ы
ЈЈ
Изобретение относится к бортовым вычислительным устройствам, в частности к устройствам определения профильной проходимости местности перед автономными транспортными средствами, функционирующими в априори неизвестной внешней среде с препятствиями.
Цель изобретения - расширение функциональных возможностей устройства за счет формирования плана проходимости местности с точными координатами запрещенных и свободных для движения участков.
На фиг. Г представлена схема устройства для формирования плана проходимости местности перед транспортным средством; на фиг.2 - схема узла классификации рельефа; на фиг.З - схема узла управления.
Устройство для формирования плана проходимости местности перед транспортным средством содержит сканирующий лазерный дальномер 1, блок 2 обработки, блок 3 памяти, блок 4 определения крена и дифферента транспортного средства, блок 5 курсоуказателя транспортного средства, блок Ь определения текущих координат транспортного средства, узел 7 преобразования координат, узел 8 памяти, узел 9 клас сификации рельефа и узел 10 управления.
Узел 9 классификации рельефа содержит первый 11, второй 12 и третий 13 регистры, первый 14, второй 15 и третий 16 вычитатели, первый 17 и второй 18 сумматоры, элемент 19 постоянной памяти, первый 20, второй
21 и третий 22 элементы сравнения и элемент И 23.
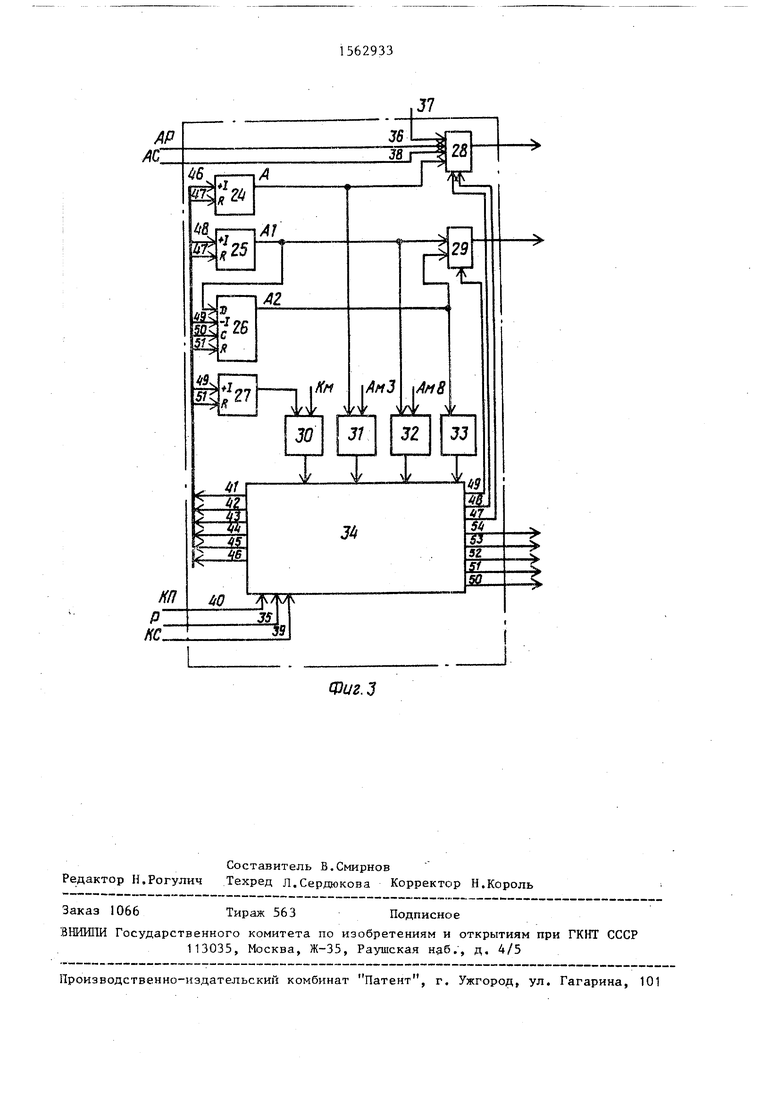
Узел 10 управления содержит с пер- вого по четвертый счетчики 24-27, первый 28 и второй 29 коммутаторы, с первого по третий элементы 30 - 32 сравнения, элемент 33 сравнения с нулем,элемент 34 микропрограммного управ- 0 ления,с первого по шестой входы 35-40 режима узла управления, с первого по четырнадцатый выходы 41-54 элемента 34 микропрограммного управления.
В качестве сканирующего дальномера 5 может использоваться лазерный дальномер .
Устройство работает следующим образом.
Исходная информация о геометричес- 0 ких характеристиках рельефа ь виде значений дальности до точек рельефа, отсчитанных от некоторого начала координат, связанного с измерителем до точек рельефа, и углов горизонтальной 5 и вертикальной развертки поступает с выходов сканирующего лазерного дальномера 1 на узел 7 преобразования координат, где преобразуется в базовую декартовую систему координат OXYZ. 0 При этом учитываются углы крена, дифферента транспортного средства, поступающие от блока 4 определения крена и дифферента транспортного средства, текущий курсовой угол, поступаю- 35 пщй от блока 5 курсоуказателя транспортного средства, и текущие координаты транспортного средства, поступающие от блока b определения текущих координат транспортного средства.Нре- 40 образование координат имеет вид

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования карты местности перед транспортным средством | 1989 |
|
SU1689971A1 |
| Устройство для вычисления положения транспортного средства | 1987 |
|
SU1495819A1 |
| Устройство для вычисления местоположения транспортного средства | 1988 |
|
SU1589292A1 |
| Устройство обнаружения и определения координат объекта на изображении | 1990 |
|
SU1737755A1 |
| Устройство для моделирования структурно-сложных объектов | 1984 |
|
SU1234845A1 |
| Цифровой квадратичный интерполятор | 1985 |
|
SU1290354A1 |
| Устройство для имитации работы автоматизированного склада | 1988 |
|
SU1714623A1 |
| Устройство для считывания графической информации | 1981 |
|
SU960872A2 |
| Устройство для отображения графической информации на экране телевизионного индикатора | 1989 |
|
SU1615783A1 |
| Устройство для вычисления элементарных функций | 1980 |
|
SU1130861A1 |

Изобретение относится к бортовым вычислительным устройствам, в частности к устройствам определения профильной проходимости местности перед автономными транспортными средствами, функционирующими в априори неизвестной внешней среде с препятствиями. Цель изобретения - расширение функциональных возможностей устройства за счет формирования плана проходимости местности с точными координатами запрещенных и свободных для движения участков. Поставленная цель достигается тем, что устройство содержит сканирующий лазерный дальномер 1, блок 2 обработки, блок 3 памяти, блок определения крена и дифферента транспортного средства, блок 5 курсоуказателя транспортного средства и блок определения текущих координат транспортного средства, при этом блок 2 обработки содержит узел 7 преобразования координат, узел 8 памяти, узел 9 классификации рельефа и узел 10 управления. 2 з.п. ф-лы, 3 ил.
X.
+Ax(oUp)AvUAW(,)
- дальность;
углы развертки дальномера;
глы крена, дифферента и курса,
вектор текущих координат транспортного средства;
вектор координат точки подвеса дальномера на транспортном средстве; матрицы поворота вектора вокруг соответствующей
+AV(90°-)AZWZ -90°)
О
(О
0
5
координатной оси на угол о(;
X,Y,Z - вектор координат проска- нированной точки рельефа в базовой системе координат .
Матрицы поворота имеют вид 1 О О
о с -s i i
О S С COS О 1 О -S О С
А „()
Ay(0f)
А2(оО
С S О
-SCO
О О 1
где С - cos о ; S - siW ; d - угол поворота. В момент окончания преобразования на выходе узла 7 преобразования координат каждый раз формируется единичных сигнал конца преобразования (КП), поступающий на шестой вход режима узла 10 управления. При этом координаты X, Y, Z просканированных точек рельефа с выходов узла 7 преобразования координат последовательно заносятся в узле 8 памяти по адресам AI 1, 2,.„«АМ8, где AMg - максимальное значение адреса, соот- вествующее последней просканирован- ной точке рельефа„
Координаты X,Y,Z каждой текущей просканированной точки рельефа с выходов узла 8 памяти поступают в узел 9 классификации рельефа, где фиксируются в соответствующих регистрах. Для каждой текущей просканированной точки рельефа Ј. X.Y, Z , координаты которой записаны в регистры узла 9 классификации рельефа, в узле 10 управления последовательно формируется подмножество адресов -1, А -2, „ .. ,А , ранее просканированных дальномером точек рельефа, где Км - заданное фиксированное число проверок на проходимость между парами просканированных точек рельефа, выполняемых для каждой просканированной точки рельефа. При этом координаты Х;, Y , Z ранее просканированных точек рельефа последовательно считываются на узел 8 памя- ти по адресам А и поступают в узел 9 классификации рельефа, где осуществляется классификация рельефа на проходимость в направлениях между парами точек X,Y,Z и Х ,У ,Z . Классификация рельефа осуществляется в соответствии с обобщенной функцией профильной проходимости транспортного средства г f(l), I L, где 1(дХ +/Sf )vt - проекция расстояния между парой точек рельефа на плоскость гориИХ X - Х |
4Y Y - Y ;
зонта;
62933
L - линейный размер корпуса транспортного средства; ZK - критический перепад высот ,между парой X,Y,Z и
X ,Y ,Z точек рельефа, при котором направление между этими точками может считаться запрещенным дл дви- Ю жения.
В узле 9 классификации рельефа функция профильной пооходимости хранится в элементе 19 постоянной памяти, выполняющего функцию функциональ- 15 ного преобразователя по адресам A. f Х, /3 У . В утле классификации ре ль- ефа вычисляются разности координат ДХ, ЛУ, UZ для пары точек X,Y,Z ,v , в случае выполнения 20 условий ЛХ I L, |ДУ1 L и |Л7. f} Z Kp участок рельефа, содержащий данную пару точек, относится к запрещенным для движения. При этом на выходах уэла 9 классификации рельефа формируются 25 единичный признак препятствия (Р) и адрес (АР), соответствующий ячейке блока 3 памяти (плана проходимости). Блок 3 организован так, что каждому дискретному участку плана местности в 30 системе координат OXYZ поставлена в соответствие1 ячейка памяти, способная хранить признак проходимости данного
дискретного участка„ Координаты X , Yp запрещенных для движения участков местности вычисляются в узле классификации рельефа как среднее арифметическое координат соответствующей пары точек рельефа.
(2)
Хр (X + Х )/2 Yp (Y + У )/2.
Адрес Ар Хр, Yp 7 блока 3 памяти, куда необходимо записать признак Р, может быть вычислен непосред- ственно на сумматорах
Хр 1(Х + Х )Г , (У+У )Г,
(3)
где 1Г - операция выделения соответствующих разрядов кода. В узле 10 управления признак Р анализируется и, если он равен единице, по адресу АР в блоке 3 памяти
записан единичный признак препятствия. Аналогичные операции выполняются для всех точек рельефа X ,Y ,Z , координаты которых хранятся в узле 8 памяти по адресам А2. В результате
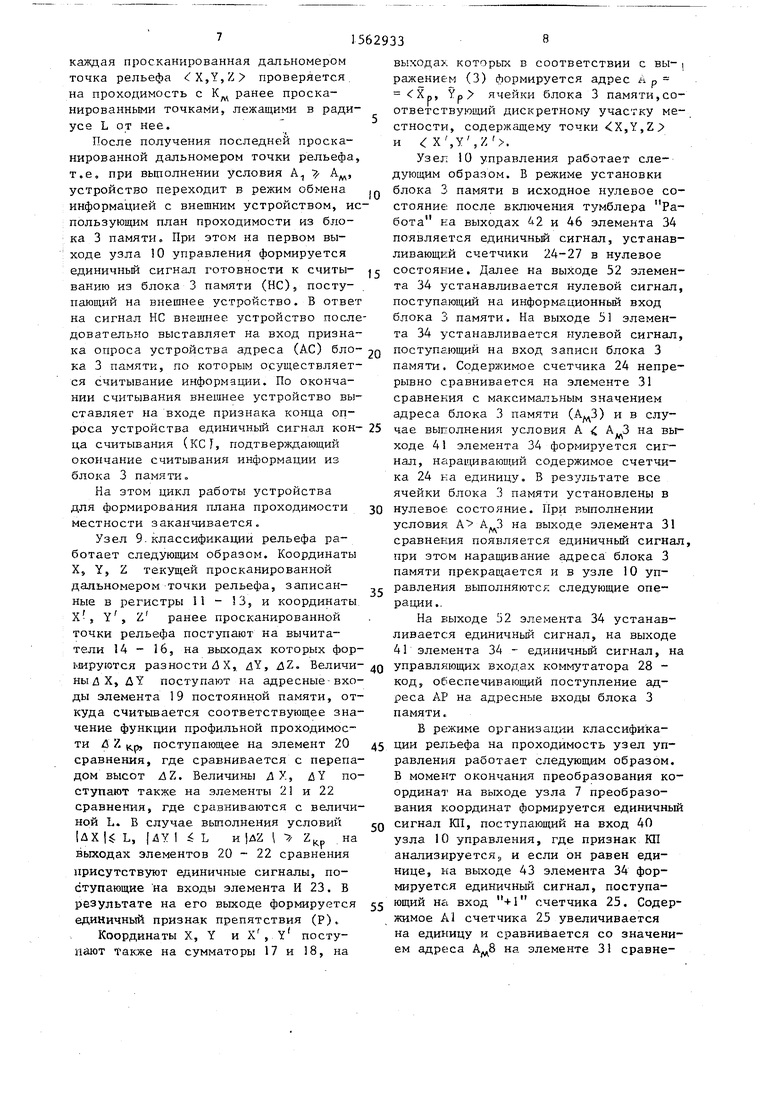
каждая просканированная дальномером точка рельефа X,Y,Z проверяется на проходимость с Км ранее проска- нированными точками, лежащими в радиусе L от нее.
После получения последней лроска- нированной дальномером точки рельефа, т.е. при выполнении условия А1 7/ Aw, устройство переходит в режим обмена , Q информацией с внешним устройством, использующим план проходимости из блока 3 памяти. При этом на первом выходе узла 10 управления формируется
выхода которых в соответствии с вы-( ражением (3) сформируется адрес а р Хр, Yp ячейки блока 3 памяти,соответствующий дискретному участку местности, содержащему точки X,Y,Z и X ,y ,Z .
Узег. 10 управления работает следующим образом. В режиме установки блока 3 памяти в исходное нулевое состояние после включения тумблера Работа на выходах 42 и 46 элемента 34 появляется единичньй сигнал, устанавливающий счетчики 24-27 в нулевое
единичньй сигнал готовности к считы- состояние. Далее на выходе 52 элеменванию из блока 3 памяти (НС)9 посту-та 34 устанавливается нулевой сигнал,
пающий на внешнее устройство. В ответпоступающий на информационный вход
на сигнал НС внешнее устройство после-блока 3 памяти. На выходе Ы элемендовательно выставляет на вход призна-та 34 устанавливается нулевой сигнал,
ка опроса устройства адреса (АС) бло- 2Qпоступающий на вход записи блока 3
ка 3 памяти, по которым осуществляет-памяти. Содержимое счетчика 24 непре- ся считывание информации. По окончании считывания внешнее устройство выставляет на входе признака конца опрывно сравнивается на элементе 31 сравнения с максимальным значением адреса блока 3 памяти (АМ3) и в слурывно сравнивается на элементе 31 сравнения с максимальным значением адреса блока 3 памяти (АМ3) и в слуроса устройства единичньй сигнал кон- 25 чае выголнения условия А на вы- ца считывания (КС, подтверждающий ходе 41 элемента 34 формируется сиг- окончание считывания информации из нал, наращивающий содержимое счетчика 24 I-а единицу. В результате все ячейки блока 3 памяти установлены в 30 нулевое состояние. При выполнении
условия А на выходе элемента 31 сравнения появляется единичный сигнал, при этом наращивание адреса блока 3 памяти прекра0;ается и в узле 10 уп- зс равления выполняются следующие операции.
На выходе элемента 34 устанавливается единичный сигнал, на выходе 41 элемента 34 - единичный сигнал, на
блока 3 памяти о
На этом цикл работы устройства для формирования плана проходимости местности заканчивается.
Узел 9 классификации рельефа работает следующим образом. Координаты X, Y, Z текущей просканированной дальномером точки рельефа, записанные в регистры 11 - 3S и координаты X , Y , Z ранее просканированной точки рельефа поступают на вычита- тели 14 - 16, на выходах которых формируются разности ДХ, 4Y, л2. Величи- 49 управляющих входах коммутатора 28 - ныдХ, ЈY поступают на адресные вхо- код, обеспечивающий поступление ад- ды элемента 19 постоянной памяти, от- реса АР на адресные входы блока 3 куда считывается соответствующее зна- памяти.
чение функции профильной проходимое- В режиме организации классифика- ти Л Z Кр, поступающее на элемент 20 Д5 Чии рельефа на проходимость узел уп- сравнения, где сравнивается с перепа- равления работает следующим образом, дом высот ЛZ. Величины Л У, Л Y поступают также на элементы 21 и 22 сравнения, где сравниваются с величиной L. В случае выполнения условий о сигнал КП, поступающий на вход 40 ДХ|$ L, AY L и |uZ ZKp на узла 10 управления, где признак КП выходах элементов 20 - 22 сравнения анализируетсяэ и если он равен еди- присутствуют единичные сигналы, по- нице, на выходе 43 элемента 34 фор- ступающие на входы элемента И 23. В мируется единичньй сигнал, поступа- результате на его выходе формируется 55 Ч™ на ВХ°Д +1 счетчика 25. Содер- единичный признак препятствия (Р), жимое AJ счетчика 25 увеличивается
Координаты X, Y и X , Y1 посту- на единицу и сравнивается со значени- иают также на сумматоры 17 и 18, на ем адреса АМ8 на элементе 31 сравнеВ момент окончания преобразования координат на выходе узла 7 преобразования координат формируется единичный
выхода которых в соответствии с вы-( ражением (3) сформируется адрес а р Хр, Yp ячейки блока 3 памяти,соответствующий дискретному участку местности, содержащему точки X,Y,Z и X ,y ,Z .
Узег. 10 управления работает следующим образом. В режиме установки блока 3 памяти в исходное нулевое состояние после включения тумблера Работа на выходах 42 и 46 элемента 34 появляется единичньй сигнал, устанавпамяти. Содержимое счетчика 24 непре-
рывно сравнивается на элементе 31 сравнения с максимальным значением адреса блока 3 памяти (АМ3) и в случае выголнения условия А на вы- ходе 41 элемента 34 формируется сиг- нал, наращивающий содержимое счетчика 24 I-а единицу. В результате все ячейки блока 3 памяти установлены в нулевое состояние. При выполнении
условия А на выходе элемента 31 сравнения появляется единичный сигнал, при этом наращивание адреса блока 3 памяти прекра0;ается и в узле 10 уп- равления выполняются следующие операции.
На выходе элемента 34 устанавливается единичный сигнал, на выходе 41 элемента 34 - единичный сигнал, на
управляющих входах коммутатора 28 - код, обеспечивающий поступление ад- реса АР на адресные входы блока 3 памяти.
В режиме организации классифика- Чии рельефа на проходимость узел уп- равления работает следующим образом, сигнал КП, поступающий на вход 40 узла 10 управления, где признак КП анализируетсяэ и если он равен еди- нице, на выходе 43 элемента 34 фор- мируется единичньй сигнал, поступа- Ч™ на ВХ°Д +1 счетчика 25. Содер- жимое AJ счетчика 25 увеличивается
В момент окончания преобразования координат на выходе узла 7 преобразования координат формируется единичный
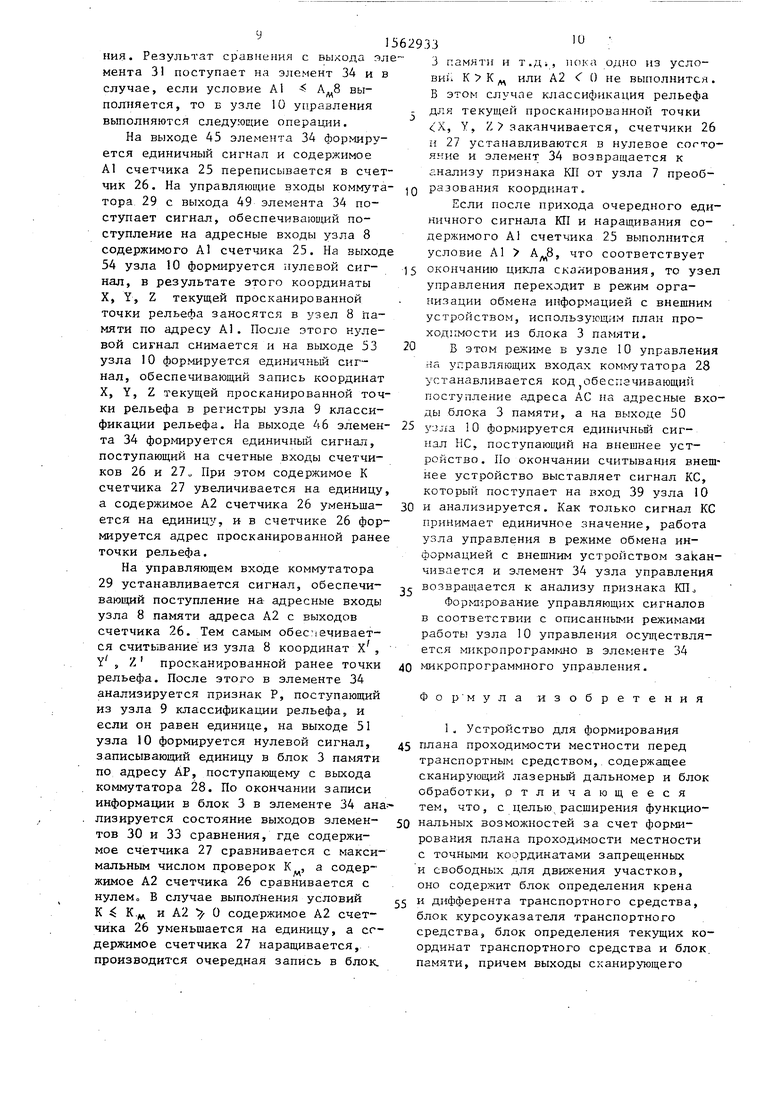
ния. Результат сравнения с выхода элемента 31 поступает на элемент 34 и в
Лм8
выслучае, если условие Al полняется, то Б узле 10 управления выполняются следующие операции.
На выходе 45 элемента 34 формируется единичный сигнал и содержимое А1 счетчика 25 переписывается в счетчик 26. На управляющие входы коммутатора 29 с выхода 49 элемента 34 поступает сигнал, обеспечивающий поступление на адресные входы узла 8 содержимого А1 счетчика 25. На выходе 54 узла 10 формируется нулевой сигнал, в результате этого координаты X, Y, Z текущей просканированной точки рельефа заносятся в узел 8 памяти по адресу А1. После этого нулевой сигнал снимается и на выходе 53 узла 10 формируется единичный сигнал, обеспечивающий запись координат X, Y, Z текущей просканированной точки рельефа в регистры узла 9 классификации рельефа. На выходе 46 элемен- 25 узла 10 формируется единичный сиг- та 34 формируется единичный сигнал, нал НС, поступающий на внешнее устПо
поступающий на счетные входы счетчиков 26 и 27„ При этом содержимое К счетчика 27 увеличивается на единицу, а содержимое А2 счетчика 26 уменьшается на единицу, и в счетчике 26 формируется адрес просканированной ранее точки рельефа.
На управляющем входе коммутатора 29 устанавливается сигнал, обеспечивающий поступление на адресные входы узла 8 памяти адреса А2 с выходов счетчика 26. Тем самым обеспечиваетроиство. По окончании считывания вн нее устройство выставляет сигнал КС который поступает на вход 39 узла 1
30 и анализируется. Как только сигнал К принимает единичное значение, работа узла управления в режиме обмена информацией с внешним устройством зака чивается и элемент 34 узла управлени
возвращается к анализу признака КПо
Формирование управляющих сигналов в соответствии с описанными режимами работы узла 10 управления осуществля ется микропрограммно в элементе 34 микропрограммного управления.
ся считывание из узла 8 координат X
просканированной ранее точки
Y , Z
рельефа. После этого в элементе 34 анализируется признак Р, поступающий из узла 9 классификации рельефа, и если он равен единице, на выходе 51 узла 10 формируется нулевой сигнал, записывающий единицу в блок 3 памяти по адресу АР, поступающему с выхода коммутатора 28. По окончании записи информации в блок 3 в элементе 34 ана лизируется состояние выходов элементов 30 и 33 сравнения, где содержимое счетчика 27 сравнивается с максимальным числом проверок К , а содержимое А2 счетчика 26 сравнивается с нулем В случае выполнения условий К К и А2 0 содержимое А2 счетчика 26 уменьшается на единицу, а содержимое счетчика 27 наращивается, производится очередная запись в блок.
и т.д., одно из уело- или А2 О не выполнится,
j памяти вик К Км В этом случае классификация рельефа для текущей просканированной точки Х, Y, Z заканчивается, счетчики 26 и 27 устанавливаются в нулевое согто- я«ие и элемент 34 возвращается к снализу признака КП от узла 7 преобJQ разования координат.
Если после прихода очередного единичного сигнала КП и наращивания содержимого А1 счетчика 25 выполнится условие Al , что соответствует
5 окончанию цикла сканирования, то узел управления переходит в режим организации обмена информацией с внешним устройством, использующим план проходимости из блока 3 памяти.
20 в этом режиме в узле 10 управления ia управляющих входах коммутатора 28 устанавливается код обеспечивающий поступление адреса АС на адресные входы блока 3 памяти, а на выходе 50
По
роиство. По окончании считывания внешнее устройство выставляет сигнал КС, который поступает на вход 39 узла 10
и анализируется. Как только сигнал КС принимает единичное значение, работа узла управления в режиме обмена информацией с внешним устройством заканчивается и элемент 34 узла управления
возвращается к анализу признака КПо
Формирование управляющих сигналов в соответствии с описанными режимами работы узла 10 управления осуществляется микропрограммно в элементе 34 микропрограммного управления.
Формула изобретения
лазерного дальномера, блока определения крена и дифферента транспортного средства, блока курсоуказагеля транспортного средства и блока определе- ( ния текущие координат транспортного средства подключены соответственно к информационным входам группы блока обработки, первый, второй., третий и четвертый выходы которого подключены соответственно к выходу признака готовности результата устройства, к адресному входу, к входу записи-чтения и к информационному входу блока памяти, выход которого подключен к выходу
результата устройства, вход признака опроса устройства вход признака конца, опроса устройства и вход линейного размера транспортного средства устройства подклк чены соответственно к пер- 20 вого элемента сравнения, выход кото- вому входу режима, к второму входу ре- рого подключен к первому входу эле- жнма и к первому информационному вхо- мента И, второй информационный вход
5
0 вого элемента сравнения, выход кото- рого подключен к первому входу эле- мента И, второй информационный вход
управления, шестой вход режима к°то- рого подключен к выходу узла преобразования координат, второй, третий и четвертый информационные входы блока обработки подключены соответственно к седьмому, восьмому и девятому входам режима узла управления,
0
5
0
узла подключен к информационному входу второго регистра, первому информационному входу второго вычитателя и первому информационному входу первого сумматора, выход второго вычитателя подключен к первому адресному входу элемента постоянной памяти и первому входу второго элемента сравнения, выход которого подключен к второму входу элемента Л, третий информационный вход узла подключен к информационному входу третьего регистра, первому информационному входу третьего вычитателя и первому информационному входу второго сумматора, выход третьего вычитателя подключен к второму адресному входу элемента постоянной памяти я первому входу третьего элемента сравнения, выход которого подключен к третьему входу элемента И, выход которого подключен к первому выходу узла, управляющий вход которого подключен к входам записи-считывания регистров с первого по третий, выход первого регистра подключен к второму информационному входу первого вычитателя, выход второго регистра Q подключен к второму информационному входу второго вычитателя и второму информационному входу первого сумматора, выход которого подключен к второму выходу узла, четвертый информационный вход которого подключен к вторым входам второго и третьего элементов сравнения, выход третьего регистра подключен к второму информационному входу третьего вычи5
5
Фиг.З
| Пупков К.А., Жуков С.А., Здоров М.В | |||
| и др | |||
| Алгоритмическое и программное обеспечение автономного транспортного робота | |||
| Информационные и управляющие системы роботов: Сб.научных трудов | |||
| - М.: НИМ АН СССР, 1982, с.201-213 | |||
| Устройство для определения профиля местности перед транспортным средством | 1981 |
|
SU1024719A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
