива 10. При дальнейшем приложений вертикального усилия крана к грузовой петле 26 (фиг. 3) губки 4 и 9 зажимают массив 10 и последний поворачивается вокруг точки О, освобождаясь от контактного воздействия грунта донных отложений.
5 После завершения поворота массива кран с помощью грузового крюка начинает тянуть вверх петлю подвески 21, связанную посредством шарнира 20, с гибкими тягами 23 и.25. При натяжении гибкой тяги 25, сое0 диненной посредством шарнира 14 соснов- ной шарнирной тягой 13, усилие крана подается посредством дополнительной шарнирной тяги 16 и двуплечего захватного рычага 7 на губку 9, удерживая грузозахват5 ное устройство в режиме защемления массива. При таком положении шарнирно-рычажной системы грузозахватного устройства грузовой крюк крана, зацепленный за грузовую петлю 26, опускается и управляющий рычаг 12 ос0 вобождается от вертикального усилия, создающего опрокидывающий момент,
При дальнейшей работе крана на подъеме помощью грузового крюка, закрепленного за петлю подвески 21, массив 10,
5 освобожденный от контактного воздействия донных отложений, поднимают со дна водоема и переносят на место складирования (фиг. 4). В месте складирования массива 10, после установки его на твердое основа0 ние, несущий элемент 1 грузозахватного устройства опускается краном на верхнюю грань массива, шток 19 под действием собственной масды и массы гибких тяг 23 и 25 перемещается в вертикальной напрэвляю5 щей 18 и с помощью стопора 22 соединяется с несущим элементом 1 грузозахватного устройства.
При последующем снятии краном грузозахватного устройства с массива шарнирно0 рычажный механизм грузозахватного устройства занимает положение, показанное на фиг. 1.
Применение грузозахватного устройства с рычагом, предназначенным для упрэв5 ления шарнирно-рычажным механизмом и доя поворота массива гидротехнических сооружений, занесенных донными отложениями, позволяет исключить работу других механизмов -для освобождения массива от контакта с донными насосами, а, следоаательно, расширить эксплуатационные возможности грузозахватного устройства на демонтажиых работах.
Формула изобретения Грузозахватное устройство, содержащее несущий элемент с отогнутыми вертикальными концами, шарнирно закрепленный на несущем элементе двуплёчий захватный рычаг, управляющий рычаг.-связэнный с двуплечим захватным рычагом, шарнирную тягу, закреп- ленную одним концом на несущем элементе, а другим концом - на управляющем рычаге, губки, закрепленные соответственно на концах нижнего плеча двуплечего захватного рычага и одного из отогнутых концов не- сущего элемента, гибкие тяги, подвески, одна из которых закреплена на верхних концах гибких тяг, а другая на одном из концов управляющего рычага, и механизм фиксации положений двуплечего захватного ры- чага, включающий жестко закрепленный на несущем элементе фиксатор и орган соединения с ним, от л и ч а ю щ е ее я тем, что, с целью расширения эксплуатационных возможностей путем обеспечения освобож- дения груза донных отложений в водоеме, горизонтальная ось шарнира связи двуплечего захватного рычага с несущим элементом закреплена на втором отогнутом конце несущего элемента, управляющий рычаг вторым концом закреплен шарнирно на несущем элементе со стороны двуплечего захватного рычага, связь управляющего рычага с двуплечим захватным рычагом представляет собой дополнительную шарнирную тягу, нижний конец которой закреплен на свободном конце двуплечёго захватного рычага, а верхний - на горизонтальной оси шарнира связи второго конца основной шарнирной тяги и управляющего рычага, губки закреплены из конце нижнего плеча двуплечего захватного рычага и первого отогнутого конца несущего элемента шарнирно, нижние концы гибких тяг закреплены соответственно на несущем элементе и на горизонтальной оси шарнира связи второго конца основной шарнирной тяги и управляющего рычага, фиксатор механизма фиксации положений двуплечего захватного рычага представляет собой расположенную вертикально направляющую, а орган соединения с ним выполнен в видд штока, расположенного в направляющей, на верхнем конце которого закреплена первая подвеска.
в :- -. /; :. .
Фиг.3
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1744034A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Захват-кантователь | 1990 |
|
SU1752708A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Грузозахватное устройство | 1990 |
|
SU1794847A1 |
| Грузозахватное устройство | 1987 |
|
SU1532510A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Грузозахватное устройство | 1988 |
|
SU1595779A1 |
| Устройство для временной подвески обожженных анодов | 1990 |
|
SU1710599A1 |
Использование: захват и транспортировка грузов. Сущность изобретения: устройство содержит несущий элемент, связываемый с подъемным механизмом, выполненный с отогнутыми вниз концами, шарнирно закрепленный на одном из отогнутых концов, двуплечий захватный р ычаг, связываемый с подъемным механизмом управляющий рычаг, шарнирно закрепленный на несущем элементе и кинематически связанный с несущим элементом для обеспечения поворота груза при его отрыве от поверхности. 4 ил.
| Захват-кантователь | 1976 |
|
SU609710A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
