9 г
жЖ
7/
;5
1
S
(Л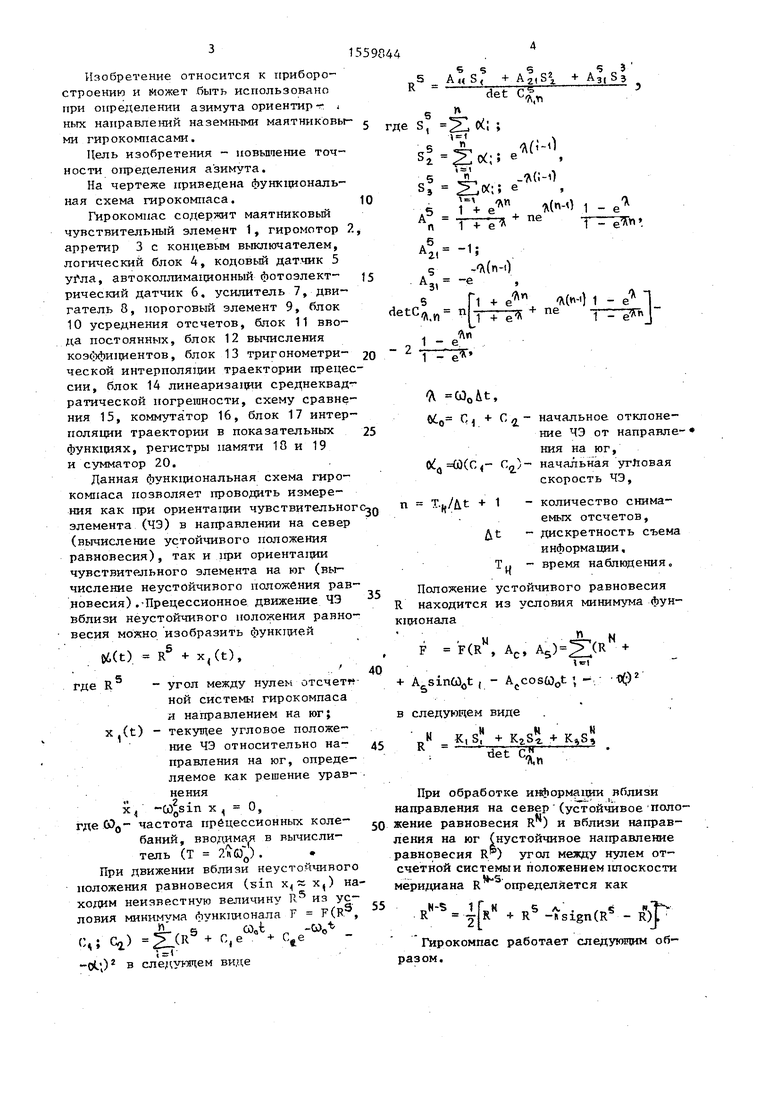
| название | год | авторы | номер документа |
|---|---|---|---|
| Гирокомпас | 1982 |
|
SU1559842A1 |
| Способ определения направления меридиана гирокомпасом | 1978 |
|
SU1602141A1 |
| Способ определения плоскости меридиана гирокомпасом | 1980 |
|
SU1583742A1 |
| Способ определения меридиана маятниковым гирокомпасом | 1981 |
|
SU1035423A1 |
| Способ измерения азимута наземным гирокомпасом | 1979 |
|
SU1622760A1 |
| Маркшейдерский гирокомпас | 1990 |
|
SU1808119A3 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2656263C1 |
| Устройство для ориентации сейсмоприемников в скважине | 1980 |
|
SU935851A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ДИНАМИЧЕСКИЙ ГИРОКОМПАС | 2020 |
|
RU2754964C1 |
Изобретение относится к приборостроению и монет быть использовано при определении азимута ориентиркь х направлений наземнымми маятниковыми гирокомпасами. Центр изобретения - повышение точности определения азимута. Функциональная схема гирокомпаса позволяет обработать информацию об неуправляемом движении чувствительного элемента {43) 1 в двух положениях 1фи , ориентации 43 в направлении на север (устойчивое положение равновесия) и в направлении на юг (неустойчивое положение равновесия) и вычислить азимут с исключением систематических логренностей 1 ил.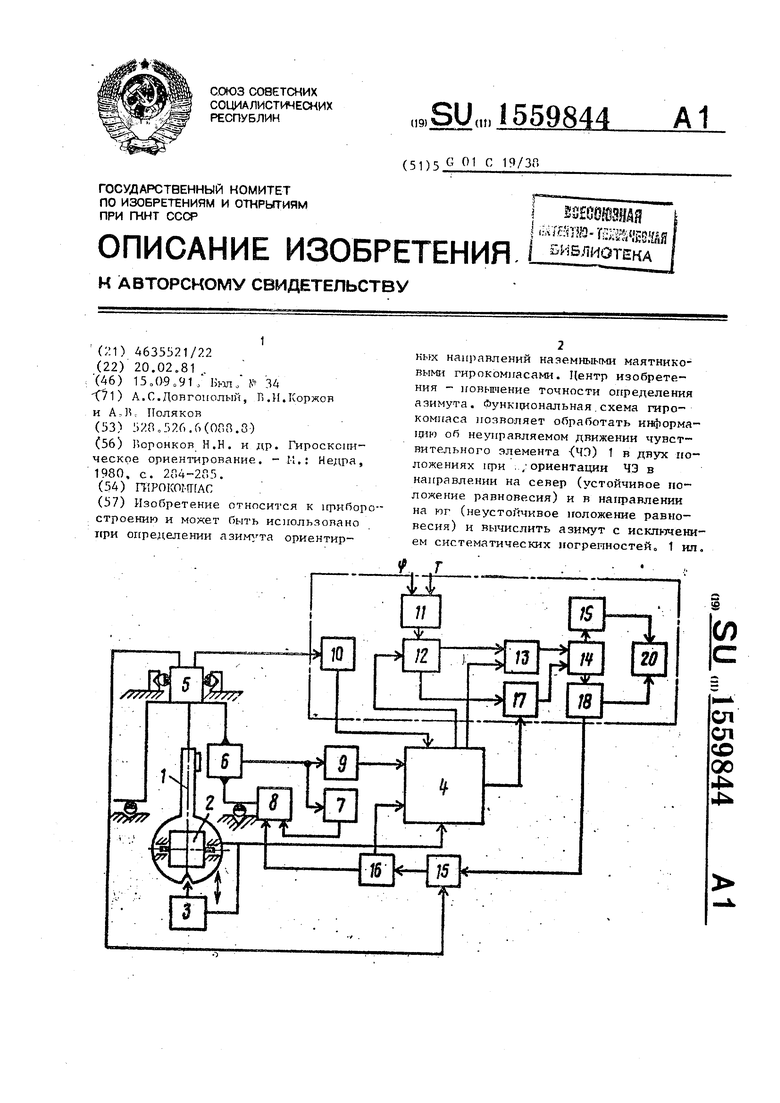
WZtlil -I гп
- /7 J Ю
20
ел ел
со
00 4 4
2
Изобретение относится к приборостроению и Может быть использовано при определении азимута ориентир- t ных направлений наземными маятниковыми гирокомпасами.
Цель изобретения - повышение точности определения азимута.
На чертеже приведена функциональная схема гирокомпаса.
Гирокомпас содержит маятниковый чувствительный элемент 1, гиромотор арретир 3 с концевым выключателем, логический блок 4, кодовый датчик 5 угла, автоколлимационный фотоэлектрический датчик 6, усилитель 7, двигатель 8, пороговый элемент 9, блок 10 усреднения отсчетов, блок 11 ввода постоянных, блок 12 вычисления коэффициентов, блок 13 тригонометрической интерполяции траектории прецессии, блок 14 линеаризации среднеквад- ратической погрешности, схему сравнения 15, коммутатор 16, блок 17 интерполяции траектории в показательных функциях, регистры памяти 18 и 19 и сумматор 20.
Данная функциональная схема гирокомпаса позволяет проводить измерения как при ориентации чувствительног элемента (ЧЭ) в направлении на север (вычисление устойчивого положения равновесия), так и при ориентации чувствительного элемента на юг (вычисление неустойчивого положения равновесия) . Прецессионное движение ЧЭ вблизи неустойчивого положения равновесия можно изобразить функцией
6i(t) RS + x,(t),
Где R1
x,(t)
- угол между нулем отсчет ной системы гирокомпаса я направлением на юг; - текущее угловое положение ЧЭ относительно направления на юг, определяемое как решение уравнения
х, х , О,
где Ј(- частота прецессионных колебаний, вводимая в вычислитель (Т ) .
При движении вблизи неустойчивого положения равновесия (sin x х,) находим неизвестную величину Р,5 из ус. ./ S
ловия минимума функционала F F(F
с„ -., - -%t
rrl
ОС;)2 в следующем виде
Cte
«
R
10
,
15
20
25
5 где S
А
Set;;
R1
г,
5 2.
П
AJ n
4
AS A3i
e
-An
+ ne
1 + е
fl(i-0
-M-1)
9
(-)
1+e
-i;
-«A(n-0 -e
1-е Т - VM«.
s Pi det(4n
4flr
+ e
fln
+ e
+ ne
A(H 1 - e
1 - e
1 TTnJ- 2
1 - e 1 - e
A ,
o C.
c4eCa(fl(cr
T.H/ut + 1
At т ТЧ
начальное отклонение ЧЭ от направле- ния на юг, начальная угловая скорость ЧЭ,
количество снимаемых отсчетов, дискретность съема информации, время наблюдения„
Положение устойчивого равновесия R находится из условия минимума функционала
При обработке информации вблизи направления на север (устойчивое поло- жение равновесия RN) и вблизи направления на юг (нустойчивое направление равновесия R) угол между нулем отсчетной системыи положением плоскости
меридиана R определяется как
R
Н-5
lfRH 2lR
R5 -tsign(R
Гирокомпас работает следующим образом.
э15
После разгона гиромотора 2, раз- арретирования чувствительного элемента 1 механизмом арретира 3, отслеживания за движением ЧЭ при помощи авто- коллимационного фотодатчика 6, усилителя 7 и исполнительного двигателя , снятия информации с кодового датчика 5 угла, преобразования и анализа информации при помогай порогового элемента 9 и логического блока А и обработки ее в вычислителе с целью О1гределе- ния R , состоящем из блока 10 усреднения отсчетов, блока 11 ввода постоянных, блока 12 вычислений коэффици- ентов (Кл, К, К), блока 13 тригонометрической интерполяции траектории прецессии (S,, Sa, Sj) и блока 14 линеаризации среднеквадратической погрешности апроксимации траектории прецессии, положение R запоминается в регистре памяти 18. После чего данные о положении устойчивого равновесия R в схеме сравнения 15 -сравниваются с данными об угловом положении ЧЭ 1 и происходит разворот 43 в положение ориентации на юг (К + 180°) при помощи двигателя 8 с отключением его через коммутатор 16. Коммутатор 16 через логический блок 4 запуска- ет вычислитель на набор и обработку информации и усредненные данные о положении ЧЭ с блока усреднения 10 поступают в блок 17 интерполяции траектории в показательных функциях (S, S), на другой вход которого подаются коэффициенты (А, Az, A) с блока 12 вычислений коэффициентов, Вычисленное значение положения неустойчивого равновесия 43 запоми- нается в регистре памяти 19. Выходы . регистров 18 и 19 связаны с входом алгебраического сумматора 20,в котором по двум значениям RN и R5 находится угол между нулем отсчетной си
стемы и положением плоскости меридиана .
Проведение измерений как при ори-- ентации ЧЭ в направлении на север (вычисление устойчивого положения равновесия ЧЭ), так и при ориентации ЧЭ в направлении на юг по информации об устойчивом положении равновесия (вычисление неустойчивого положения равновесия) даст возможность
П4
Q 5 0 5 0 «
5
5
0
повысить точность (исключить систематические погрешности) гирокомпаса. Формула изобретения
Гирокомпас, содержащий маятниковый чувствительный элемент с гнромг- тором, арретир с концевым выключателем, кодовый датчик угла, установленный по оси подвеса чувствительного элемента, систему отслеживания, включающую последовательно соединенные автоколлимационный фотоэлектрический датчик, усилитель и двигатель, последовательно соединенные блок усреднения отсчетов, логический блок, блок вычисления коэффициентов, блок тригонометрической интерполяции траектории прецессии и блок линеаризации сред- неквадратической погрешности, при этом выход кодового датчика угла соединен с входом блока усреднения отсчетов, второй выход логического блока - с вторым входом блока тригонометрической интерполяции траектории прецессии, выход арретира с концевым выключателем - с вторым входом логического блока, третий вход которого через пороговый элемент соединен с автоколлимапионным фотоэлектрическим датчиком, а также блок ввода постоянных, соединенный с вторым входом блока вычисления коэффициентов, о т- л и ч а т и; к и с я тем} что, с целью повышения точности определения азимутаt в введены последовательно соединенные первый регистр памяти и сумматор, последовательно соединенные второй регистр памяти, схема сравнения и коммутаторs соединенный первым змходом с двигателем, вторым - с четвертым входом логического блока, а также блок интерполяции траектории1 . в показательных функциях, соединенный первым входом с вторым выходом блока вычисления коэффициентов, вторым входом - с третьим выходом логического блока, а выходом - с вторым входом блока линеаризации среднеквад- ратической погрешности, первый и второй выходы которого связаны с входами регистров памяти„ причем второй вход схемы сравнения соединен с выходом кодового датчика утла, а второй вход сумматора - с выходом второго регистра памяти.
| Воронков Н.Н | |||
| и др | |||
| Гироскопическое ориентирование | |||
| - П.: Недра, 1480, с | |||
| СЧЕТНЫЙ ДИСК ДЛЯ РАСЧЕТА СОСТАВНЫХ ЧАСТЕЙ ПИЩИ | 1919 |
|
SU284A1 |
