Изобретение относится к приборостроению и может быть использовано при измерении азимута ориентнрных направлений начемпыми гирокомпасами с управляемым чувствительным элементом.
Целью изобретение является повышение точности определения азимута компенсационным способом за счет устранения опнбок от вредных моментов и нестабильности управляющего момента. На чертеже изображена схема yfnos ориентирования корпуса гирокомпаса. Способ заключается в следующем. Чувствительный элемент (ЧЭ) согласовывают с корпусом прибора, измеряют длительности импульсов управляющего момента в режиме установившихся незатухающих колебаний ЧЭ около согласованного положения и по соотношению длительностей импульсов противоположного знака судят об азимуте.
При этом выражение для вычисления азимута может быть представлено в следующем виде:
М Tj.- Т
т.
. : j
rv - ц т
A1 TITI T L
ни
г + т,
(1)
м н
где с. азимут (угол рассогласования прибора с плоскостью меридиана);
-величина управляющего момента;
-кинетический момент;
Ur - горизонтальная составляющая VI повои скорости вращения Земли;
Т и Т2 - длительности импульсов управляющего момента.
Однако при том имеет место ошибка определения азимута из-за нестабильности и несиммртрни величины управлк- юг его момента, а также от вредных моментов, с-бусловленных несовершенст0
ьэ го
sj
о
вом подвеса ЧЭ, магнитным взаимодействием Ч с постоянными и переменными виемиими магнитными полями, смещением центра тяжести гпромотора и т.д. Зависимость перечисленных моментов от широты места установки прибора и условий эксплуатации не позволяет учитывать соответствующие им погрешности в качестве формулярной поправки прибора.
Запишем уравнение средних значений компенсационных моментов перти- кальной осп чувствительного элемента:
М
- Мияпр + ер
.«° ч°
gnp, г иагр
и И
6F
средние зьс1 ; .лия .чющьго, на- правляющег и вредного моментов соот не гственно.
М
HOt p
HU . sintf..
Среднее значение управляющего .момента Мирр с нестабильности уп- равняющего момента может быть вьфа- жено через- длительноетч импульсов упр-пч. по дего момента Т и Тл слеггу- образом:
,,о ...., Н , TV Т, Н1 - -р тГТ-т,
М
где -t - относительная нестабильность управляющего момента. Тогда равенство (2) мог-гт быть записно в виде
и(.-Г-Ц
Ii т
zi-i (
ii
РР
(3)
1-пн дня -1алых угпов ;. 0
н То - ТУ
м(1 - }) т--т-,г ниг(хв
2.
Мер Отсюда, обозначая nfj
получаем
Ги
4-(( +ЛИ1+
Ич (4) видно, 1 нычН ли. 1 гп угон
ITO Лпктическ.г но
((0 + U4) с относительной погрешностью
ii м
, т.е. угол
рассогласования с положением, в ром HU г 0(0 М вр и параметры Т тГе.
хото и Т
симметричны, т:е. равны по величине.
При этом погрешность определения азимута в соответствии с (4) равна
oi0 Д + (ot + Д) $ .
(5)
:
5
20
25
30
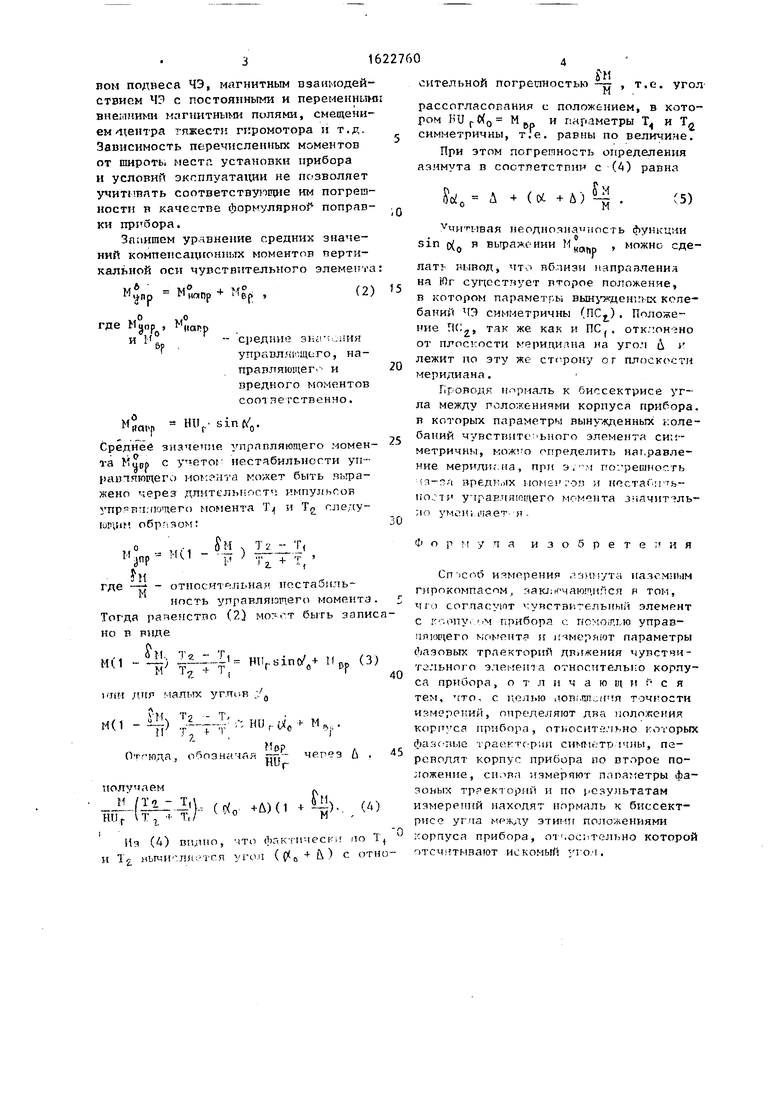
учитч вая неоднозначность функции sin о(0 в выражении Ми , можно сделать вывод, что вбпиэи направления на Юг супесттчует второе положение, в котором параметры вьшукценпих колебаний ЧЭ симметричны (ПС). Положение П(;, так же как и ПС(, отклонено от плоскости меридиана на yro. i Д г лежит по эту же сторону о г плоскости меридиана.
Г.говодя нормаль к биссектрисе угла между положениями корпуса прибора, в которых параметры вынужденных колебаний чувствите ьного элемента симметричны, можго определить накравле- ние мерид1 ;иа, при погрешность ,х помай гол и ностаГ.Г ь- iio т и у-1рарт ятщего момента зчячит ль- ;ю умон; 11;ает я .
Ф о р
па изобретения
40
45
Сп ICOD ичморения . ч 1пута назгм-1ЫМ гирокомпасом, зяк/и чакип.нйся и том, чю согпасуют чувствительный элемент с Г -.оиу. г,м ппибора е пс чо,г,1.ю управ- пяюп;его момента и 1 ямеряют параметры Лаэовых траекторий чувстчи- ТчЗ.чьного элрмртл относительно корпуса прибора, о т л и ч а ю щ и с я тем, ггто- с целью .ювг. тэчгости измерений, определяют два положения корпуса прибора, отьоситйльно которых фазовые чраокторни чны, переводят корпус прибора по второе положение, снова измеряют параметры фа- зоных траекторий и по результатам измерений находят нормаль к биссектрис угаа MPwy этими положениями корпуса прибора, от .оегтельно которой отсчитывают искомый угоа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гирокомпас | 1981 |
|
SU1559844A1 |
| Способ определения направления меридиана гирокомпасом | 1978 |
|
SU1602141A1 |
| Гирокомпас | 1982 |
|
SU1559842A1 |
| Способ определения плоскости меридиана гирокомпасом | 1980 |
|
SU1583742A1 |
| Способ приведения чувствительного элемента гирокомпаса в плоскость меридиана | 1972 |
|
SU449239A1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2241957C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА МАЯТНИКОВОГО ТРЕХСТЕПЕННОГО ГИРОКОМПАСА | 1970 |
|
SU288321A1 |
| ГИРОКОМПАС | 2015 |
|
RU2611575C1 |
| Угломерное устройство для наземного гирокомпаса | 1975 |
|
SU522413A1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
Изобретение относится г приборостроению и может ытт, иснолътовано при измерении азимута ориентнрных направлений наземными гирокомпасами с управляемым чувствительным элементом. Пелыо изобретения является повышение годности определения азимута компенсапионнпм способом за счет устранения ошибок от вредных моментов и нестабильности управляющего момента. Лля этого находят два положения корпуса прибора, при которых парамс-т- пы фазовых траектории движения вителшого элемента относительно корпуса прибора симметричны, а азимут определяют как нормаль к биссектрисе угла между положениями корпуса прибора. ил.
| Машина для завертывания карамели | 1931 |
|
SU28832A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
