(Л
с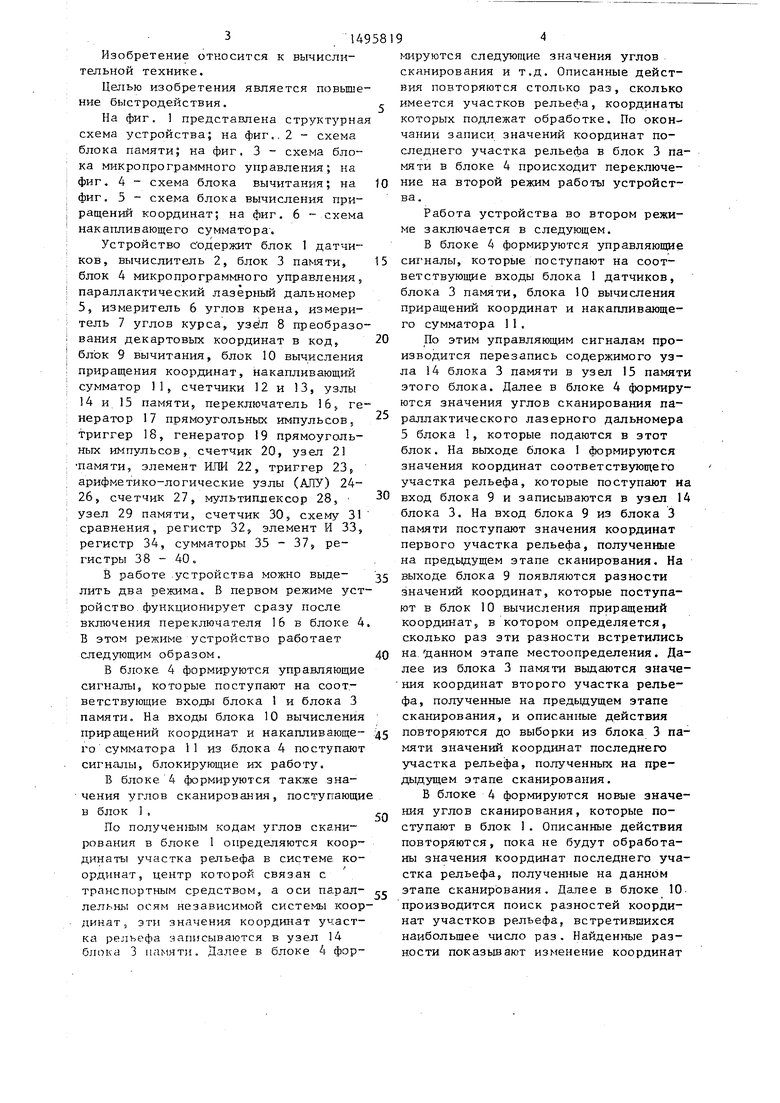


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования плана проходимости местности перед транспортным средством | 1988 |
|
SU1562933A1 |
| Устройство для формирования карты местности перед транспортным средством | 1989 |
|
SU1689971A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Устройство для определения местоположения транспортного средства | 1987 |
|
SU1481801A1 |
| Устройство для распознавания знаков | 1977 |
|
SU648144A3 |
| Устройство для обработки многотоновых изображений | 1988 |
|
SU1608698A1 |
| Устройство для цифровой обработки сигналов | 1986 |
|
SU1397937A1 |
| Устройство для вычисления местоположения транспортного средства | 1988 |
|
SU1589292A1 |
| Аппроксимирующий функциональный преобразователь | 1984 |
|
SU1205153A1 |
| Вычислительный блок матричного устройства для решения дифференциальных уравнений в частных производных | 1989 |
|
SU1605253A1 |
Изобретение относится к вычислительной технике. Целью изобретения является повышение быстродействия. Устройство содержит блок 1 датчиков, вычислитель 2, блок 3 памяти, блок 4 микропрограммного управления, параллактический лазерный дальномер 5, измеритель 6 углов крена, измеритель 7 углов курса, узел 8 преобразования декартовых координат в код, блок 9 вычитания, блок 10 вычисления приращения координат, накапливающий сумматор 11, 1 з.п. ф-лы, 6 ил.
4
сл
00
со
3149
Изобретение откосится к вычислительной технике.
Целью изобретения является ловыше- ние быстродействия.
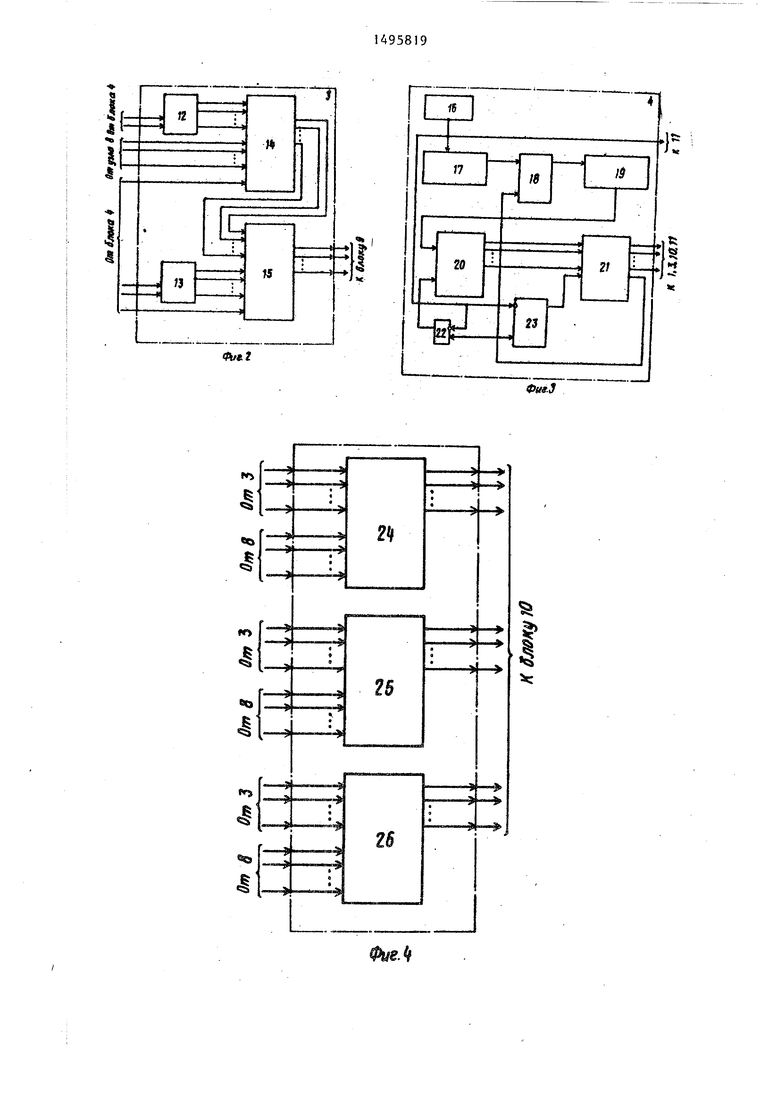
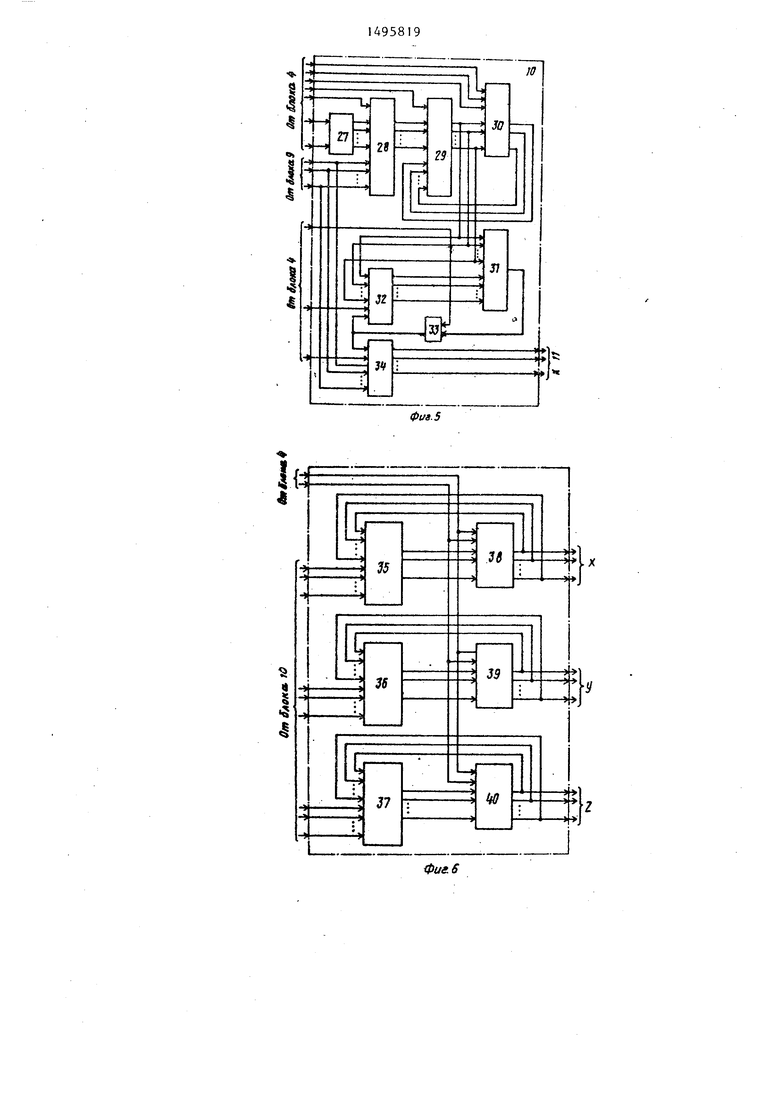
На фиг. 1 представлена структурная схема устройства; на фиг., 2 - схема блока памяти; на фиг, 3 - схема блока микропрограммного управления; на фиг. 4 - схема блока вычитания; на фиг, 5 - схема блока вычисления приращений координат; на фиг. 6 - схема накапливающего сумматора.
Устройство Содержит блок 1 датчиков, вычислитель 2, блок 3 naNMTH, блок 4 микропрограммного управления, параллактический лазерньй дальномер 5, измеритель 6 углов крена, измеритель 7 углов курса узел 8 преобразования декартовьпс координат в коц, блок 9 вычитания, блок 10 вычисления приращения координат, накапливающий сумматор И, счетчики 12 и 13, узлы 14 и 15 памяти, переключатель 16,, генератор 17 прямоугольных импульсов, триггер 18, генератор 19 прямоугольных импульсов, счетчик 20, узел 21 памяти, элемент ИЛИ 22, триггер 23р арифметико-логические узлы (АЛУ) 24- 26, счетчик 27, мультиплексор 28, узел 29 памяти, счетчик 30, схему 31 сравнения, регистр 32, элемент И 33, регистр 34, сумматоры 35 - 37, регистры 38-40.
В работе .устройства можно выде- лить два режима. В первом режиме устройство, функционирует сразу после включения переключателя 16 в блоке 4 В этом режиме устройство работает следующим образом.
В блоке 4 формируются управляющие сигналы, которые поступают на соответствующие входы блока 1 и блока 3 памяти. На входы блока 10 вычисления приращений координат и накапливающе- го сумматора 11 из блока 4 поступают сигналы, блокирующие их работу.
В блоке 4 формируются также зна- чения углов сканирования, поступающи в блок 1 ,
По полученным кодам углов сканирования в блоке 1 определяются координаты участка рельефа в системе ко- ордннат, центр которой связан с транспортным средством, а оси парал- лельны осям независ1- мой систеь- ы координат, эти значения координат участка рельефа записываются в узел 14 блока 3 памяти. Далее в блоке 4 фор
0
5 0 0
5 0
5
с
0
мируются следующие значения углов сканирования и т.д. Описанные действия повторяются столько раз, сколько имеется участков рельефа, координаты которых подлежат обработке. По окончании записи значений координат последнего участка рельефа в блок 3 памяти в блоке 4 происходит переключение на второй режим работы устройства.
Работа устройства во втором режиме заключается в следующем.
В блоке 4 формируются управляющие сигналы, которые поступают на соответствующие входы блока 1 датчиков, блока 3 памяти, блока 10 вычисления приращений координат и накапливающего сумматора 11.
По этим управляющим сигналам производится перезапись содержимого узла 14 блока 3 памяти в узел 15 памяти этого блока. Далее в блоке 4 формируются значения углов сканирования параллактического лазерного дальномера 5 блока 1, которые подаются в этот блок. На выходе блока 1 формируются значения координат соответствующего участка рельефа, которые поступают на вход блока 9 и записываются в узел 14 блока 3. На вход блока 9 из блока 3 памяти поступают значения координат первого участка рельефа, полученные на предыдущем этапе сканирования. На выходе блока 9 появляются разности значений координат, которые поступают в блок 10 вычисления приращений координат, в котором определяется, сколько раз эти разности встретились на данном этапе местоопределення. Далее из блока 3 памяти выдаются значе- ния координат второго участка рельефа, полученные на предыдущем этапе сканирования, и описанные действия повторяются до выборки из блока 3 памяти значений координат последнего участка рельефа, полученных на предыдущем этапе сканирования.
В блоке 4 формируются новые значения углов сканирования, которые поступают в блок 1. Описанные действия повторяются, пока не будут обработаны значения координат последнего участка рельефа, полученные на данном этапе сканирования. Далее в блоке 10- производится поиск разностей координат участков рельефа, встретившихся наибольшее число раз. Найденные разности показывают изменение координат
51
транспортного средства со времени .предыдущего этапа сканирования. Полученные приращения текущих координат транспортного средства передаются из блока 10 в накапливающий сумматор 11 где они суммируются с текущими координатами транспортного средства, полученными после-предыдущего этапа местоопределения, Полученные текущие координаты.транспортного средства запоминаются в накапливающем сумматоре . Далее в блоке 3 памяти производится перезапись содержимого узла 14 памяти в узел 15. По окончании этой перезаписи этап местоопределения заканчивается. В дальнейшем устройство работает только по ETopobf режиму .
Следующий этап местоопределения начинается через некоторое время, ко- ,торое определяется требованием к площади перекрытия изобрагсений, полу- чает-Фгх блоком 1 при двух соседних местоопределениях, требование к гшо- щади перекрытия изображения определяется опытным путем. УпраЕление началом этапов местоопределения осуществляется блоком 4.
Блок 1 функционирует следующим об- разом.
Из блока 4 на входы дальномера 5 поступают значения углов сканирования и соответствующие управляющие сигналы. В дальномере 5 по полученным углам сканирования производится измерение расстояния до соответствующего участка рельефа. По полученной величине дальности и значениям углов сканирования- вычисляются координать: участка рельефа в связанной с трайс портным средством системе кoopдIiнaт.
,Эти значения поступают в узел 8 преобразования декартовых координат, на другие входы этого устройства от из мерителя 6 подаются значения углов крена (например, гидровертикали ) и дифферента транспортного средства, а от Измерителя 7 (например, курсоука- зателя) - значения угла курса транспортного средства. .В узле 8 преобразования декартовых координат в соответствии с известными формулами производится преобразование координат участка рельефа с учетом значений углов курса, крена и дифферента. Полученные величины поступают на выход блок а I.
д 5
0 5
о
5
Э
п
Q ,
196
Блок 3 памяти функционирует в двух режимах. Первый режим - это перезапись содержимого узла 14 в узел 15. В этом режиме узел 14 находится в режиме Чтение и счетчики 12 и 13 работают синхронно. Б начале счетчики 12 и 13 находятся в нулевом состоянии. По нулевому адресу производится выборка содержимого узла 14, далее производится запись по этому же адресу Б узел 15 информации с выхода узла 14 памяти. После окончания цикла записи содержимое счетчиков 12 и 13 наращивается на единицу и по новому адресу производится перезапись информации из узла 14 в узел 15 и так далее до полного перебора всех адресов.
Во втором режиме блок 3 памягл работает следующим образом. Перед началом згого режима 12 и 13 также устанавливаются в нулевое состояние, узел 15 памяти - в режиме считъшания. При поступлении на информационные входы узла 14 значений координат первого участка рельефа производится запись их в этот узел. Одновременно производится считывание из узла 15 значений координат первого участка рельефа, полученных на предыдущем этапе сканирования. После обработки этих координат в блоках 9 и 10 наращивается содержимое счетчика 13 на единицу и по HOBON - адресу считываются из узла 15 значения координат следующего участка рельефа, полученные на предыдущем этапе сканирования, и так далее до полной выборки содержимого узла 5 памяти. Далее производится обнуление счетчика 13 и наращивание содержимого счетчика 12 на единицу, по новому адресу производится запись в узел 14 значений коорди-. нат следующего участка рельефа, полученных от блока 1, и так далее до полного заполнения узла 14 памяти и обработки всей информации в блоках 9 и 10.
Блок 9 включает в себя три АЛУ 24 - 26 соответственно для координат X, у и Z. На входы этих АПУ поступают значения координат i-ro участка рельефа з:., у, г, полученные на предыдущем этапе сканирования . На другие входы этих АЛУ поступают значения координат j-ro участка рельефа :с2 yS , полученные на данном этапе сканирования. На выходе АПУ 24 формируются разности значений координат /1х,
X
- х, на выходах АЛУ 25 и 26, соответственно, йу ;,- у1 Z j - г: J,
Эти разности подаются на входы блок а 10 .
Блок 10 функционирует в двух режимах. Первый режим - это режим обнуления узла 29 ламяти, второй режим - это собственно режим вычисления при- ращений координат транспортного средства .
В первом режиме блок 10 функционирует следующим образом,
Пере,ц началом режима счетчики 27 и 30 находятся в нулевом состоянии, На управляющем входе мультиплексора 28 устанавливается логический уровень, обеспечивающий передачу инфор30
мации с выходов счетчика 27 на адрес-20 тнвшиеся на данном этапе местоопреденый вход узла 29. Так как счетчик 30 находится в нулевом состоянии, на информационный вход узла 29 подают уровни логических нулей. По нулевому адресу в узле 29 производится запись,25 далее наращивается на единицу содержимое счетчика 27.
После установки на адресном входе узла 29 нового адреса по нему производится запись в узел 29, далее снова наращивается содержимое счетчика
27на единицу, и так далее до полного обнуления узла 29 памяти.
Во втором режиме блок 10 фуикцио- нирует следующим образом.
Перед началом режима производится сброс содержимого регистров 32 и 34, на. управляющем входе мультиплексора
28устанавливается уровень, соответствующий передаче через него мации от блока 9 на адресньй вход узла 29. При поступлении от блока 9 вычисленных в нем разностей координат на ВХО.Д регистра 34 и на адрес™
35
40
ления наибольшее число раз, Эти разности и показывают приращение координат транспортного средства со времени предыдущего местоопределения,
Найденные приращения координат транспортного.средства с выхода регистра 34 подаются на вход накапливающего сумматора 11.
Накапливающий сумматор работает следукщим образом.
При включенном положении переключателя 16 блока 4 происходит сбро-с содержимого регистров 38 - 40, предназначенных для хранения текущих координат X . УТ z транспортного средства.
После формирования приращений 4х J Л у,,5 z. координат транспортного средства на выходе сумматора 35 появляется значение х. x-j-., + гв на выходах сумматоров 36 и 37 - соот- ветственно значения Yrt Ут и s-rt ST-4.,+ Az где :с.,, у. 2 координаты транспортного средный вход узла 29 по этому адресз про 45 полученные после предыдущего изводится считывание из узла 29 записанной в нем информации. Эта информация записывается в счетчик 30 и одновременно поступает на вход регистра 32 и вход схемы 31 сравненггШ,, на другой вход схемы 31 сравнения и поступает информация с выхода регистра 32, Если на первом входе 3 сравнения-находится число большее,, чем на втором входе, на выходе схеьы сравнения появляется уровень логи- |Ческой единицы, который поступает на вход элемента И 33, на второй вход элемента 33 из блока 4 подается им55
местоопределения. Новые значений ко ординат транспортного средства зап сываются соответственно в регистры 38 - 40 и выдаются устройству-потр бителю, например системе управления движением транспортного средства- ип на табло индикации для водителя тр спортного средства.
Формула изобретени
1, Устройство для вычисления пол жения транспортного средства, содер жащее блок датчиков, вычислитель,
пульс, по фронту этого импульса в случае, если выполняется данное условие, в регистр 32 записывается число, поступающее на его информационный вход, а в регистр 34 - адрес узла 29, соответствующий разностям координат, выработанным в блоке 9, Содержимое счетчика 30 наращивается на единицу И полученное число записывается в узел 29 памяти. На этом обработка данной разности координат заканчивается .
Описанная работа блока 10 повторяется для всех раэностей, поступающих на вход этого блока из вычитающего блока 9. По окончании обработки всех разностей координат в регистре 34 хранятся разности координат, встре0
5
5
0
ления наибольшее число раз, Эти разности и показывают приращение координат транспортного средства со времени предыдущего местоопределения,
Найденные приращения координат транспортного.средства с выхода регистра 34 подаются на вход накапливающего сумматора 11.
Накапливающий сумматор работает следукщим образом.
При включенном положении переключателя 16 блока 4 происходит сбро-с содержимого регистров 38 - 40, предназначенных для хранения текущих координат X . УТ z транспортного средства.
После формирования приращений 4х J Л у,,5 z. координат транспортного средства на выходе сумматора 35 появляется значение х. x-j-., + гв на выходах сумматоров 36 и 37 - соот- ветственно значения Yrt Ут и s-rt ST-4.,+ Az где :с.,, у. 2 координаты транспортного сред полученные после предыдущего
местоопределения. Новые значений координат транспортного средства записываются соответственно в регистры 38 - 40 и выдаются устройству-потребителю, например системе управления движением транспортного средства- ипи на табло индикации для водителя транспортного средства.
Формула изобретения
1, Устройство для вычисления положения транспортного средства, содержащее блок датчиков, вычислитель,
914
блок памяти, отличающее- с я тем, что, с целью повышения быстродействия, в него введен блок микропрограммного управления, блок датчиков содержит параллактический лазерный дальномер, измеритель углов крена, измеритель углов курса и узел преобразования декартовых координат в код, вычислитель включает блок вы- читания, блок вычисления приращений координат и накапливающий сумматор, информационный вход которого соединен с выходом блока вычисления приращений координат, информационные входы узла преобразования декартовых координат в код соединены с выходами параллактического лазерного дальномера, измерителя углов крена и измерителя углов курса, выход узла преобразова- ния декартовых координат в код соединен с информационным входом блока памяти и с входом вычитаемого блока вычитания, вход уменьшаемого которого соединен с выходом блока памяти, вы- ход блока вычитания соединен с входом разностей координат блока вычисления приращений координат, информационный вход параллактического лазер- ного дальномера соединен с выходом значений углов сканирования блока микропрограммного управления, установочный вход параллактического лазерного дальномера, установочный и синхронизирующий входы узла преобразования декартовых координат в код, установочный вход, адресный вход, вхрд записи-считывания блока памяти, установочный вход, вход приращений адреса, вход признака коммутации,
вход записи-считывания, вход записи блока приращений координат, устано
Q 5 0 5 О Q
5
1910
вечный вход и вход записи накапливающего сумматора соединень с выходами кода операций блока микропрограммного управления,

| Патент США 4602334, (кл. | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Патент США № 4653002, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Система зрительной навигации подвижного робота FIDO | |||
| - Экспресс-информация: Робототехника, 1987, № 8, с..17-21. | |||
