Фиг.2
Изобретение относится к промышленному транспорту, а именно к горизонтально- замкнутому конвейеру.
Цель изобретения - уменьшение габаритов конвейера путем уменьшения радиуса поворотных участков.
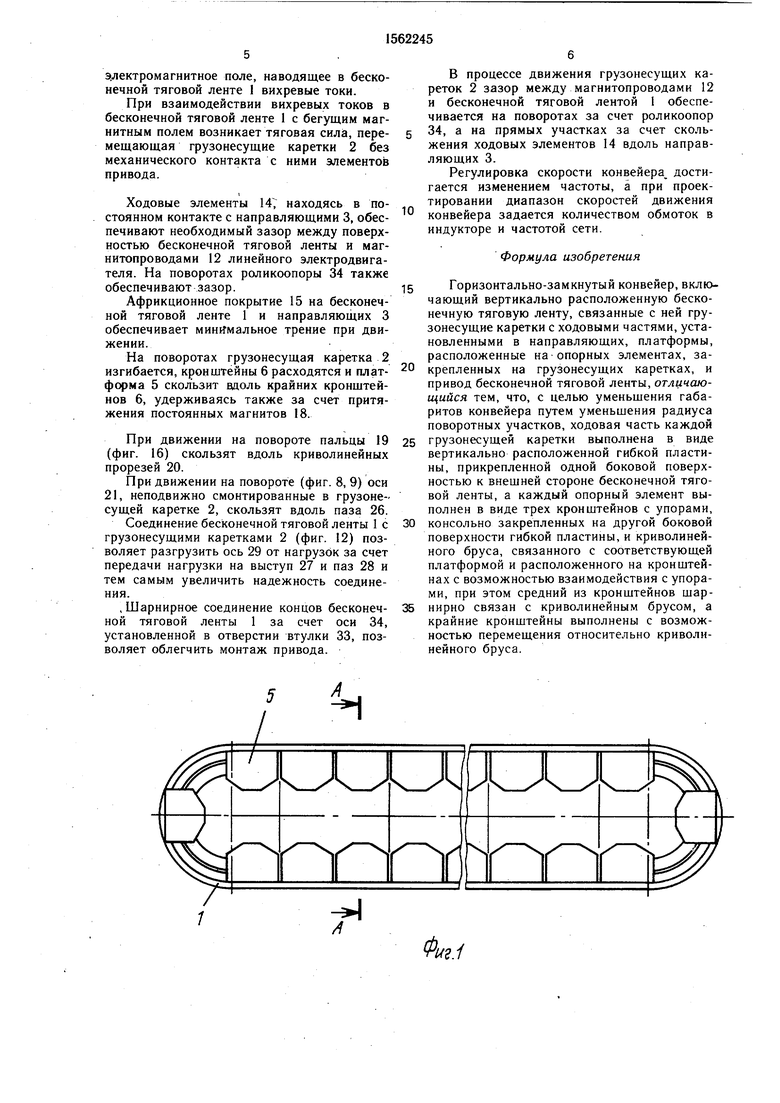
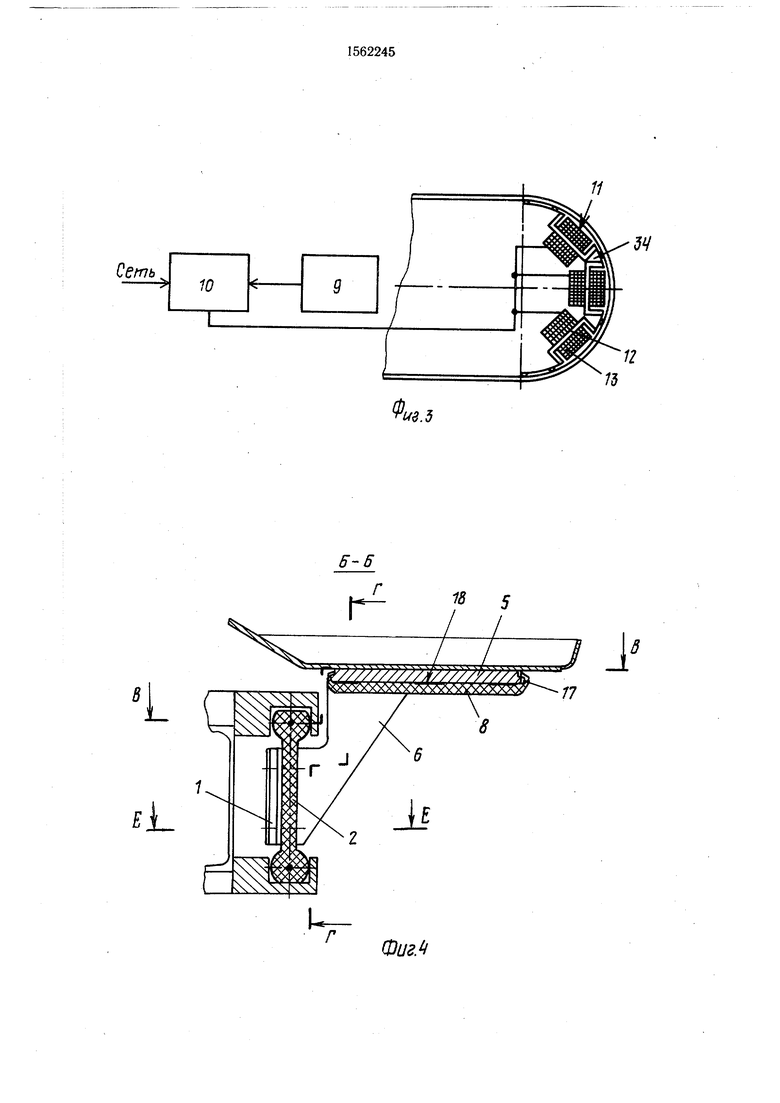
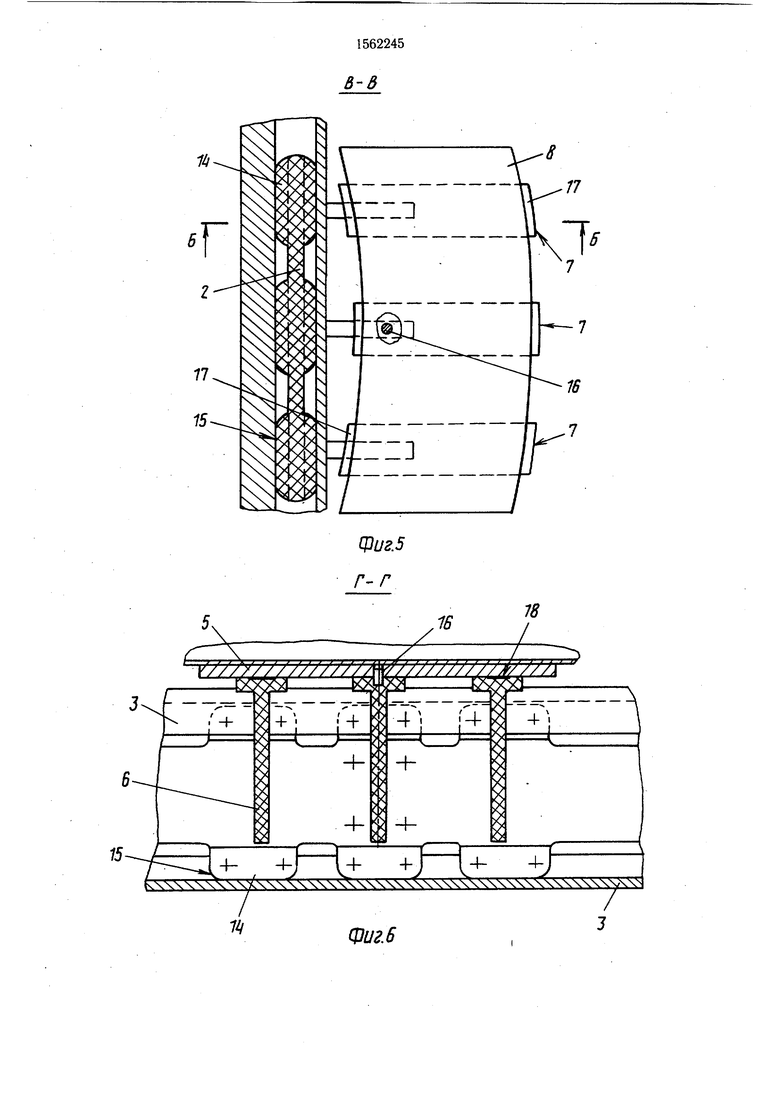
На фиг. 1 показан конвейер, вид сверху; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - привод конвейера с односторонним индуктором; на фиг. 4 - разрез Б-Б на фиг. 5; на фиг. 5 - разрез В-В на фиг. 4; на фиг. 6 - разрез Г-Г на фиг. 4; на фиг. 7 - конструкция направляющих для движения кронштейнов каретки относительно платформы; на фиг. 8 - каретка с шарнир- но установленными кронштейнами, поперечный разрез; на фиг. 9 - разрез Д-Д на фиг. 8; на фиг. 10 - бесконечная тяговая лента, поперечное сечение; на фиг. 11 - конструкция составной бесконечной тяговой ленты; на фиг. 12 - сечение Е-Е на фиг. 4; на фиг. 13 - конструкция шарнирного соединения концов бесконечной тяговой ленты; на фиг. 14 - вид Ж на фиг. 13; на фиг. 15 - вариант крепления платформы к каретке; на фиг. 16 - то же, вид сверху.
Горизонтально-замкнутый конвейер включает гибкую бесконечную тяговую ленту 1 со связанными с ней грузонесущими каретками 2, ходовые части которых выполнены в виде размещенных в направляющих 3 вертикально расположенных гибких пластин 4, прикрепленных к внешней стороне бесконечной тяговой ленты, платформы 5, расположенные на опорных элементах, закрепленных на грузонесущих каретках 2 и привод бесконечной тяговой ленты 1.
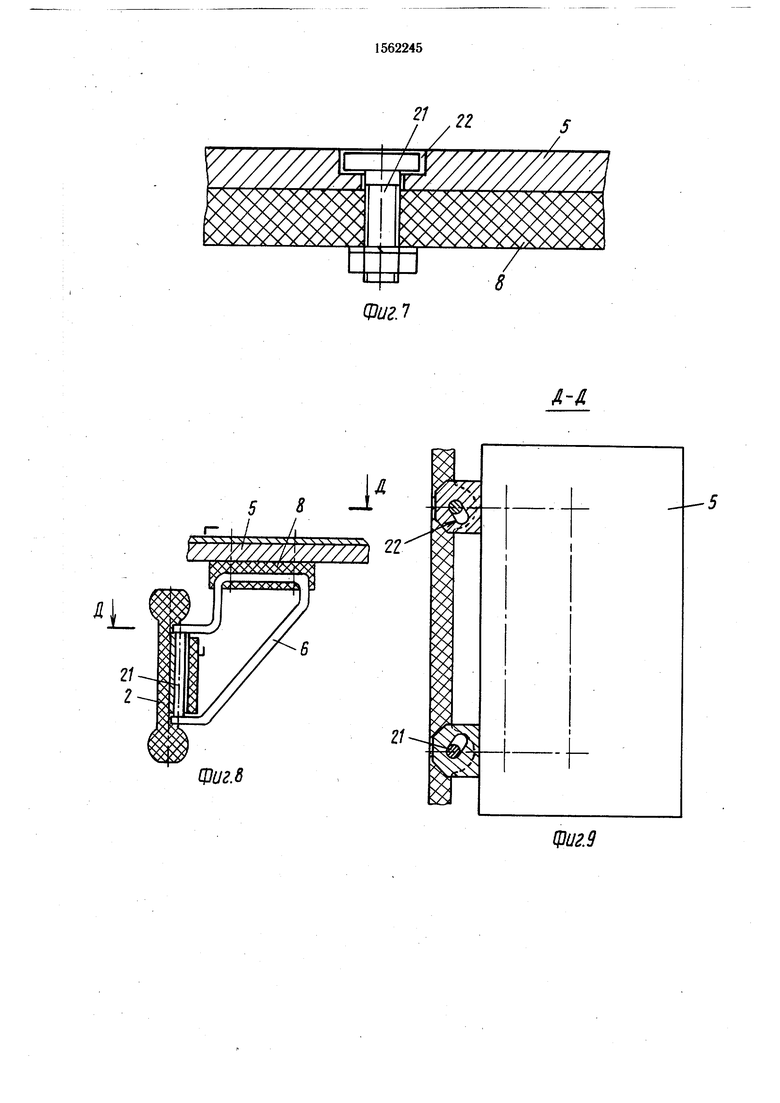
Каждый опорный элемент выполнен в ви- дее трех кронштейнов 6 с упорами 7, кон- сольно закрепленных на внешней боковой поверхности гибкой пластины 4 и криволинейного бруса 8, связанного с платформой и расположенного на кронштейнах 6 с возможностью взаимодействия с упорами 7. При этом средний из кронштейнов 6 связан с криволинейным брусом 8, а крайние кронштейны 6 выполнены с возможностью перемещения относительно криволинейного бруса 8.
Бесконечная тяговая лента 1 обладает ферромагнитными свойствами и является вторичным элементом привода, представляющего собой асинхронный линейный электродвигатель с блоком 9 управления и коммутатором 10. Первичный элемент линейного электродвигателя - индуктор 11 выполнен из установленных на отдельных участках вдоль направляющих 3 магнитопро- чидов 12 с уложенными в них электрическими обмотками 13.
Каждая гибкая пластина 4 грузонесущей каретки 2 выполнена из полимерного материала с армирующими деталями и имеет
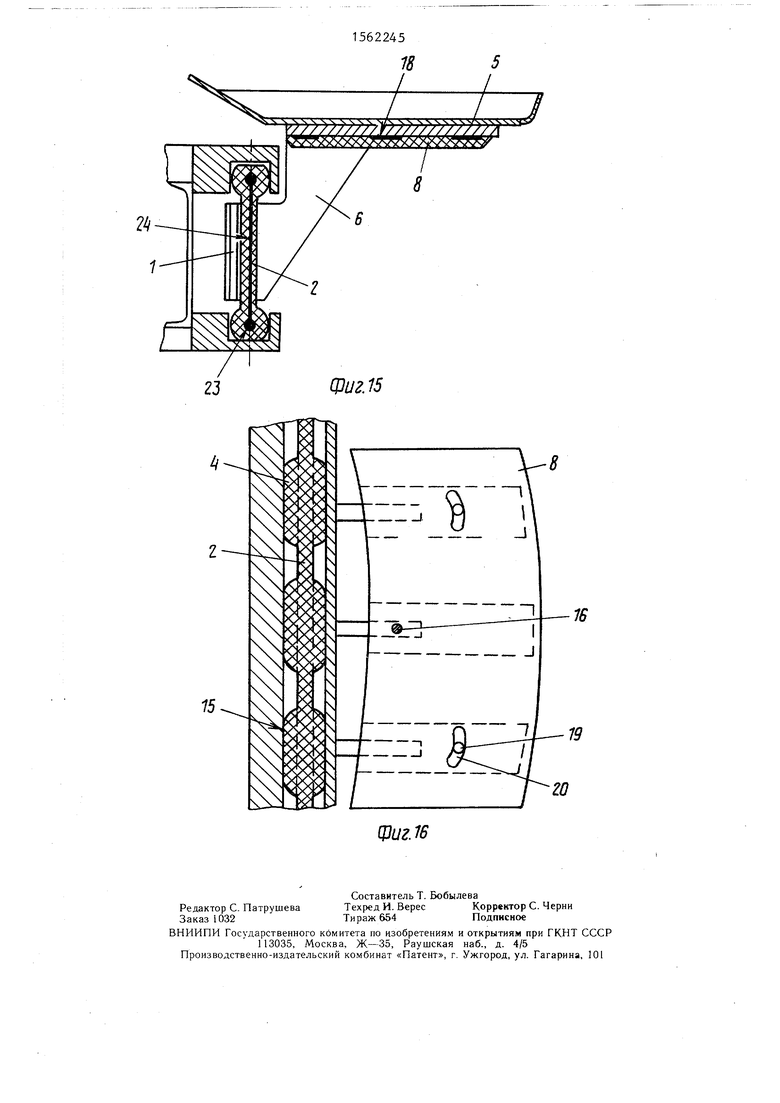
ходовые элементы 14, на которые нанесено антифрикционное покрытие 15.
Для уменьшения радиусных участков конвейера криволинейный брус 8 соединен со
средним кронштейном 6 шарниром 16 (фиг. 5, 16), крайние же кронштейны 6 имеют возможность скольжения относительно криволинейного бруса 8 при изгибе гибких пластин 4 на криволинейных участках трассы конвейера.
Упоры 7 для удержания платформы 5 относительно криволинейного бруса 8 могут быть выполнены в виде отбортовок 17 на кронштейнах 6 (фиг. 4, 5). При другом варианте выполнения удержание платформ 5
может осуществляться посредством магнитов 18, закрепленных на криволинейном брусе 8, при этом функцию отбортовок выполняют закрепленные на кронштейнах 6 пальцы 19, расположенные в криволинейп ных прорезях 20, выполненных в криволинейном брусе 8 (фиг. 7, 16).
В стенке бесконечной тяговой ленты 1 смонтированы оси 21, которые устанавливаются в пазах 22 кронштейнов 6 (фиг. 8, 5 9). Причем пазы 22 выполнены по траектории движения осей 21 во время изгиба бесконечной тяговой ленты на повороте трассы.
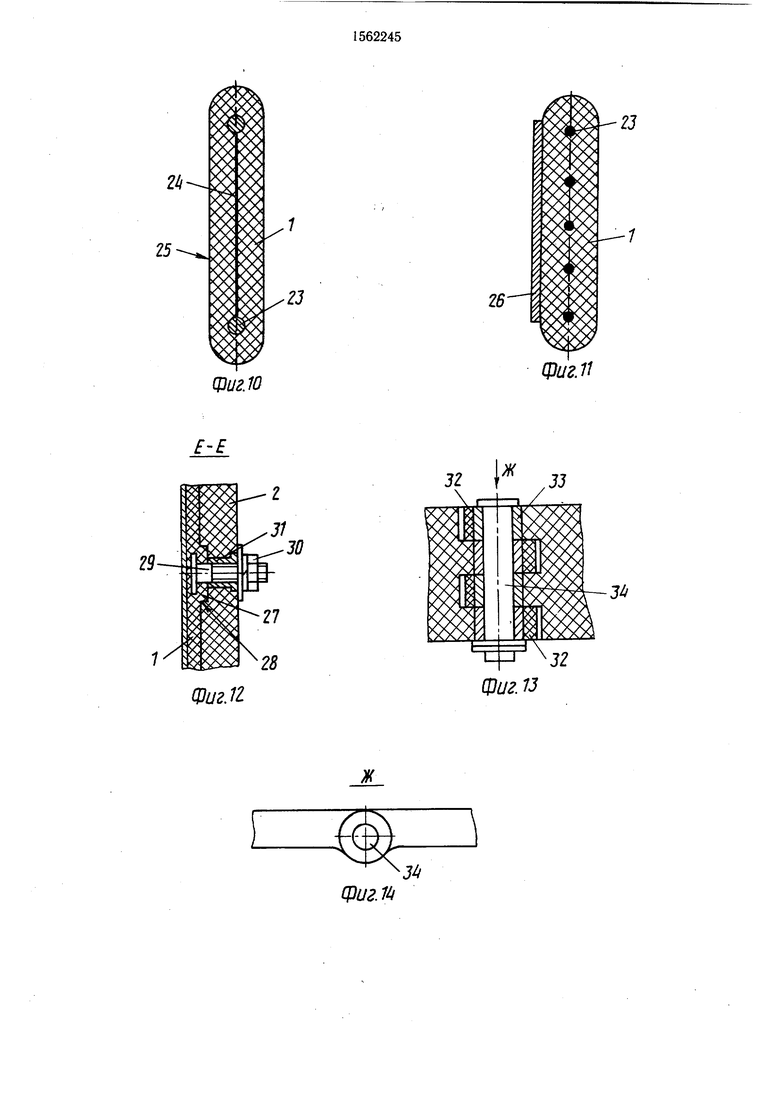
Бесконечная тяговая лента 1 состоит из двух тросов 23 и металлической гибкой ленты 24, заармированных в полимерном мате- риале. Бесконечная тяговая лента 1 имеет электропроводное покрытие 25.
Вместо электропроводного покрытия может быть применена тонкая гибкая электропроводная лента 26 (фиг. 11), которая неразъемно соединена с бесконечной тяговой лентой 1 из полимерного материала.
Пример соединения бесконечной тяговой ленты 1 с грузонесущими каретками 2 показан на фиг. 12.
Выступ 27 заходит в паз 28, выпол- 0 ненный в грузонесущей каретке 2 и крепится к ней в двух или более местах осями 29, которые заармированы в бесконечной тяговой ленте. Соединение затянуто гайкой 30. Для увеличения нагрузочной способности под оси 29 в грузонесущей каретке 2 заар- 5 мированы втулки 31..
Конструкция шарнирного соединения концов бесконечной тяговой ленты 1 показана на фиг. 13 и 14. Каждая из соединяемых сторон имеет по две закруглен- ные бобышки 32 с заармированными втулками 33, соединенными осью 34.
На поворотах трассы установлены опоры, например роликоопоры 34 (фиг. 3).
Конвейер монтируется на ставе 35.
Конвейер работает следующим образом. 5 По сигналу с блока 9 управления электромагнитного привода коммутатор 10 поочередно подключает электрические обмотки 13 индуктора 11, в котором возникает бегущее
5
электромагнитное поле, наводящее в бесконечной тяговой ленте 1 вихревые токи.
При взаимодействии вихревых токов в бесконечной тяговой ленте 1 с бегущим магнитным полем возникает тяговая сила, перемещающая грузонесущие каретки 2 без механического контакта с ними элементов привода.
Ходовые элементы 147 находясь в постоянном контакте с направляющими 3, обеспечивают необходимый зазор между поверхностью бесконечной тяговой ленты и маг- нитопроводами 12 линейного электродвигателя. На поворотах роликоопоры 34 также обеспечивают зазор.
Африкционное покрытие 15 на бесконечной тяговой ленте 1 и направляющих 3 обеспечивает минимальное трение при движении.
На поворотах грузонесущая каретка 2 изгибается, кронштейны 6 расходятся и плат- форма 5 скользит вдоль крайних кронштейнов 6, удерживаясь также за счет притяжения постоянных магнитов 18.
При движении на повороте пальцы 19 (фиг. 16) скользят вдоль криволинейных прорезей 20.
При движении на повороте (фиг. 8, 9) оси 21, неподвижно смонтированные в грузоне- сущей каретке 2, скользят вдоль паза 26.
Соединение бесконечной тяговой ленты 1 с грузонесущими каретками 2 (фиг. 12) позволяет разгрузить ось 29 от нагрузок за счет передачи нагрузки на выступ 27 и паз 28 и тем самым увеличить надежность соединения.
, Шарнирное соединение концов бесконеч- ной тяговой ленты 1 за счет оси 34, установленной в отверстии втулки 33, позволяет облегчить монтаж привода.
0
5
0
5
0
5
В процессе движения грузонесущих кареток 2 зазор между магнитопроводами 12 и бесконечной тяговой лентой 1 обеспечивается на поворотах за счет роликоопор 34, а на прямых участках за счет скольжения ходовых элементов 14 вдоль направляющих 3.
Регулировка скорости конвейера достигается изменением частоты, а при проектировании диапазон скоростей движения конвейера задается количеством обмоток в индукторе и частотой сети
Формула изобретения
Горизонтально-замкнутый конвейер, включающий вертикально расположенную бесконечную тяговую ленту, связанные с ней грузонесущие каретки с ходовыми частями, установленными в направляющих, платформы, расположенные на опорных элементах, закрепленных на грузонесущих каретках, и привод бесконечной тяговой ленты, отличающийся тем, что, с целью уменьшения габаритов конвейера путем уменьшения радиуса поворотных участков, ходовая часть каждой грузонесущей каретки выполнена в виде вертикально расположенной гибкой пластины, прикрепленной одной боковой поверхностью к внешней стороне бесконечной тяговой ленты, а каждый опорный элемент выполнен в виде трех кронштейнов с упорами, консольно закрепленных на другой боковой поверхности гибкой пластины, и криволинейного бруса, связанного с соответствующей платформой и расположенного на кронштейнах с возможностью взаимодействия с упорами, при этом средний из кронштейнов шар- нирно связан с криволинейным брусом, а крайние кронштейны выполнены с возможностью перемещения относительно криволинейного бруса.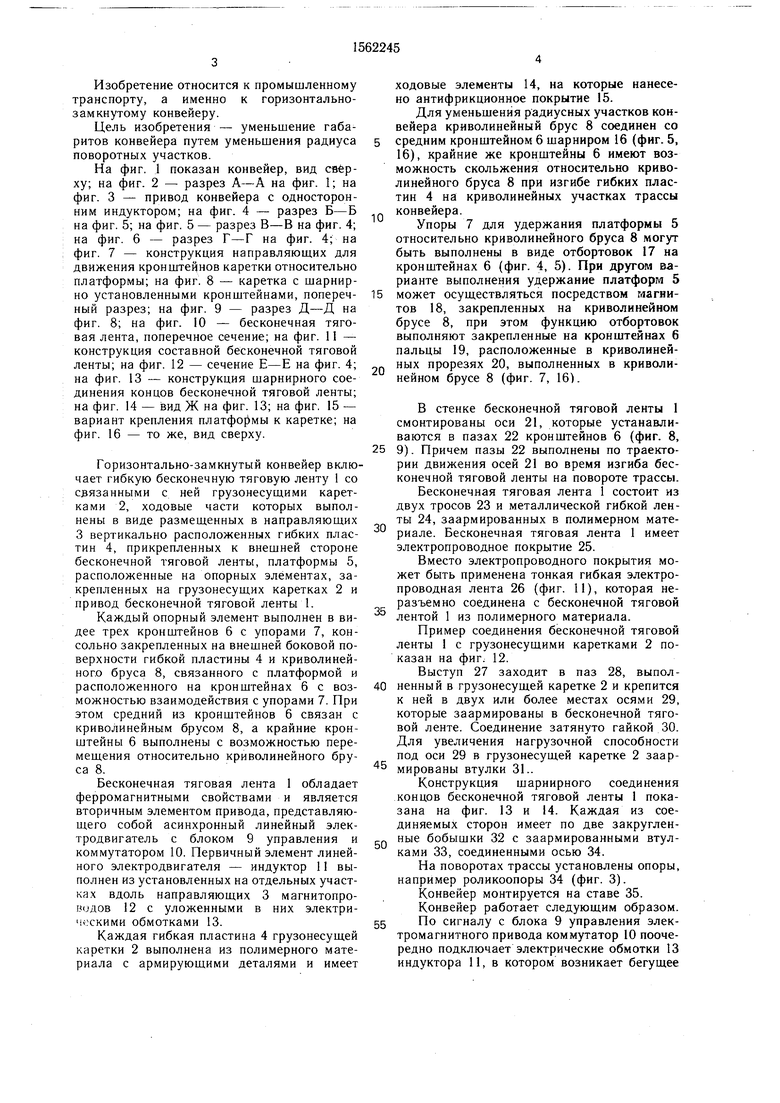
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| КАРКАСНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2001 |
|
RU2232707C2 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2011 |
|
RU2478549C1 |
| Подвесной толкающий сортировочныйКОНВЕйЕР для шТучНыХ гРузОВ | 1979 |
|
SU814487A1 |
| КРУТОНАКЛОННЫЙ КОНВЕЙЕР | 2004 |
|
RU2277504C1 |
| КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2206486C1 |
| ВЕРТИКАЛЬНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2006 |
|
RU2313479C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2011 |
|
RU2478551C1 |
| ВЕРТИКАЛЬНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2007 |
|
RU2352509C1 |
| ВЕРТИКАЛЬНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2007 |
|
RU2350539C1 |
Изобретение относится к пром. транспорту и позволяет уменьшить габариты конвейера путем уменьшения радиуса поворотных участков. С бесконечной тяговой лентой (ТЛ) 1 мконвейера связаны грузонесущие каретки 2 с ходовыми частями в виде размещенных в направляющих 3 вертикальных гибких пластин (ГП) 4. На каретках закреплены опорные элементы, на которых расположены платформы 5. Причем ГП 4 одной боковой поверхностью прикреплены с внешней стороне ТЛ 1. Каждый опорный элемент выполнен в виде трех кронштейнов (К) 6 с упорами, консольно закрепленных на другой боковой поверхности ГП 4, и криволинейного бруса 8, связанного с соответствующей платформой 5 и установленного на К 6 с возможностью взаимодействия с упорами. Средний из К 6 шарнирно связан с криволинейным брусом 8, а крайние К 6 выполнены с возможностью перемещения относительно криволинейного бруса 8. На поворотах трассы конвейера каретки 2 изгибаются. Их крайние К 6 расходятся в разные стороны, скользя по криволинейному брусу 8 при изгибе ГП 4, что позволяет проходить повороты с минимальным радиусом. 16 ил.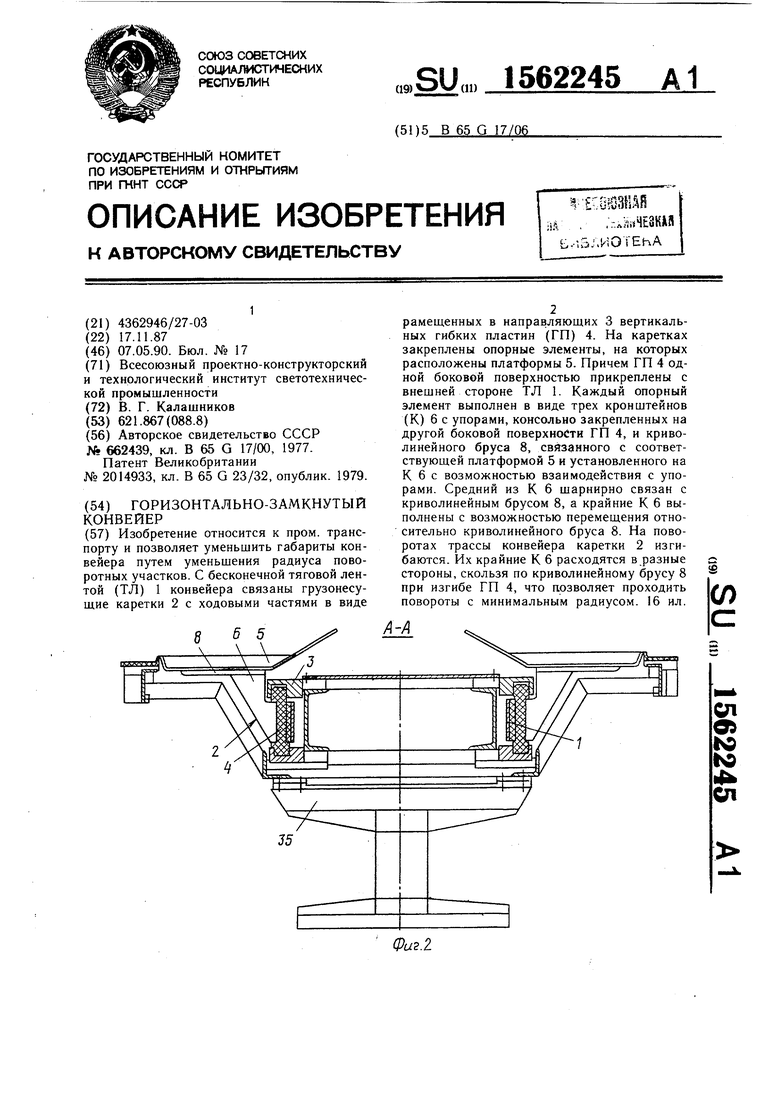
4|
иииим
nrmri
г1
ии
оо
#./
Сеть
Б-6 Г
Г
у Л - j .Гл v Л j Л /Л У1 j 3 &////////// /////7////ЯЬ аЈххЪо ххуууууух ууххххэу
12
73
«
иг.5
« 5
А
77
Фиг.
В-&
%
8
17
Щиг.5 Г-Г
Ш У//////////Л
л
s з JL rJ/i
f х. У Т)
г///г////1/у/////Л 2г
Фиг. 8
8
Фиг. 7
Щиг.9
X
28
Фиг.11
Фиг. ft
26
Фиг.11
ж
33
32
фиг. 13
34
Ч,
I
го
| Конвейер для сыпучих материалов | 1977 |
|
SU662439A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| ПРИВОД ДЛЯ ПОВОРОТНОГО СТОЛА | 1990 |
|
RU2014933C1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
