3
11
(Л
с:
ю
Изобретение относится к машиностроению, в частности к промьшшенным роботам для автоматизации технологи- аеских операций.
Цель изобретения - расширение функциональных возможностей за счет увеличения зоны обслуживания и повышение жесткости.
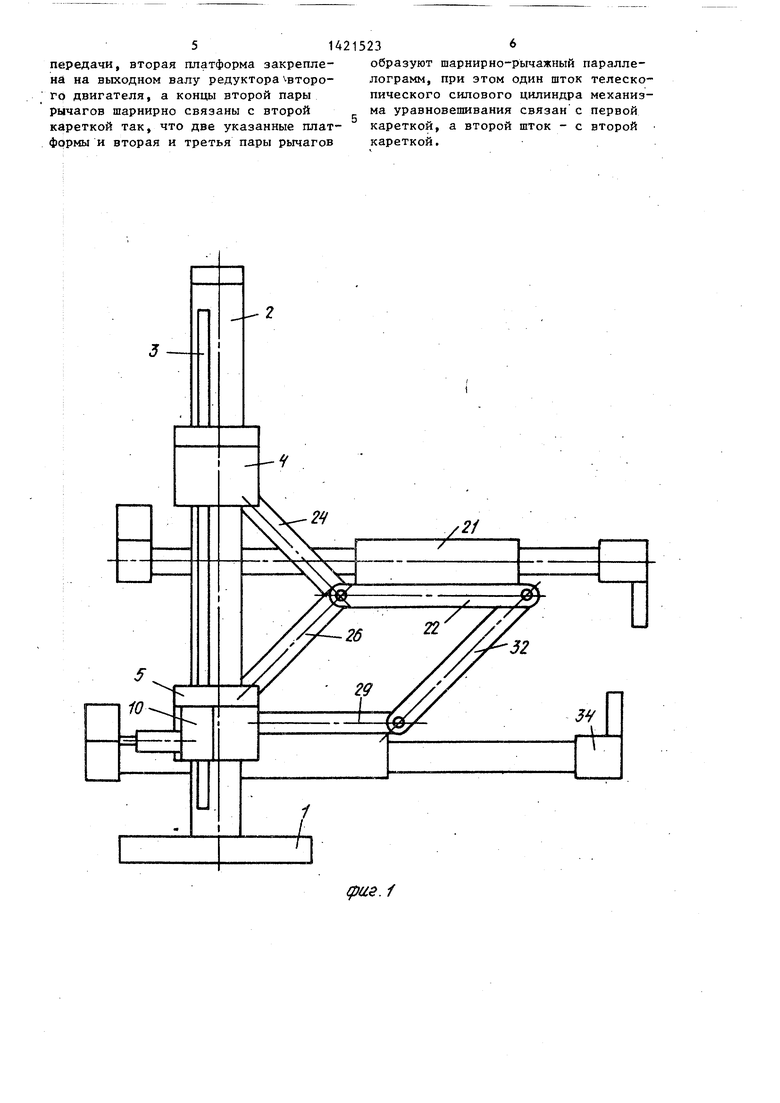
На фиг. 1 представлен робот с консольным расположением основания, ;общий вид на фиг. 2 - кинематичес- кая схема робота с консольным рдспо- ложением основания; -на фиг, 3 - портальная компрновка робота} на фиг. 4 - робот с симметричным расположением платформы, общий вид; н а фиг. 5 - ки- ;нематическая схема робота с ciiMMeT- ричным расположением платформы.
Робот состоит из основания 1 с двумя прямолинейными направляющими 2, с одной из который жестко связана рейка 3, и на направляющих 2 установ лены каретки 4 и, 5, в которых на осях 6 установлены волновые редукторы 7, через зубчато-ременную передачу 8 связанные с двигателями 9. На каретке 5 установлен механизм 10 прямолинейного перемещения, зубчатое колесо 11 которого связано с рейкой 3. С основанием 1 жестко связана шаровая опора 12, элемент 13 кото- рой жестко связан с корпусом 14 уравновешивающего цилиндра 15. В корпусе
При параллельном переносе верхней руки в плоскости, перпендикулярной прямолинейным направляющим, механизм 10 прямолинейного перемещения и волновой редуктор 7, установленный на каретке 5, находятся в не14 установлен плунжер 16, в котором
размещен шток 17. Плунжер 16 через шаре-35 подвижном состоянии, а на двигатель вую опору 18 связан с кареткой 5, а шток ; 9 установленный на каретке 4, пода- 17 через шаровую опору 19 и соединение 20 - с кареткой 4. Рука 21 установлена на платформе 22, которая связана, с выходным валом 23 волнового 40 редуктора 7 на каретке 4 парой рычагов 24.
Рычаги 24 через подшипники 25 связаны с платформой 22. Пара рычагов 26 через подшипники 27 и 28 свя- 45 зана с платформой 22 и осью 6 каретки 5. Вторая платформа 29 жестко связана с концами выходного вала 30 волнового редуктора 7, смонтированного на каретке 5, и через подшипни- JQ ки 31 - с двумя рычагами 32, которые через подшипники 33 связаны с платформой 22. На платформе 29 установлена рука 34.
На фиг. 5 платформа 29 жестко 55 связана с концами выходного вала 30,
ется энергоноситель, в результате чего вращение от двигателя 9 через зубчато-ремеаную передачу 8 подается на волновой.редуктор 7, выходной вал 23 которого начинает поворачивать рычаги 24, которые через подшипники 25 перемещают платформу 22 в плоскос ти, -перпендикулярной прямолинейньм направляющим, при этом происходит удаление платформы 22 с рукой 21 от направляющих 2. Одновременно с этим платформа 22 с рукой 21 перемещаются вдоль направляюш 1Х 2, каретка 4 также перемещается вдоль направляющих 2. За счет введения рычагов 32 и 26 и платформы 29 происходит параллельный перенос платформь 22 и руки 21. При переносе верхней руки вдоль линии, перпендикулярной прямолинейным направляющим, и нижней руки вдоль прямолинейных направляющих па- раллельно самой себе, двигатель 9, установленный на каретке 5, отключен
причем платформа 29 установлена симметрично относительно вала 30. Рычаги 26 через подшипники 35 связаны
0
5
0
5
0
с платформой 29, а рычаги 24 через подшипники 36 - с платформой 22, причем подшипники 36 расположены симметрично относительно платформы 22. На фиг., 3 робот установлен направляющими на колонны 37, а с кареткой 5 .че1)ез шаровую опору 38 связан корпус 39 цилиндра 40, шток 41 которого через шаровую опору 42 связан с ка- реткой 4.
Робот работает следующим образом.
Для перемещения рук вдоль направляющих включается механизм 10 прямо- линейного перемещения и его колесо 11 начинает вращаться и за счет его сцепления с рейкой 3 механизм 10 прямолинейного перемещения и каретка 5 перемещаются вдоль направляюш 1х 2, при этом между каретками 4 и 5 посредством пар рычагов 24 и 26 платформ 22 и 29 волновых редукторов 7 устанавливается жесткая связь и каретка 4 вместе с платформами 22 и 29 и установленными на них руками 21 и 34 также перемещаются вдоль направ- ляюш1их 2. Таким образом происходит параллельный перенос рук 21 и 34 вдоль прямолинейных направляющих 2.
При параллельном переносе верхней руки в плоскости, перпендикулярной прямолинейным направляющим, механизм 10 прямолинейного перемещения и волновой редуктор 7, установленный на каретке 5, находятся в не5 подвижном состоянии, а на двигатель 9 установленный на каретке 4, пода- 0
подвижном состоянии, а на двигатель 9 установленный на каретке 4, пода-
ется энергоноситель, в результате чего вращение от двигателя 9 через зубчато-ремеаную передачу 8 подается на волновой.редуктор 7, выходной вал 23 которого начинает поворачивать рычаги 24, которые через подшипники 25 перемещают платформу 22 в плоскости, -перпендикулярной прямолинейньм направляющим, при этом происходит удаление платформы 22 с рукой 21 от направляющих 2. Одновременно с этим платформа 22 с рукой 21 перемещаются вдоль направляюш 1Х 2, каретка 4 также перемещается вдоль направляющих 2. За счет введения рычагов 32 и 26 и платформы 29 происходит параллельный перенос платформь 22 и руки 21. При переносе верхней руки вдоль линии, перпендикулярной прямолинейным направляющим, и нижней руки вдоль прямолинейных направляющих па- раллельно самой себе, двигатель 9, установленный на каретке 5, отключен
а на двигатель 9, установленный на каретке А, и на механизм 10 прямолинейного перемещения подается энергоноситель, вследствие чего колесо 11 и вал 23 начинают вращаться, причем направление вращения у них противоположное. Рычаги 24, 26 и 32 воздействуют на платформу 22 и перемещают ее вдоль линии, перпендикулярной направляющим 2, т.е. происходит радиальное перемещение.
В режиме качания рук двигатель 9 каретки 4 и механизм 10 прямолинейного перемещения отключены, а на двигатель 9, установленный на каретке 5, подается энергоноситель, в результате чего выходной вал 30 волнового редуктора 7 начинает вращаться, при этом поворачивается платформа 29, которая через рычаги 32 поворачивает платформу 22, при этом происходит качание платформы 29 с рукой 34 относительно оси 6 каретки 5 и качание платформы 22 с рукой 21 относительно оси подшипников 36 (фиг. 5) и относительно оси подшипников 27 и 25 (фиг. 2). Для переноса верхней руки вдоль линии, расположенной под углом к прямолинейным направляющим, механизм 10 прямолинейного перемещения отключается, а на двига.тели 9 подается энергоноситель, в результате чего вращаются выходные валы 23 и 30 и платформа 22 вместе с рукой 21 перемещаются поступательно.
Уравновешивающий цилиндр работает следующим образом. .
При неподвижном положении кареток 4 и 5 энергоноситель поступает в бесплунжерную часть -корпуса 14 И бесштоковую часть плунжера 16, при этом происходит уравновешивание каретки 4 и 5 от действия массы конструкции. При перемещении каретки 5 происходит перемещение плунжера 16 относительно корпуса 14, а при перемещении каретки 4 происходит перемещение штока 17 относительно плунжера 16. При движении кареток 4 и 5 корпус 14 вместе с плунжером 16 качаются относительно осей симметрии шаровых опор 12 и 18, а шток 17 качается относительно осей симметрии шаровой опоры 19 и оси 43, которая при этом перемещается.
Работа . манипулятора портальной компоновки (фиг. 3) происходит аналогично работе манипулятора на фиг. 1 и 2, при этом цилиндр 40, его
корпус 39 и шток 41 качаются при движении кареток 4 и 5 относительно осей симметрии щаровых опор 38 к 42. Работа манипулятора с симметрич- iuiM расположением платформы (фиг. 4 и 5) происходит аналогично работе манипулятора с консолью расположенной платформой 29. При этом за счет симметричного прикладывания движущих моментов к платформам 22 и 29, т.е. симметричного расположения платформы 29 относительно вала 30, конструкция манипулятора более сбалансирована, чем конструкция- на
фиг. 1 и 2,
Формула изобретения
Промьгашенный робот, содержащий основание с направляющими, первую платформу, на которой смонтирована механическая рука, механизм перемещения этой платформы относи тельно основания, содержащий две каретки, размещенные в направляющих основания, две пары рычагов, причем рычаги первой и второй пар с одной стороны связаны с соответствующими
первой и второй из указанных кареток, g с другой стороны их концы объединены общим шарниром, при этом указанная платформа шарнирно связана с этими рычагами, а также механизм
уравновешивания, привод кареток и систему управления, о т л и ч а ю- щ и и с я тем, что, с целью расширения функциональньк возможностей за счет увеличения зоны обслуживаНИН и Повышения жесткости, он снабжен второй платформой и шарнирнр связанной с ней и с первой платформой третьей парой рычагов, приводы - кареток выполнены в виде трех двигателей с редукторами, а механизм уравновешивания выполнен в виде щарнирно смонтированного на основании телескопического силового цилиндра, в корпусе которого размещены два штока,
при этом первый двигатель с редуктором установлен на первой каретке и концы первой пары рычагов закреплены на выходном валу этого редуктора, второй и третий двигатели с соответствующими редукторами установлены на второй каретке, причем третий двигатель с редуктором кинематически связан с основанием с помощью дополнительно введенной зубчато-реечной
передачи, вторая платформа закреплена на выходном валу редуктора второ- го двигателя, а концы второй пары рычагов шарнирно связаны с второй кареткой так, что два указанные платформы и вторая и третья пары рычагов
образуют шарнирно-рычажный параллелограмм, при этом один шток телескопического силового цилиндра механизма уравновешивания связан с первой кареткой, а второй шток - с второй кареткой.

| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Манипулятор | 1977 |
|
SU738866A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Рука манипулятора | 1985 |
|
SU1337253A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Портал промышленного робота | 1983 |
|
SU1135637A1 |



дзаз. /
40
згД1.5
И
X
|.дд , г.
-jr
фи9.5
| Промьшленная робототехника./Под ред | |||
| Я.А | |||
| Шифрина | |||
| - М.: Машиностроение, 1982, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
