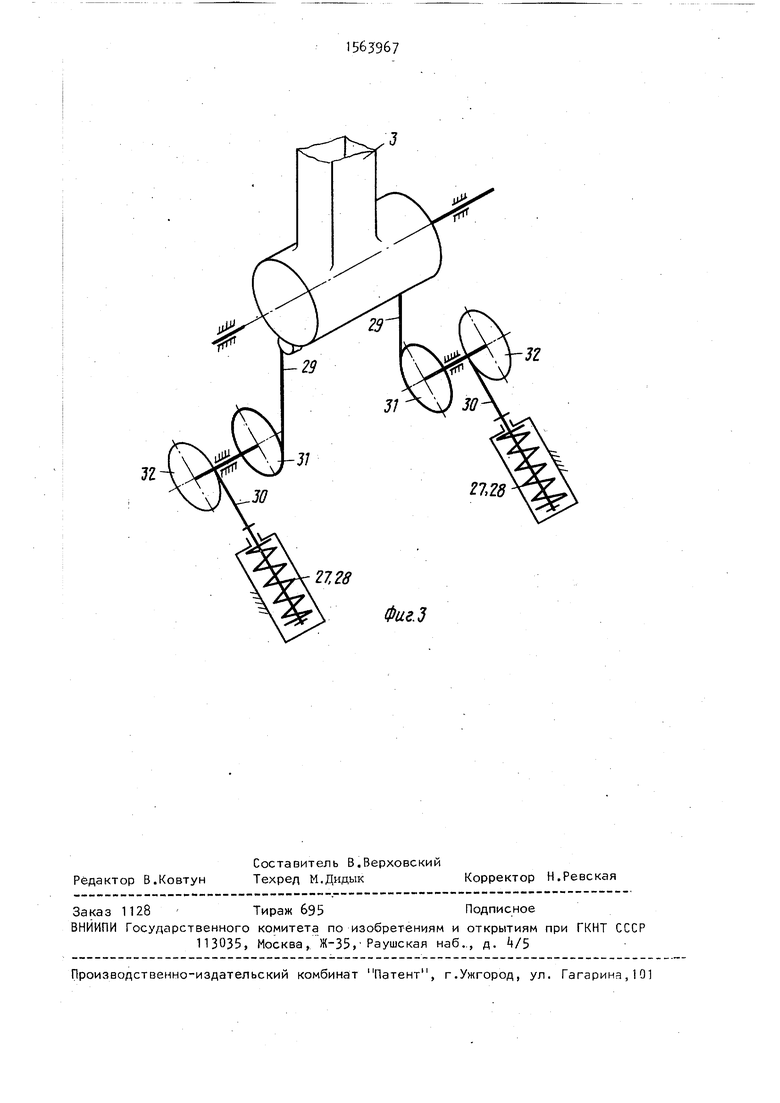
фиг. 2
себе манипулятор, шарнирно соединенный с ней своим входным звеном, установлен на основании 1. По сигналу системы управления вал двигателя 7 при- вода платформы приводит ее во вращение посредством волнового редуктора Одновременно датчик 22 скорости платформы, жестко установленный на ней и кинематически связанный с двигателем Q 7, выдает информацию о скорости платформы в систему управления, которая уменьшает колебания угловой скорости с помощью обратной связи по скорости.
1563967
При перемещении входного звена манипулятора шарнирно соединенные с ним гибкие элементы основного и дополнительного механизмов уравновешивания деформируют пружины этих механизмов, жестко закрепленные на платформе. Шарниры крепления этих гибких элементов к входному звену расположены симметрично относительно оси поворота платформы, в результате чего обеспечивается симметрия силовой характеристики механизмов уравновешивания, 3 ил.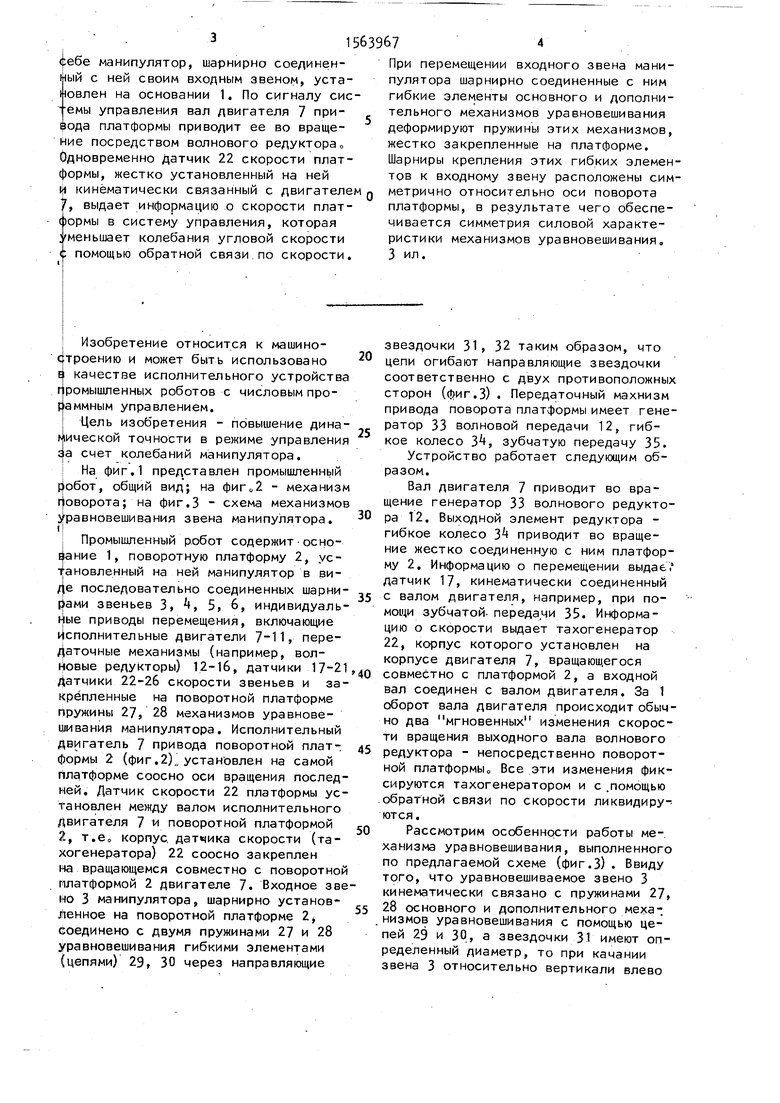
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1085804A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Устройство для имитации модуля поворота | 1989 |
|
SU1705063A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Промышленный робот | 1989 |
|
SU1673428A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| Привод поперечного перемещения адаптивной сварочной горелки | 1982 |
|
SU1065120A1 |
Изобретение относится к машиностроению и может быть использовано в качестве исполнительного устройства промышленных роботов с числовым программным управлением. Цель изобретения - повышение динамической точности в режиме контурного управления за счет исключения колебаний манипулятора. Поворотная платформа 2, несущая на себе манипулятор, шарнирно соединенный с ней своим входным звеном, установлен на основании 1. По сигналу системы управления вал двигателя 7 привода платформы приводит ее во вращение посредством волнового редуктора. Одновременно датчик 22 скорости платформы, жестко установленный на ней и кинематически связанный с двигателем 7, выдает информацию о скорости платформы в систему управления, которая уменьшает колебания угловой скорости с помощью обратной связи по скорости. При перемещении входного звена манипулятора шарнирно соединенные с ним гибкие элементы основного и дополнительного механизмов уравновешивания деформируют пружины этих механизмов, жестко закрепленные на платформе. Шарниры крепления этих гибких элементов к входному звену расположены симметрично относительно оси поворота платформы, в результате чего обеспечивается симметрия силовой характеристики механизмов уравновешивания. 3 ил.
Изобретение относится к машиностроению и может быть использовано в качестве исполнительного устройства промышленных роботов с числовым про- раммным управлением.
Цель изобретения - повышение динамической точности в режиме управления за счет колебаний манипулятора.
На фиг.1 представлен промышленный робот, общий вид; на фиг«2 - механизм поворота; на фиг.З - схема механизмов
уравновешивания звена манипулятора. (
Промышленный робот содержит основание 1, поворотную платформу 2, установленный на ней манипулятор в виде последовательно соединенных шарнирами звеньев 3, , 5, 6, индивидуальные приводы перемещения, включающие исполнительные двигатели 7-11, передаточные механизмы (например, волновые редукторы) 12-16, датчики 17-21 датчики 22-26 скорости звеньев и закрепленные на поворотной платформе пружины 27, 28 механизмов уравновешивания манипулятора. Исполнительный двигатель 7 привода поворотной платформы 2 (фиг.2), установлен на самой платформе соосно оси вращения последней. Датчик скорости 22 платформы установлен между валом исполнительного двигателя 7 и поворотной платформой 2, т.е„ корпус датчика скорости (та- хогенератора) 22 соосно закреплен на вращающемся совместно с поворотной платформой 2 двигателе 7. Входное зве но 3 манипулятора, шарнирно установленное на поворотной платформе 2, соединено с двумя пружинами 27 и 28 уравновешивания гибкими элементами (цепями) 29, 30 через направляющие
0
5
0
5
О
45
50
5
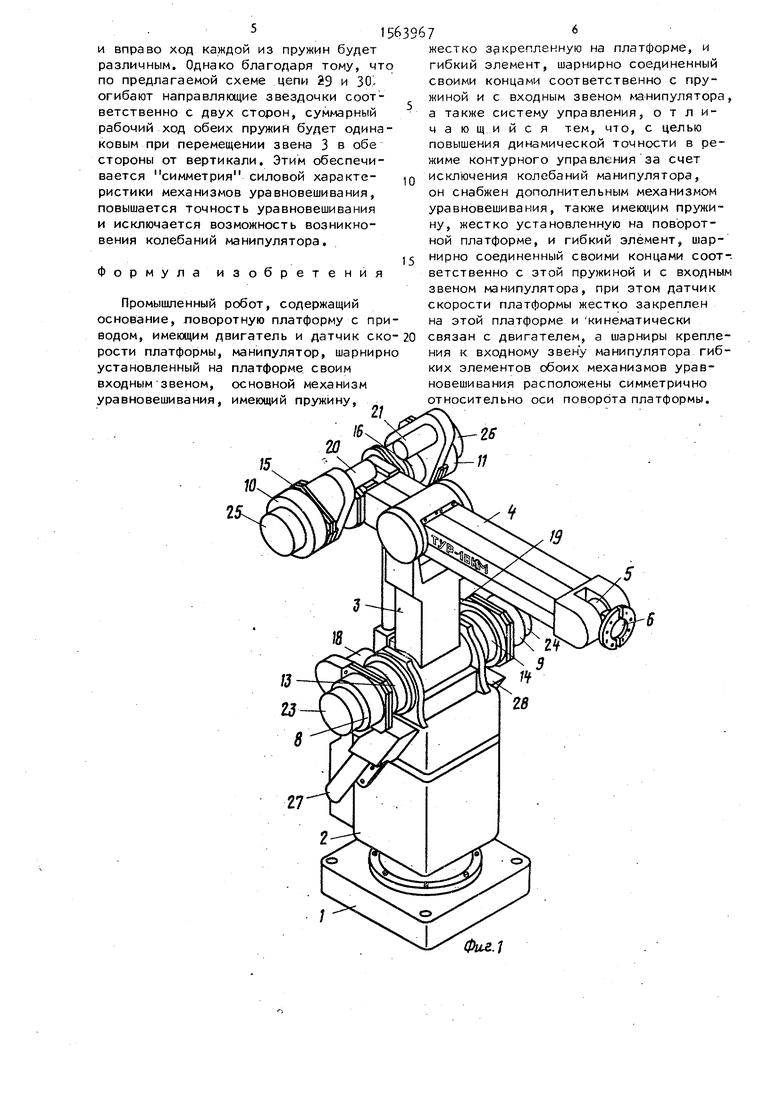
звездочки 31, 32 таким образом, что цепи огибают направляющие звездочки соответственно с двух противоположных сторон (фиг.З) . Передаточный махнизм привода поворота платформы имеет генератор 33 волновой передачи 12, гибкое колесо З1, зубчатую передачу 35.
Устройство работает следующим образом.
Вал двигателя 7 приводит во вращение генератор 33 волнового редуктора 12. Выходной элемент редуктора - гибкое колесо 3 приводит во вращение жестко соединенную с ним платформу 2. Информацию о перемещении выдае датчик 17, кинематически соединенный с валом двигателя, например, при помощи зубчатой, передали 35. Информацию о скорости выдает тахогенератор 22, корпус которого установлен на корпусе двигателя 7, вращающегося совместно с платформой 2, а входной вал соединен с валом двигателя. За 1 оборот вала двигателя происходит обычно два мгновенных изменения скорости вращения выходного вала волнового редуктора - непосредственно поворотной платформыо Все эти изменения фиксируются тахогенератором и с .помощью обратной связи по скорости ликвидируются.
Рассмотрим особенности работы механизма уравновешивания, выполненного по предлагаемой схеме (фиг.З). Ввиду того, что уравновешиваемое звено 3 кинематически связано с пружинами 27, 28 основного и дополнительного меха-. .низмов уравновешивания с помощью цепей 29 и 30, а звездочки 31 имеют определенный диаметр, то при качании звена 3 относительно вертикали влево
и вправо ход каждой из пружин будет различным. Однако благодаря тому, что по предлагаемой схеме цепи 29 и 30- огибают направляющие звездочки соответственно с двух сторон, суммарный рабочий ход обеих пружин будет одинаковым при перемещении звена 3 в обе стороны от вертикали. Этим обеспечивается симметрия силовой характеристики механизмов уравновешивания, повышается точность уравновешивания и исключается возможность возникновения колебаний манипулятора.
Формула изобретения
Промышленный робот, содержащий основание, ловоротную платформу с приводом, имеющим двигатель и датчик ско- рости платформы, манипулятор, шарнирно установленный на платформе своим входным звеном, основной механизм уравновешивания, имеющий пружину,
16
20 /5. 10
27
0
5
0
жестко закрепленную на платформе, и гибкий элемент, шарнирно соединенный своими концами соответственно с пружиной и с входным звеном манипулятора, а также систему управления, отличающийся тем, что, с целью повышения динамической точности в режиме контурного управления за счет исключения колебаний манипулятора, он снабжен дополнительным механизмом уравновешивания, также имеющим пружину, жестко установленную на поворотной платформе, и гибкий элемент, шарнирно соединенный своими концами соответственно с этой пружиной и с входным звеном манипулятора, при этом датчик скорости платформы жестко закреплен на этой платформе и кинематически связан с двигателем, а шарниры крепления к входному звену манипулятора гибких элементов обоих механизмов уравновешивания расположены симметрично относительно оси поворота платформы.
Фие.1
rC
32
Фиг.З
| Приборы и системы управления, 1984, № 5, с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
