Изобретение относится к точному приборостроению, а именно к гирокомпасам, и может быть использовано в маркшейдерском деле, при строительстве метро и туннелей, при топогеодезичес- кой подготовке местности.
Цель изобретения - повышение точности определения плоскости меридиана путем исключения погрешности от дрейфа систематического вреднего момента.
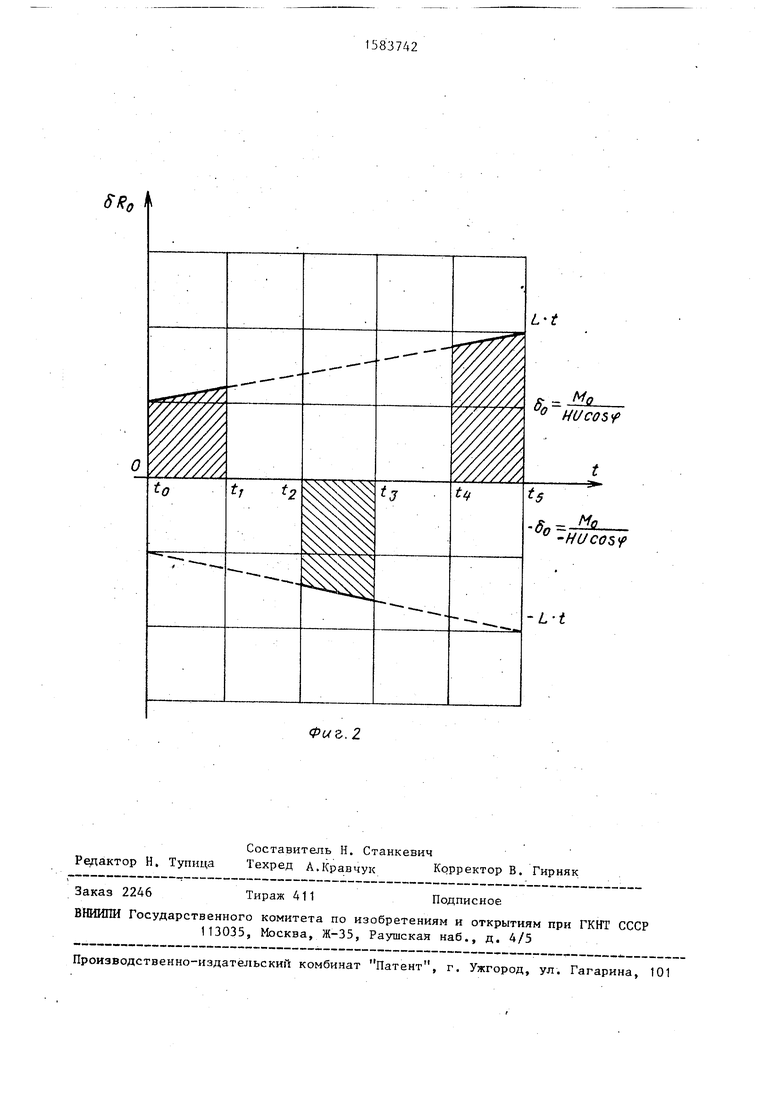
На фиг о 1 показан автоматический гирокомпас, используемый для осуществления способа; на фиг. 2 - график изменения погрешностей определений положений устойчивого и неустойчивого равновесия чувствительного элемента.
Автоматический гирокомпас содержит чувствительный элемент t, механизм 2 арретирования, систему отслеживания с автоколлимационным датчиком 3 положения, усилителем 4, исполнительным -двигателем 5, пульт 6 управления, связанный с усилителем 4, датчик 7 угол - код выходного угла,связанный с вычислительным устройством 8, систему демпфирования, состоящую из последовательно соединенных управляющего устройства 9, вход которого подключен к выходу усилителя 4, и датчик 10 момента между следящим корпусом 11 и чувствительным элементом 1.
Способ осуществляют следующим образом.
СП
00 СО 1 4ь ГС
После разарретирования чувствительного элемента 1 механизмом 2 арретир ования система демпфирования обеспечивает формирование требуемых начальных условий движения чувствительного элемента 1„ Для ориентации чувствительного элемента в направление на север (вблизи устойчивого положения равновесия) или на юг (вблизи неустойчивого) служит двигатель 5, разворачивающий следящий корпус 11 по Информации с датчика -7 угол - код выходного угла. Система отслеживания от15837424
из устойчивого (неустойчивого) в неустойчивое (устойчивое) положение.
Если угол между началом отсчетной системы гирокомпаса и направлением плоскости меридиана определять в соответствии с выражением
10
К0 | R1+2R2+R3+ sign(R7-Rt)- -frsign(R2-R3) ,(2)
то погрешность, вызванная дрейфом систематического вреднего момента,
К0 | R1+2R2+R3+ sign(R7-Rt)- -frsign(R2-R3) ,(2)
то погрешность, вызванная дрейфом систематического вреднего момента,
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения направления меридиана гирокомпасом | 1978 |
|
SU1602141A1 |
| Гирокомпас | 1981 |
|
SU1559844A1 |
| Гирокомпас | 1982 |
|
SU1559842A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА | 2014 |
|
RU2567406C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА | 2015 |
|
RU2617141C1 |
| Способ измерения азимута наземным гирокомпасом | 1979 |
|
SU1622760A1 |
| Способ определения азимута | 2020 |
|
RU2738098C1 |
| ГИРОАЗИМУТКОМПАС С АВТОМАТИЧЕСКОЙ ВЫРАБОТКОЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2470260C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Способ приведения чувствительного элемента гирокомпаса в плоскость меридиана | 1972 |
|
SU449239A1 |

Изобретение относится к точному приборостроению и может быть использовано в маркшейдерском деле, при строительстве метро и туннелей, при топографической подготовке местности. Целью изобретения является повышение точности определения меридиана. Для исключения погрешности, вызванной дрейфом систематического вредного момента, определяют вначале положения устойчивого положения прецессионного движения чувствительного элемента, затем - неустойчивого положения и снова устойчивого положения, причем все положения равновесной находят за фиксированные времена времени и через равные промежутки между измерениями. По результатам измерений определяют положение плоскости меридиана без ошибки, вызванной дрейфом систематического вредного момента. 2 ил.
слеживает за движением чувствительно- , отсутствует.
го элемента- 1 , а информация с датчи- Действительно , среднее значение
погрешностей определения положений
Kj и неустойчивого R
20
ка 7 угол - код выходного угла передается в вычислительное устройство 8
На графике (фиг. 2) иллюстрируется изменение погрешностей определений положений устойчивого и неустойчивого равновесия чувствительного элемента из-за наличия дрейфа систематического вредного момента. На графике Ucos (f - горизонтальная составляющая 25 Скорости вращения Земли в точке установки прибора; ol угол отклонения от положения устойчивого (неустойчивого) равновесия; L - скорость дрейфа систематического вредного момента.
Дрейф показаний прибора при работе вблизи положений устойчивого и неустойчивого равновесия изменяется по закону
устойчивого R(,
равновесия на интервалах наблюдений
V.
W
t5-t,j равняются
30
R, /U L/2(tf-to), «/IR1 -JJ-L/2(t3-t2), сЛЦ c/l0+L/2(trt4).
Тогда погрешность определения плоскости меридиана, т.е. погрешность определения угла между началом отсчетной системы гирокомпаса и направлением плоскости меридиана cTRe, по формуле (2) составляет
. Ue((trt)+2t-e(I«- (t)
1,
R,R0+«P,+ L(tl-t0),
R1 R0+{Tsign(RT-Ri)-cPd-Os5L(t3-t0)- -L(tt.-t.),
35
R ()() +
40
1
где
+ (t4-t0)+
Mo
(1)
чЧ | (ty-t4)J. Нетрудно видеть, что погрешность при фиксированных временах наблюдений t1-t| t -t 5-t и равных промежутках времени между измерениями устойчивого и неустойчивого положений равновесий t ft 4-t равняется нулю. Следовательно, погрешность
попределения плоскости меридиана из-за
° HUcos iF постоякная состав- 45 дрейфа систематического вредного мо- ляющая погрешности; мента при вычислении последнего в соответствии с выражением (2) исключается. Формула изобретения
Способ определения плотности меридиана гирокомпасом, заключающийся в определении устойчивого и неустойчивого положения равновесия чувствительного элемента, отличающий- с я тем, что, с целью повышения точности, повторно определяют устойчивое положение равновесия, при этом все положения равновесий находят за фиксированные времена наблюдений и через
R
1
М - постоянная составО
ляющая вредного момента; R - положения устойчи- 50
вого равновесия;: R - положение неустойчивого равновесия. Интервалы времени t.,-te; tj-tjj tj-t4 являются интервалами наблюде- 55 ний за движением СЭ вблизи положений равновесия, а в интервалах времени tfc-t,; t4-tз производится переориентация вектора кинетического момента
Kj и неустойчивого R
устойчивого R(,
равновесия на интервалах наблюдений
V.
W
t5-t,j равняются
R, /U L/2(tf-to), «/IR1 -JJ-L/2(t3-t2), сЛЦ c/l0+L/2(trt4).
Тогда погрешность определения плоскости меридиана, т.е. погрешность определения угла между началом отсчетной системы гирокомпаса и направлением плоскости меридиана cTRe, по формуле (2) составляет
. Ue((trt)+2t-e(I«- (t)4
51583742
равные промежутки времени между наб-R1
людениями, а плоскость меридиана определяют в-соответствии с выражением
RO | R1+2Rt+RJ+ sign(R1-Rl) - lTsign(Rt-R3)J,
где R - УГОЛ между началом отсчетнои ° системы гирокомпаса и направ-10 лением плоскости меридиана;
R - угол между началом отсчетнои системы гирокомпаса и устойчивым положением равновесия соответственно при первом и втором наблюдениях;
Rr угол между началом отсчет-г ной системы гирокомпаса и неустойчивым положением равновесия.
О
to
2
Фиг. 2
0 HU COS
tit
ts
COS f
| Патент СЫА № 3231984, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
