Os 00
о ю
VJ
Изобретение относится к вычислительной технике и может быть использовано для определения профильной проходимости местности перед автономными транспортными средствами, функционирующими в априори неизвестной внешней среде с препятствиями.
Цель изобретения - расширение функциональных возможностей за счет обеспечения каждого дискретного участка карты признаком, пропорциональным степени сложности преодоления данного участка транспортным средством.
На фиг. 1 представлена структурная схема устройства; на фиг. 2 -типовая форма системы функций профильной проходимости ходовой части транспортного средства, используемой для формирования при- знакоп проходимости участков; на фиг. 3- схема узла формирования признака прохо- димогл и участка рельефа; на фиг. 4 - схема узла микропрограммного управления; на фиг. 5 - схема микропрограммного автомата.
Устройство содержит сканирующий лазерный дальномер 1, блок 2 определения крена и дифферента, блок 3 курсоуказателя, блок 4 определения текущих координат, блок 5 памяти, блок 6 обработки, состоящий из узла 7 преобразования координат, узла 8 памяти, узла 9 микропрограммного управления и узла 10 формирования признака проходимости участка рельефа, регистры 11-13, вычитатели 14-16, сумматоры 17 и 18, элементы 19 и 20 постоянной памяти, элементы 21-25 сравнения, шифратор 26, коммутатору 27 и 28, элемент И 29, счетчики 30-32 адреса, счетчик 33 числа проверок на проходимость, коммутаторы 34 и 35 адресов, элементы 36-39 сравнения, переключа- т,ель 40, микропрограммный автомат 41, имеющий входы 42-44 внешних признаков, выходы 45-49 внешних управляющих сигналов, выходы 50-58 внутренних управляющих сигналов и входы 59-63 внутренних признаков, элементы И 64-72Дэлемент ИЛИ 73, элемент НЕ 74, генератор 75 тактовых им- пульсоз (ГТИ), счетчик 76 адреса микрокоманд, память 77 микрокоманд.
Устройство работает следующим образом.
В исходном состоянии в ячейках блока 5 памяти, предназначенного для хранения карты местности, записаны произвольные значения признаков проходимости. Поэтому перед началом обработки информации от дальномера в каждую ячейку блока 5 памяти записывается начапьное значение у0 (у0 0) признака, соответстгзующее тому, что проходимость дискретных участков карты по определена. При этом на выходе узла 9 микропрограммного управления устанавливается нулевой сигнал, поступающий на вход узла 10. В результате начальное значение признака проходимости у0 , поступающее на информационный вход узла 10 с соответствующего входа устройства, проходит на выход узла 10 и связанный с ним информационный вход блока 5 памяти. Одновременно на выходе узла 9 формируется нулевой сигнал, поступающий на вход записи чтения блока 5 памяти и переводящий его в режим- записи. После
этого на выходе узла 9 последовательно формируются адреса А 0,1,,.., Ат5, поступающие на адресный вход блока 5 памяти, где Ат5 - максимальное значение адреса. В результате все ячейки памяти будут установлены в исходное состояние. Текущее значение адреса непрерывно сравнивается в узле 9Qc максимальным значением, поступающим на вход режима узла 9 с второго входа константы устройства, и в случае
когда текущее значение адреса больше максимального, наращивание адреса прекращается. После этого сигналы на соответствующих выходах узла 9 переводятся в единичное состояние, и устройство переходитв режим обработки информации от дальномера.
Исходная информация о рельефе в виде значений дальности, отсчитанных от некоторого начала координат, связанного с измерителем до точек рельефа, и углов горизонтальной и вертикальной развертки с выхода сканирующего дальномера 1 поступает на узел 7 преобразования координат, где преобразуется в базовую декартовую
систему координат.
При этом учитываются углы крена, дифферента транспортного средства, поступающие от блока 2 определения крена и дифферента, текущий курсовой угол, поступающий от блока 3 курсоуказателя, и текущие координаты транспортного средства, поступающие от блока 4 определения теку- а;их координат.
В момент окончания преобразования
ьа выходе узла 7 каждый раз формируется признак конца преобразования, поступающий на вход узла 9. При этом координаты X, Y, Z просканированных точек рельефа с выходов узла 7 заносятся в узел 8 памяти по
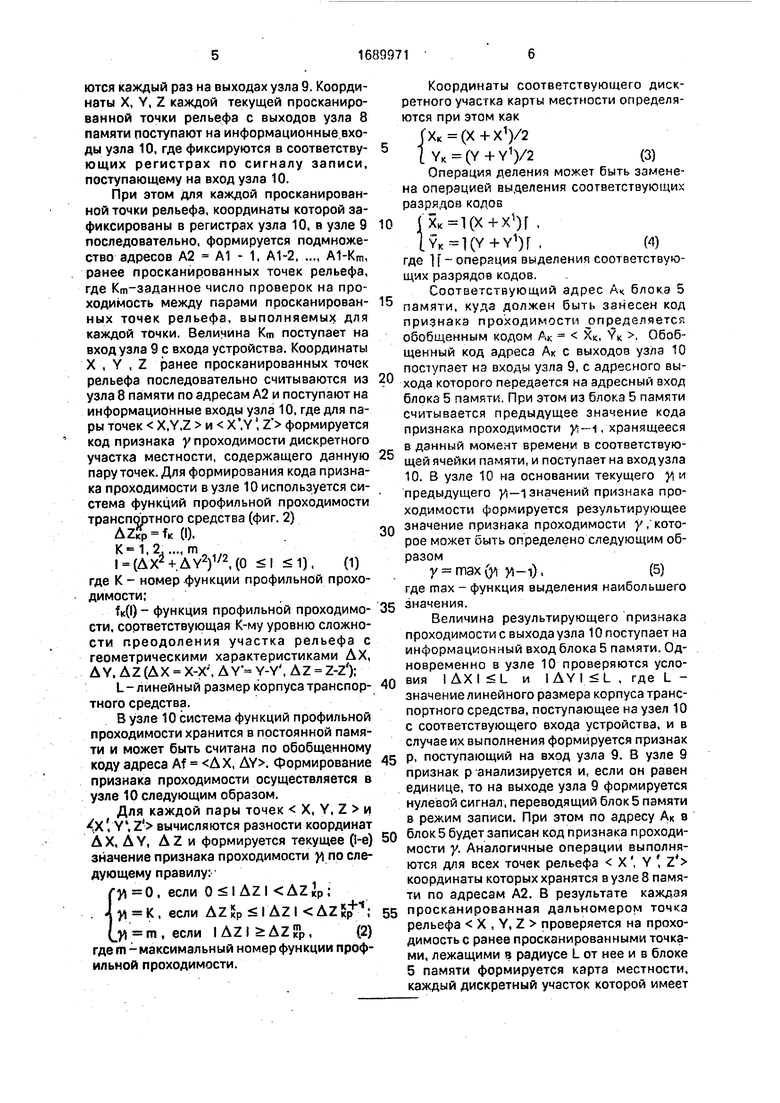
адресам А1 1, 2,,.., Ат8, где Ат8 - максимальное значение адреса, соответствующее последней просканированной дальномером точке рельефа. Соответствующее значение адреса А1 и сигнал записи чтения формируются каждый раз на выходах узла 9. Координаты X, Y, Z каждой текущей просканиро- ванной точки рельефа с выходов узла 8 памяти поступают на информационные входы узла 10, где фиксируются в соответствующих регистрах по сигналу записи, поступающему на вход узла 10.
При этом для каждой просканирован- ной точки рельефа, координаты которой зафиксированы в регистрах узла 10, в узле 9 последовательно, формируется подмножество адресов А2 А1 - 1, А1-2, .„, А1-Кт, ранее просканированных точек рельефа, где Km-заданное число проверок на проходимость между парами просканированных точек рельефа, выполняемых для каждой точки. Величина Кт поступает на вход узла 9 с входа устройства. Координаты X , Y , Z ранее просканированных точек рельефа последовательно считываются из узла 8 памяти по адресам А2 и поступают на информационные входы узла 10, где для пары точек X.Y.Z и X .Y Z формируется код признака у проходимости дискретного участка местности, содержащего данную пару точек. Для формирования кода признака проходимости в узле 10 используется система функций профильной проходимости транспортного средства (фиг. 2)
fK (I),
K-1,2..,.,in м
I (AX2 + AY2)1/2,(0 1), (1) где К - номер функции профильной проходимости;
fic(l) - функция профильной проходимости, соответствующая К-му уровню сложности преодоления участка рельефа с геометрическими характеристиками АХ, A Y. AZ (АХ Х-Х , A Y Y-Y , A Z Z-Z );
L - линейный размер корпуса транспортного средства.
В узле 10 система функций профильной проходимости хранится в постоянной памяти и может быть считана по обобщенному коду адреса Af AX, AY. Формирование признака проходимости осуществляется в узле 10 следующим образом.
Для каждой пары точек X, Y, Z и 4Х Y , Z вычисляются разности координат А X, A Y, A Z и формируется текущее (1-е) зйачение признака проходимости у| по следующему правилу:
, если AZI AZKp; . - , если AZ&p lAZKAZEjf;
т,если ,(2)
где т-максимальный номер функции профильной проходимости.
iijjyi с; turn 1чаг
(Хк(Х+Х1 1 YK (Y + Y1)
0
Координаты соответствующего дискретного участка карты местности определяются при этом как
)/2
)/2(3)
Операция деления может быть заменена операцией выделения соответствующих разрядов кодов
( (х+х1) ,
(Y+Y1)r -И)
где 1 - операция выделения соответствующих разрядоа кодов.
Соответствующий адрес А блока 5 памяти, куда должен быть занесен код признака проходимости определяется обобщенным кодом Ак Хк, YK . Обобщенный код адреса Ак с выходов узла 10 поступает на входы узла 9, с адресного выхода которого передается на адресный вход блока 5 памяти. При этом из блока 5 памяти считывается предыдущее значение кода признака проходимости у;-1, хранящееся в данный момент времени в соответствующей ячейки памяти, и поступает на вход узла 10. В узле 10 на основании текущего yi и предыдущего у,-) значений признака проходимости формируется результирующее
0 значение признака проходимости у,которое может быть определено следующим образом
у max (у, yj-i),(5)
где max - функция выделения наибольшего
5 значения.
Величина результирующего признака проходимости с выхода узла 10 поступает на информационный вход блока 5 памяти. Одновременно в узле 10 проверяются усло0 вия I AX I L и I A Y I L , где L - значение линейного размера корпуса транспортного средства, поступающее на узел 10 с соответствующего входа устройства, и в случае их выполнения формируется признак
5 Р- поступающий на вход узла 9. В узле 9 признак р-анализируется и, если он равен единице, то на выходе узла 9 формируется нулевой сигнал, переводящий блок 5 памяти в режим записи. При этом по адресу Ак в
0 блок 5 будет записан код признака проходимости у. Аналогичные операции выполняются для всех точек рельефа X , Y , Z координаты которых хранятся в узле 8 памяти по адресам А2. В результате каждая
5 просканированная дальномером точка рельефа X , Y, Z проверяется на проходимость с ранее проскэнированными точками, лежащими в радиусе L от нее и в блоке 5 памяти формируется карта местности, каждый дискретный участок которой имеет
либо признак у0 , соответствующий тому факту, что проходимость данного участка рельефа не определена, либо некоторый признак у (у у0), пропорциональный степени сложности преодоления транспорт- ным средством соответствующего участка местности, Значение адреса А1 текущей просканироаанной дальномером точки рельефа непрерывно сравнивается в узле 9 с максимальным значением адреса узла 8 памяти, которое поступает на вхоц узла 9 с соответствующего входа устройства, и при выполнении А1 Ат8 устройство переходит в режим выдачи результата (карты мест IOCTH) во пнешнее устройство.
Режим выдачи результата организуется следующиг.1 образом.
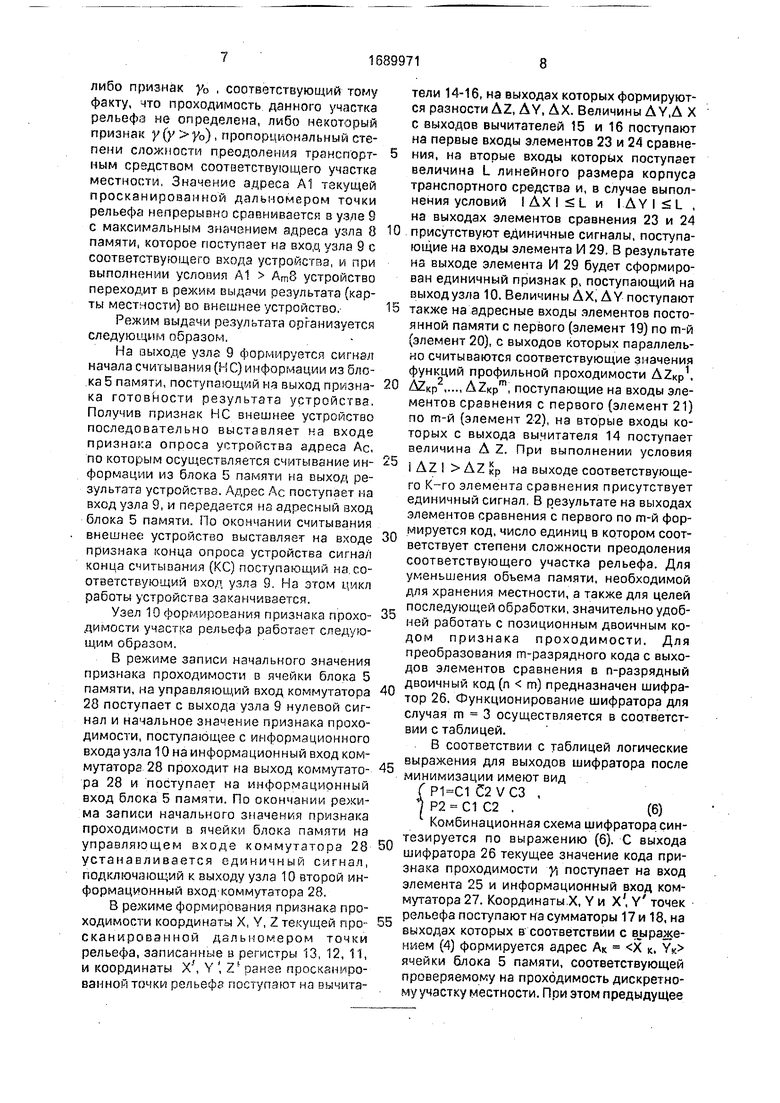
На аыходе узла 9 формируется сигнал начала считывания (НС) информации из блока 5 памяти, поступающий на выход пркзна- ка готовности результата устройства. Получив признак НС внешнее устройство последовательно выставляет на входе признака опроса угтройства адреса Ас, по которым осуществляется считывание ин- формации из блока 5 памяти на выход результата устройства. Адрес Ас поступает па вход узла 9, и передается из адресный вход блока 5 памяти. По окончании считывания внешнее устройство выставляет на входе признака конца опроса устройства сигнал конца считывания (КС) поступающий на соответствующий вход узла 9. На этом никл работы устройства заканчивается.
Узел 10 формирования признака проходимости участка рельефа работает следующим образом.
В режиме записи начального значения признака проходимости в ячейки блока 5 памяти, на управляющий вход коммутатора 20 поступает с выхода узла 9 нулевой сигнал и начальное значение признака проходимости, поступающее с информационного входа узла 10 на информационный вход коммутатора 28 проходит на выход коммутато- ра 28 и поступает на информационный вход блока 5 памяти. По окончании режима записи начального значения признака проходимости в ячейки блока памяти на управляющем входе коммутатора 28 устанавливается единичный сигнап, подключающий к выходу узла 10 второй информационный вход коммутатора 28.
В режиме формирования признака проходимости координаты X, Y, Z текущей про- сканированной дальномером точки рельефа, записанные в регистры 13, 12, 11, и координаты X , Y Z ранзе просканмоо- ванной точки рельефз поступают на вычига
5
0 5
5 0
5
0
5
0
тели 14-16, на выходах которых формируются разности AZ, A Y, АХ. Величины A Y.A X с выходов вычитателей 15 и 16 поступают на первые входы элементов 23 и 24 сравнения, на вторые входы которых поступает величина L линейного размера корпуса транспортного средства и, в случае выполнения условий IДХI L и I A Y I L , на выходах элементов сравнения 23 и 24 присутствуют единичные сигналы, поступающие на входы элемента И 29. В результате на выходе элемента И 29 будет сформирован единичный признак р, поступающий на выход узла 10. Величины АХ, Д Y поступают также на адресные входы элементов постоянной памяти с первого (элемент 19) по т-й (элемент 20), с выходов которых параллельно считываются соответствующие значения функций профильной проходимости Д2Кр1. AZKp AZicp™, поступающие на входы элементов сравнения с первого (элемент 21) по m-й (элемент 22), на вторые входы которых с выхода вычитателя 14 поступает величина A Z. При выполнении условия
i AZ I AZ кр на выходе соответствующего К-го элемента сравнения присутствует единичный сигнал, В результате на выходах элементов сравнения с первого по m-й формируется код, число единиц в котором соответствует степени сложности преодоления соответствующего участка рельефа. Для уменьшения объема памяти, необходимой для хранения местности, а также для целей последующей обработки, значительно удобней работать с позиционным двоичным кодом признака проходимости. Для преобразования m-разрядного кода с выходов элементов сравнения в п-разрядный двоичный код (п т) предназначен шифратор 26. Функционирование шифратора для случая m 3 осуществляется в соответствии с таблицей.
В соответствии с таблицей логические выражения для выходов шифратора после минимизации имеют вид С2 VC3 , 1 Р2 С1 С2 .(6)
Комбинационная схема шифратора синтезируется по выражению (6). С выхода шифратора 26 текущее значение кода признака проходимости у, поступает на вход элемента 25 и информационный вход коммутатора 27. Координаты X, Y и Х , Y точек рельефа поступают на сумматоры 17 и 18, на выходах которых в соответствии с выражением (4) формируется адрес Ак Х к. Y«c ячейки блока 5 памяти, соответствующей проверяемому на проходимость дискретному участку местности. При этом предыдущее
значение кода признака проходимости yi-т, записанное ранее по адресу Ак, считывается из блока 5 памяти и поступает на вход элемента 25 сравнения, где сравнивается с текущим значением yi. В случае выполнения условия yi yi-1 на выходе элемента 25 сравнения формируется единичный сигнал, поступающий на управляющий вход коммутатора 27. В результате текущее значение кода признака проходимости проходит на выход коммутатора 27 и через Коммутатор 28 соответственно на информационный выход узла 10. В случае, если ч , на выходе элемента 25 сравнения присутствует нулевой сигнал и на выход узла 10 приходит код yi-1, подтверждающий информацию, записанную в соответствующей ячейке блока 5 памяти.
Узел 9 микропрограммного управления функционирует следующим образом.
После включения переключателя на работу на выходах 50. 53, подключенных к установочным входам счетчиков 34, 33 и 30, 31 появляется управляющий сигнал, устанавливающий их в исходное нулевое состояние, после чего выполняется начальная установка элементов блока 5 памяти. При этом на выходах 57. 58 автомата 41 выставляется код, подключающий к выходу коммутатора 34 выход счетчика 30, на выходе 48 автомата 41 выставляется сигнал Зап. у0 , поступающий на узел 10 и подключающий к входу блока 5 памяти код начального признака проходимости. Далее -на выходе 45 автомата 41 выставляется сигнал Зап, 5, переводящий блок 5 памяти в режим записи. Содержимое счетчика 30 непрерывно сравнивается на элементе 37 с максимальным значением адреса АН5 и, в случае выполнения условия А Ам5, на выходе автомата 41 формируется управляющий сигнал, наращивающий счетчик 30. В результате перебираются все адреса блока 5 памяти, в элементы которого, соответствующие участкам карты местности, записывается начальное значение уо признака проходимости. При выполнении условия А АМ5 на выходе элемента 37 сравнения появляется единичный признак и узел 9 переходит в режим формирования карты местности.
При этом сигналы Зап. 5, Зап. уь снимаются, на управляющих входах коммутатора 34 устанавливается код, подключающий к адресному входу блока 5 памяти адрес Ак, пр едставляющий собой обобщенный код Хк. YK координат дискретных участков карты, формируемый в соответствии с соотношением (4) в узле 10. В момент
окончания преобразования координат для текущей, проскандированной дальномером точки рельефа, на вход 42 о г узла 7 преобразования координат поступает единичный
признак КП конца преобразования. В автомате 41 признак КП анализируется и, если он равен единице, на выходе 54 формируется сигнал, устанавливающий содержимое счетчика 31 (адрес А1) на единицу. Адрес А1
непрерывно сравнивается на элементе 38 С максимальным значением адреса АМ8 узла 8 памяти, результат сравнения покупает на автомат 41 и, в случае если А1 АМ8, в узле 9 выполняются следующие операции.
На выходе 52 автомата 41 формируется управляющий сигнал, переписывающий содержимое А1 счетчикз 31 в счетчике 32 адреса А2, науправчяющий вход коммутатора 35 с выхода 56 автомата 41 поступает сигнал, подключающий к адресному входу узла 8 памяти адрес А1, на выходе 46 формируется сигнал Зап. 8, обеспечивающий запись координат X, Y, Z текущей просканирован- ной точки рельефа с выходов узла 7 в узел 8
памяти по адресу А1. Далее сигнал Зап. 8 снимается, узел 8 памяти переводится в режим считывания, и на выходе 47 автомата 41 формируется сигнал Зап. Рг, поступаю щий на узел 10 и обеспечивающий запись
оординзт X, Y, Z текущей просканирован- ной точки рельефа в регистры узла 10. После этого на выходе 52 формируется управляющий сигнал, поступающий на счетные входы счетчиков 32 и 33. В результате содержимое
счетчика 33 числа проверок на проходимость, выполняемых для текущей проска- нированной точки рельефа с ранее просканированными точками увеличивается, а содержимое счетчика 32 адресов ранее
просканированных точек рельефа уменьшается на единицу. На управляющем входе коммутатора 35 устанавливается при этом сигнал, подключающий к адресному входу узла 8 памяти адрес А2 с выхода счетчика 32,
из узла b памяти считываются координаты X, Y, Z просканированной ранее точки рельефа и поступают в узел 10 формирования признака проходимости, где формируются адрес Ак Хк, YK блока 5 памяти, признак Р, характеризующий принадлежность текущей пары точек X, Y, Z , X , Y , Z к области классификации (Р 1, если I ДХ I L. I AY К L , где L - линейный размер корпуса транспортного средства) и
признак у , характеризующий проходимость дискретногс участка карты местности с координатами Хк, YK .
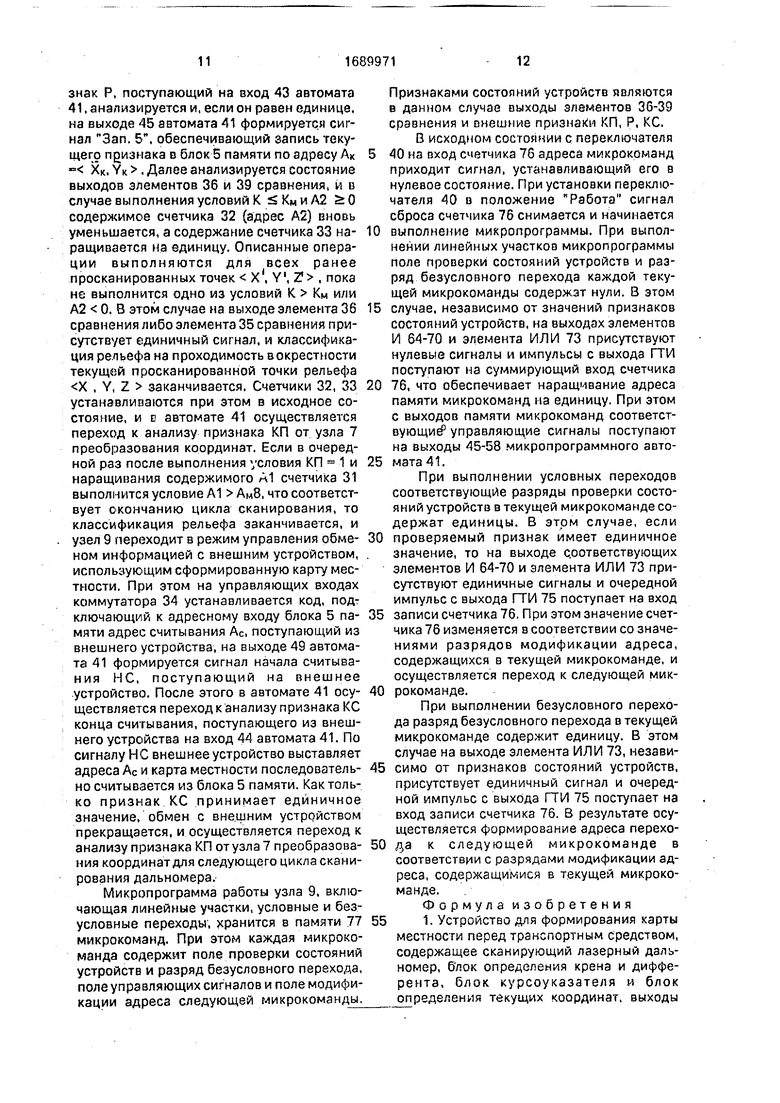
С задержкой, обеспечивающей завершение выполнения операций в узле 10, признак Р, поступающий на вход 43 автомата 41, анализируется и, если он равен единице, на выходе 45 автомата 41 формируется сигнал Зап. 5я, обеспечивающий запись текущего признака в блок 5 памяти по адресу А Хк, YK . Далее анализируется состояние выходов элементов 36 и 39 сравнения, и в случае выполнения условий К йКмиА2 5:0 содержимое счетчика 32 (адрес А2) вновь уменьшается, а содержание счетчика 33 наращивается на единицу. Описанные операции выполняются для всех ранее просканированных точек X1, Y1, 2 , пока не выполнится одно из условий К Км или А2 0. В этом случае на выходе элемента 36 сравнения либо элемента 35 сравнения присутствует единичный сигнал, и классификация репьефа на проходимость в окрестности текущей просканированной точки рельефа Х , Y, Z заканчивается. Счетчики 32, 33 устанэвлипаются при этом в исходное состояние, и Е автомате 41 осуществляется переход к анализу признака КП от узла 7 преобразования координат. Если в очередной раз после выполнения условия КП 1 и наращивания содержимого А1 счетчика 31 выполнится условие А1 АМ8, что соответствует окончанию цикла сканирования, то классификация рельефа заканчивается, и узел 9 переходит в режим управления обменом информацией с внешним устройством, использующим сформированную карту местности. При этом на управляющих входах коммутатора 34 устанавливается код, подключающий к адресному входу блока 5 памяти адрес считывания Ас, поступающий из внешнего устройства, на выходе 49 автомата 41 формируется сигнал начала считывания НС, поступающий на внешнее устройство. После этого в автомате 41 осуществляется переход к анализу признака КС конца считывания, поступающего из внешнего устройства на вход 44 автомата 41. По сигналу НС внешнее устройство выставляет адреса Ас и карта местности последовательно считывается из блока 5 памяти. Как только признак КС принимает единичное значение, обмен с внешним устройством прекращается, и осуществляется переход к анализу признака КП от узла 7 преобразования координат для следующего цикла сканирования дальномера.
Микропрограмма работы узла 9, включающая линейные участки, условные и безусловные переходы, хранится в памяти 77 микрокоманд. При этом каждая микрокоманда содержит поле проверки состояний устройств и разряд безусловного перехода, поле управляющих сигналов и поле модификации адреса следующей микрокоманды.
Признаками состояний устройств валяются в данном случае выходы элементов 36-39 сравнения и внешние признаки КП, Р, КС. В исходном состоянии с переключателя
40 на оход счетчика 76 адреса микрокоманд приходит сигнал, устанавливающий его в нулевое состояние. При установки переключателя 40 в положение Работа сигнал сброса счетчика 76 снимается и начинается
0 выполнение микропрограммы. При выполнении линейных участков микропрограммы поле проверки состояний устройств и разряд безусловного перехода каждой текущей микрокоманды содержат нули. В этом
5 случае, независимо от значений признаков состояний устройств, на выходах элементов И 64-70 и элемента ИЛИ 73 присутствуют нулевые сигналы и импульсы с выхода ГТИ поступают на суммирующий вход счетчика
0 76, что обеспечивает наращивание адреса памяти микрокоманд на единицу. При этом с выходов памяти микрокоманд соответствующие управляющие сигналы поступают на выходы 45-58 микропрограммного авто5 мата 41.
При выполнении условных переходов соответствующие разряды проверки состояний устройств в текущей микрокоманде содержат единицы. В этом случае, если
0 проверяемый признак имеет единичное значение, то на выходе соответствующих элементов И 64-70 и элемента ИЛИ 73 присутствуют единичные сигналы и очередной импульс с выхода ГТИ 75 поступает на вход
5 записи счетчика 76. При этом значение счетчика 76 изменяется в соответствии со значе- ниями разрядов модификации адреса, содержащихся в текущей микрокоманде, и осуществляется переход к следующей мик0 рокоманде.
При выполнении безусловного перехода разряд безусловного перехода в текущей микрокоманде содержит единицу. В этом случае на выходе элемента ИЛИ 73, незави5 симо от признаков состояний устройств, присутствует единичный сигнал и очередной импульс с выхода ГТИ 75 поступает на вход записи счетчика 76. В результате осуществляется формирование адреса перехо0 да к следующей микрокоманде в соответствии с разрядами модификации адреса, содержащимися в текущей микрокоманде.
Формула изобретения
5 1. Устройство для формирования карты местности перед транспортным средством, содержащее сканирующий лазерный дальномер, б лок определения крена и дифферента, блок курсоуказателя и блок определения текущих координат, выходы
которых соединены с соответствующими входами узла преобразования координат, вход признака опроса устройства соединен с адресным входом узла микропрограммного управления, вход признака конца опроса устройства соединен с входом конца считывания узла микропрограммного управления, входы первой, второй и третий констант узла микропрограммного управления соединены с входом заданного числа проверок устройства, входом значения адреса устройства и с входом максимального значения адреса устройства соответственно, выход признака начала считывания узла микропрограммного управления соединен с выходом признака готовности результата устройства, вход записи чтения и адресный вход блока памяти соединен с выходом записи чтения и адресным выходом узла микропрограммного управления соот- ветственно, выход блскз памяти подключен к выходу результата устройства, информационные выходы узла преобразования координат соединены с информационными входами узла памяти соответственно, а вы- ход признака конца преобразования соединен с входом признака режима узла микропрограммного управления, адресный вход и вход записи чтения узла памяти соединены с соответствующими выходами узла микропрограммного управления, отличающееся тем, что, с целью расширения функциональных возможностей за счет обеспечения каждого дискретного участка карты признаком, пропорциональным сте- пени сложности преодоления данного участка транспортным средством, в него введен узел формирования признака проходимости участка рельефа, информационные входы которого с первого по шестой соеди- йены с первым, вторым и третьим выходами координат узла памяти, с входом начапьно- го значения признака проходимости устройства, с входом значения линейного размера корпуса устройства и с выходом блока памя- ти соответственно, выход результирующего признака проходимости соединен с информационным входом блока памяти, первый и второй выходы обобщенного адреса, выход признака записи чтения, первый и второй входы разрешения записи узла формирования признака проходимости участка рельефа соединены с первым и вторым входами обобщенного адреса, с входом разрешения записи чтения и с первым и вторым выхо- дами разрешения записи узла микропрограммного управления соответственно.
2. Устройство по п. 1, о т л и ч а ю щ е е- е я тем, что узел формирования признака проходимости участка рельефа содержит
три регистра, три вычитателя, m элементов постоянной памяти (m+3)-ro элемента сравнения, два коммутатора, два сумматора, шифратор и элемент И, причем первый информационный вход узла подключен к информационному входу первого регистра и к первым информационным входам первого сумматюрэ и первого вычитятеля, выход регистра подключен к вторым входам первого сумматора и п°рвогс вычитзтеля. второй информационный вход узла соединен с информационным входом второго регистра, с песпыми входами второго .мзтор з и второго Еычятателя, выход второго регистра со- едипе с вторыми входами второго сумматора и второго вычитателя, третий информационный вход узла соединен с информационным входом третьего регистра и с первым входом третьего вычитателя, второй вход которого соединен с выходом третьего регистра, входы записи первого, второго и третьего регистров соединены с первым входом разрешения записи узла, второй вход разрешения записи которого под- ключен к управляющему входу первого коммутатора, выход третьего вычитателя подключен к первым входам элементов сравнения с первого по m-й, выход второго вычитателя подключен к. первым адресным входам элементов постоянной памяти с первого по m-й и к первому входу (т+1)-го элемента сравнения, выход первого вычитателя подключен к вторым адресным входам элементов постоянной памяти с первого по m-й и к первому входу (гп42)-го элемента сравнения, вторые входы (гп+1)- и (ггн-2)-го элементов сравнения подключены к пятому информационному входу узла, первый вход (m+3)-ro элемента сравнения и первый информационный вход второго коммутатора подключены к шестому информационному входу узла, первый информационный вход первого коммутатора является четвертым информационным входом узла, выходы (т+1)- и (т+2)-го элементов сравнения подключены к первому и второму входам элементов И соответственно, выход которого является выходом признака записи чтения узла, выходы первого и второго сумматоров соединены с первым и вторым выходами обобщенного адреса узла соответственно, выходы элементов постоянной памяти, с первого по m-й подключены к вторым входам элементов сравнений с первого по m-й соответственно, выходы элементов сравнения с первого по m-й соединены с входами шифратора соответственно, выход которого соединен с вторым входом (пи-3)-го элемента сравнения и с вторым информационным входом второго коммутатоpa, управляющий вход которого соединен с му входу первого коммутатора, выход кото- выходом (m+3)-ro элемента сравнения, а вы- рого является выходом результирующего ход подключен к второму информационно- признака проходимости.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования плана проходимости местности перед транспортным средством | 1988 |
|
SU1562933A1 |
| Устройство для сопряжения электронно-вычислительной машины с группой внешних устройств | 1985 |
|
SU1278866A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2046395C1 |
| Арбитр мультипроцессорной системы | 1984 |
|
SU1254494A1 |
| Устройство для контроля цифровых блоков | 1988 |
|
SU1661768A1 |
| Устройство синтаксически управляемого перевода | 1986 |
|
SU1399767A1 |
| Устройство для моделирования алгоритма деятельности человека-оператора | 1989 |
|
SU1621042A1 |
| Микропрограммное устройство управления | 1987 |
|
SU1490676A1 |
| Мультимикропрограммная управляющая система | 1983 |
|
SU1133594A1 |
| Устройство для тестового контроля цифровых блоков | 1986 |
|
SU1345199A2 |

Изобретение относится к вычислительной технике и может быть использовано для определения профильной проходимости местности перед автономными транспортными средствами, функционирующими в априори неизвестной внешней среде с препятствиями. Целью изобретения является расширение функциональных возможностей за счет обеспечения каждого дискретного участка карты признаком, пропорциональным степени сложности преодоления данного участка транспортным средством. .Устройство содержит сканирующий лазерный дальномер 1, блок 2 определения крена и дифферента, блок 3 курсоуказателя, блок 4 определения текущих координат, блок 5 памяти, блок 6 обработки, состоящий из узла 7 преобразования координат, узла 8 памяти, узла 9 микропрограммного управления и узла 10 формирования проходимости участка рельефа, 1 з.п.ф-лы, 5 ил. 1 табл. V W Н
П п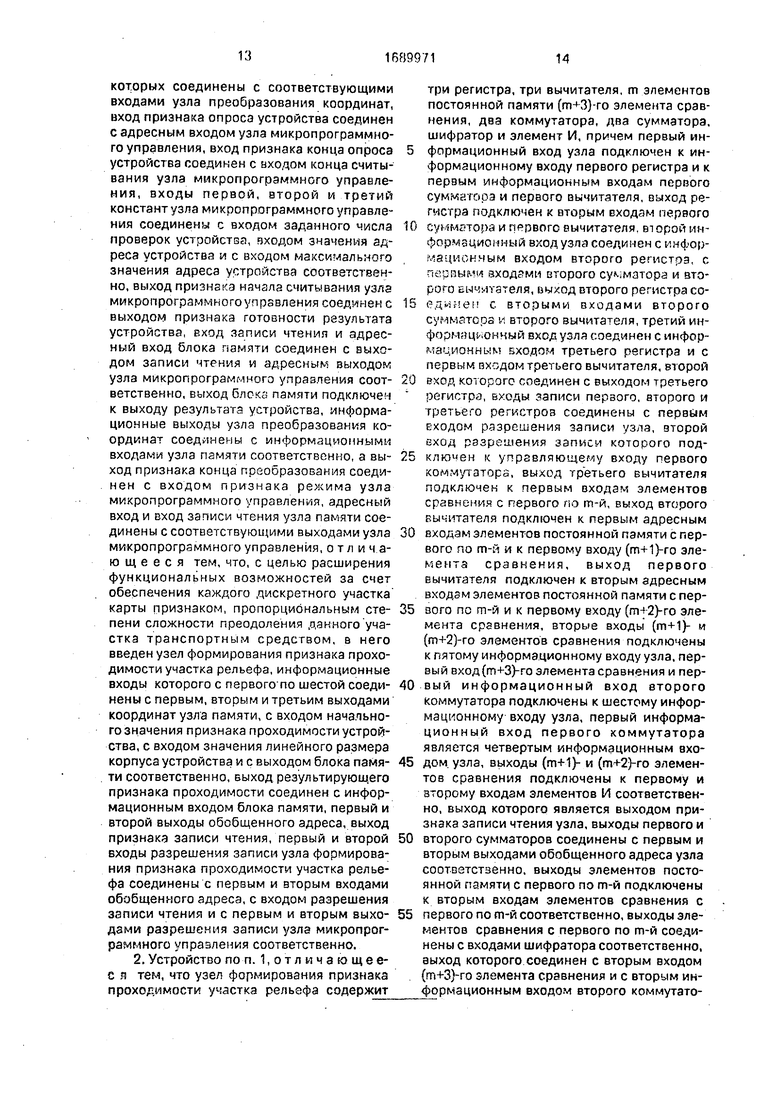
| Пупков К.А., Жуков С.А | |||
| и др | |||
| Алгоритмическое и программное обеспечение автономного транспортного робота | |||
| - Информационные и управляющие системы роботов: Сборник научных трудов | |||
| / Под ред | |||
| Д.Е.Охоцимского, М. | |||
| ИПМ АН СССР, 1982, с | |||
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
| Устройство для формирования плана проходимости местности перед транспортным средством | 1988 |
|
SU1562933A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
