Изобретение относится к приборостроению и может быть использовано для определения плоскости меридиана наземными маятниковыми гироком- пасами.
Цель изобретения - повышение точности гирокомпаса.
На чертеже показана функциональная схема гирокомпаса
Гирокомпас содержит чувствительный элемент 1 с гиромотором 2, систему отслеживания, состоящую из последовательно соединенных автоколлимационного фотодатчика 3, усили- теля 4 и двигателя 5, арретир 6 с концевым выключателем и кодовый датчик угла 7. Все эти элементы соединены с блоком команд 8. Кодовый датчик угла 7 вторым выходом соединен с блоком усреднения отсчетов 9. Ги - рокомпас, кроме того, содержит блок 10 ввода постоянных гирокомпаса, блок 1 1 итеррационных вычислений коэффициентов, блок 12 тригонометриче- ской интерполяции траектории прецессии и блок 13 вычисления параметров траектории прецессии, которые последовательно соединены между собой, а также запоминающее устрой- ство 14 (выполнено в виде регистров памяти), блок коммутации 15, программно-временное устройство 16 (выполнено в виде механических реле, электронных реле времени и устройств задержки), блок 17 анализа амплитуды выполнен в виде пороговых схем), сумматор 18, блок 19 вычисления констант, блок умножения 20, блок 21 уточнения периода прецессии (выпол- нен в виде сумматора и входных и выходных устройств) и блок 22 преобразования и индикации азимута.
Данная схема гирокомпаса ислоль- зует методику уточнения периода пре- цессионных колебаний о Для пояснения принципа действия гирокомпаса рассмотрим погрешности от неточного задания периода и метод ее исключения .
Дифференциальное уравнение движения чувствительного элемента (ЧЭ) ги рокомпаса с достаточной для практики точностью следующее:
tf+C00Oi 0, (1)
где Сб - угол отклонения 43 от положения динамического равновесия его крутильных колебаний;
($й круговая частоте прецессионных колебаний (G)0 ZlfTph, ТПр период прецессионных колебаний).
Решение дифференциального уравнения (1) имеет вид
06(t) cio sinu)0t + c 0cosC00t, (2)
где cw ci0 /С0„,
c2o Qi0 - постоянные интегриро- ,вания/
0А , о/ - начальные скорости
и отклонение ЧЭ„
В отчетной системе кодового датчика угла уравнение запишется в виде
tfkAy(t) R0 + c(0sinC00t +
+ ctocosQ0t,
(3)
где RQ - положение динамического равновесия крутильных колебаний .ЧЭ в отчетной системе гирокомпаса.
Из выражения (3) вид но, «то погрешность определения положения динамического равновесия крутильных колеба ний ДР из-за неточности ввода частоты (периода) прецессионных колебаний d СО будет
Ао . .ft0 COS4-V 0 4sin -
A
d(D fr CO
4sin
cos(q - ft),
(4)
где -А - амплитуда прецессионных
колебаний}
dfi) - погрешность задания частоты прецессионных колебаний; fto Q0At,
,J,
03, - вычисленные значения параметров )0 h, с учетом ошибки задания Cu(dQ) ); ut - дискретность съема информации .
Вычисленное значение положения динамического равновесия крутильных колебаний гирокомпаса R будет состоять из истинного значения погрешности fiR, т.е.
R.
и
R,
&R,
(5)
D155984
Вводя два цикла измерений, отстоящих друг от друга на время Ј , можно составить систему алгебраических уравнений относительно неизвестных R и dW:5
г, . dGJ R + А-ГГ
СО , . i fl Asm -тг
соз(С|) -fl),
R +A
du) fl О)
4 sin
2
cos(Cf- fl +
+&(f).
Здесь &CJ 60S.
Решая систему (6), получим
, 2sin -
d6)-CiXRt -R2)
(4
ЛЦ
Aftsin-y-sin( +Л(
На реализации зависимости (7) и основан путь повышения точности гирокомпаса.
Гирокомпас работает следующим образом.
После разгона гиромотора 2 и раз- арретирования чувствительного элемента 1 арретиром 6 система отслеживания при помощи автоколлимационного фотодатчика 3 отслеживает за ЧЭ 1, вращая при этом и кодовый датчик угла 7 двигателем 5. Вся инфомация о состоянии элементов и узлов гирокомпаса (например, разогнан ли гиромотор и т«д) поступает на блок команд 8, который, оценивая состояние, выдает команду на подключение того или иного элемент или узла. Сигнал с кодового датчика угла 7 поступает на блок усреднения отсчето 9, где происходит усреднение сигнала на периоде наложенных колебаний. В дальнейшем сигнал с кодового датчика угла 7 через запоминающее устройство 14 и блок коммутации 15 поступает на блок 12 тригометриче- ской интерполяции траектории прецессии, на второй вход которого поступает сигнал, из последовательно соединенных блока 10 ввода постоянных и блока 11 итеррационных вычислений коэффициентов. Выход блока 12 тригонометрической интерполяции траектории прецессии соединен с входом блока 13 ВЫЧИСЛРНИЯ параметров траектории прецессии, в котором путем минимизации среднеквадратической
оянорав5
),
+
10
6)
(4}
15
20
ошибки апроксимирующей траектории прецессии находят положение динамического равновесия R и амплитуду А.
Программно-временное устройство 16 (выполнено на базе реле времени) задает времена набора информации (количество усредненных отсчетов) соответственно в первом цикле (Т) и во втором (т,,) t а также время между двумя циклами Ј ; в блоках 10-13 происходит вычисление положений динамического равновесия R и Р ( и 2-й циклы), которые из-за временной сдвижки ь будут иметь существенно различную начальную форму колебаний ьср.
Для реализации (7) в гирокомпасе сумматор 18 вычисляет R - RЈ, блок 19 вычисления констант
А sin
2 sin Щ
2 2
sin(q -fl +ДЦ)
0
5
0
5
0
5
а блок умножения 20 - dCO.
Блок 17 анализа амплитуды оценивает величину амплитуды Аи, если она лежит не в 3,5-6,5 , через блок команд 8 арретирует ЧЭ 1 через арретир 6 и разворачивает в направление к плоскости меридиана (если амплитуда ,5°) или от плоскости меридиана (если , ). При этом блок команд 8 выдает на усилитель А системы отслеживания сигнал соответствующей полярности, величина которого зависит от величины угла разворота ( при подходе к заданному отсчету величина сигнала падает, что повышает точность разворота) .
Оценивать величину амплитуды необходимо по следующим соображениям. Из (7) видно, что числитель выражения малая величина (R - R/jO - 0 ив случае, если А - 0 при делении малого на малое приведет к большой погрешности-определения dCG,,5 ). С другой стороны, увеличение амплитуды А прецессии приводит к увеличению скорости движения ЧЭ, а следовательно, возрастает динамическая ошибка слежения и ошибка съема отсчетов (,5 ).
В случае, если 6,5 ,5 , в
блоке умножения 20 вычисляется ddJ. Блок 21 уточнения периода прецессии оценивает разность между вычисленными значениями R4 и R и, если она меньше ошибок вычисления ( угл .с.) выдает в гблок 22 преобразования и индикации азимута значение R, если разность R, - Побольше 1 угл.с., вычисленное значение dСО суммируется со значением СО,, хранимой в блоке ввода постоянных, а программно-временное устройство 16 вновь запускает обсчет параметров траектории прецессии (блоки 10-13), используя усредненные отсчеты, записанные в запоминающем устройстве 14.
Формула изобретения
Гирокомпас, содержащий маятниковый чувствительный элемент с гиро- мотором, систему отслеживания, включающую последовательно соединенные автоколлимационный фотодатчик, усилитель и двигатель, датчик угол - код, первый выход которого соединен с входом блока команд, выход которого связан с входом арретира с концевым выключателем, второй выход датчика угол - код соединен с входом блока усреднения отсчетов, последовательно соединенные блок ввода постоянных гирокомпаса, блок итерра- ционных вычислений коэффициентов, блок тригонометрической интерполяции траектории прецессии и блок вычисления параметров траектории прецессии, отличающийся тем,
,
5598428
что, с целью йовышения точности гирокомпаса, в него введены программно-временное устройство и сумматор, I . последовательно соединенные запоминающее устройство и блок коммутации, последовательно соединенные блок вычисления констант и блок анализа амплитуды прецессии, последовательJQ но соединенные блок умножения, блок уточнения периода прецессии и блок преобразования и индикации азимута, причем первый выход блока вычисления параметров траектории прецессии
15 соединен с входом сумматора, выход которого соединен с первым входом блока умножения, вторые выходы блока вычисления констант и блока ввода постоянных гирокомпаса соединены со2о ответственно со вторым и третьим входами блока умножения, второй и третий выходы блока уточнения периода прецессии соединены соответственно с входом блока ввода постоянных
25 гирокомпаса и первым входом программно-временного устройства, со вторые входом которого соединен второй выход блока команд, при этом выход блока анализа амплитуды прецессии
30 соединен со вторым входом блока команд, второй выход блока вычисления параметров траектории прецессии соединен со вторым входом блока анализа амплитуды прецессии, а выход
35 блока усреднения отсчетов соединен
со входом запоминающего устройства.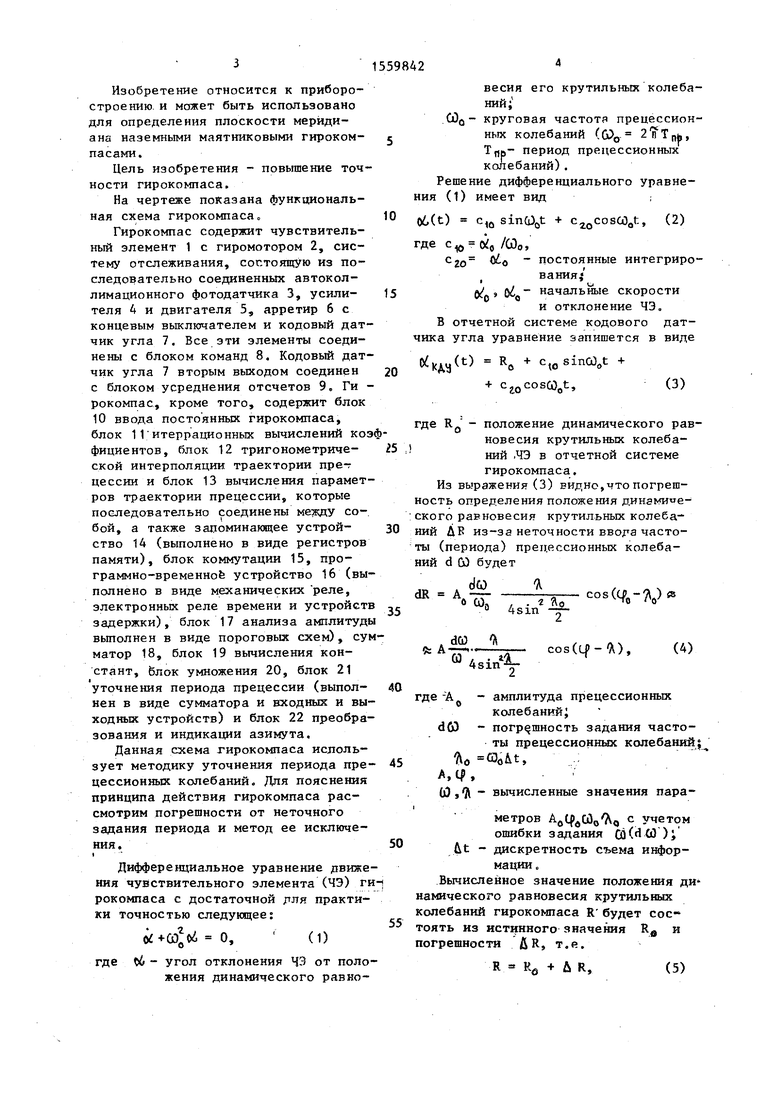
| название | год | авторы | номер документа |
|---|---|---|---|
| Гирокомпас | 1981 |
|
SU1559844A1 |
| Способ определения направления меридиана гирокомпасом | 1978 |
|
SU1602141A1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ОСИ РОТОРА ГИРОМОТОРА В ГИРОКОМПАСЕ ОТНОСИТЕЛЬНО АСТРОНОМИЧЕСКОГО | 1973 |
|
SU361393A1 |
| Автоматический наземный гирокомпас | 1979 |
|
SU808847A1 |
| Устройство для определения моментов газостатических опор | 1987 |
|
SU1525491A2 |
| Устройство для моделирования выходных сигналов гирокомпаса | 1977 |
|
SU741287A1 |
| СПОСОБ УМЕНЬШЕНИЯ АМПЛИТУДЫ ПРЕЦЕССИОННЫХ КОЛЕБАНИЙ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИРОКОМПАСА | 1988 |
|
RU2025663C1 |
| Наземный гирокомпас | 1976 |
|
SU550862A1 |
| Способ определения плоскости меридиана гирокомпасом | 1980 |
|
SU1583742A1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
Изобретение относится к приборостроению и может быть использовано для определения плоскости меридиана наземными маятниковыми гирокомпасами. Цель изобретения - повышение точности гирокомпаса. Повышение точности достигается устранением погрешности, вызванной нестабильностью частоты прецессионных колебаний, которая определяется путем организации двух циклов измерений и рассчитывается по алгоритму реализуемых функциональными блоками 18 (сумматор) 19 (блок вычисления констант) и 20 (блок умножения). 1 ил.