Изобретение огносигся к ектрообор - ;оь-аьию транспортннл средств с элекгротя- lo/i I быть использовано на контакт- i.iix pv личных злектрозозах
Цель смм я пгв.лшение надежное гг
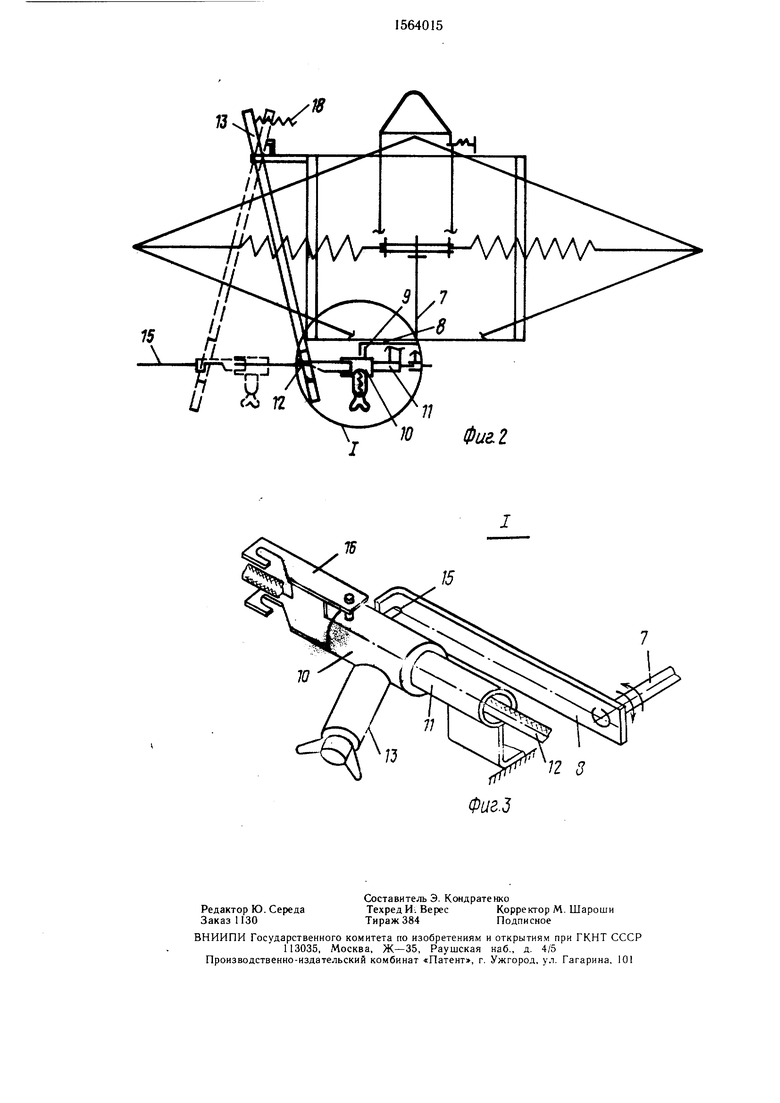
На фи 1 С Сматичю представлен пред- 1 orvOiiDHt мьнч, н . фиг 2 -тоже, вм i св(|1-л па л п 1 у 5ел 1 ка фиг 2, вид в аксо , rp:ii
Токоприемник т pa к iiopnioi о средства содержш подвижные ралы валами, усыновленные на ос.чов iHi -i 2 несущие токо- сьемяые Л( ме гы 3 ксл )рые соединены с рамами 1 npyi ими токопроводящими шунтами 4 Подвижные рамы связаны с одними концами подъемных пружин 5,
КОНЦЫ КОТОРЫХ CB4iJ;lh C )ЙКОЙ 6, /К6СТ
ко связанной t арнирпо закрепленной на основа кии 2 осью 7. имеющей рычаг 8, L которым шакмо ief с палец 9, закрепленный на оо, HV C (i охватывающей полую втулкч 1, в логорио np(jnymena гибкая связь 12 ари 1-ш обо7-1 ia имеет нолый выступ 13, в логором пеопендикулярно гибкой связи 12 установлена пружина 14, с рычагом 8 взаимодействует палец 15, а на обойме Ю закреплена защелка 16. взаимодействующая i, одним концом двуплечим рычагом , другой конец которою связан с пружиной 18 отекания
Токоприемник работает образом
При нормальном режиме пружины 5 обеспечивают стабильное контактное нажатие токосъемных элементов 3, а гибкая связь 12 - опускание юкоприемника вручную из кабины водителя При возникновении удар ных нагрузок, превышающих допустимые, нарушается синхронизирующая связь между валами, в результате чего стойка 6 наклоняется При этом поворачивается ось 7 вместе с рычагом 8, который освобождает палец 15 и обойма 10 соскакивает с втулки 11, а пружина 14 прижимает гибкую связь 12 к внутренней поверхности обоймы 10 Пружина 18 через рычаг 17 и защелкх 16 тянет обойму 10 вместе с гибкой связью 12 и токоприемник огхскается
сд
о
Јь
СД
Формула изобретения
Токоприемник транспортного средства, содержащий установленные на основании подвижные рамы, несущие токосъемные элементы и связанные с одними концами подъемных пружин, другие концы которых закреплены на стойке, связанной с основанием, пропущенную через направляющий ролик, установленный на основании, связанную с рамами и с узлом управления положением токоприемника гибкую связь, закрепленную одним концом на основании пружину опускания, отличающийся тем, что, с целью повышения надежности, он снабжен рычагами, один из которых выполнен двуплечим с шарнирным закреплением на основании, а другой своим концом жестко закреплен на шарнирно связанной с основанием оси, на которой закреплена упомянутая стойка, закрепленной на основании полой втулкой, в которую пропущена гибкая связь, охватывающей втулку обоймой с полым выступом, в котором перпендикулярно гибкой связи установлена для вза0 имодействия с ней пружина, и пальцем, взаимодействующим с другим рычагом, и шарнирно закрепленной на обойме защелкой, взаимодействующей с одним концом первого рычага, другой конец которого связан с другим концом пружины опускания.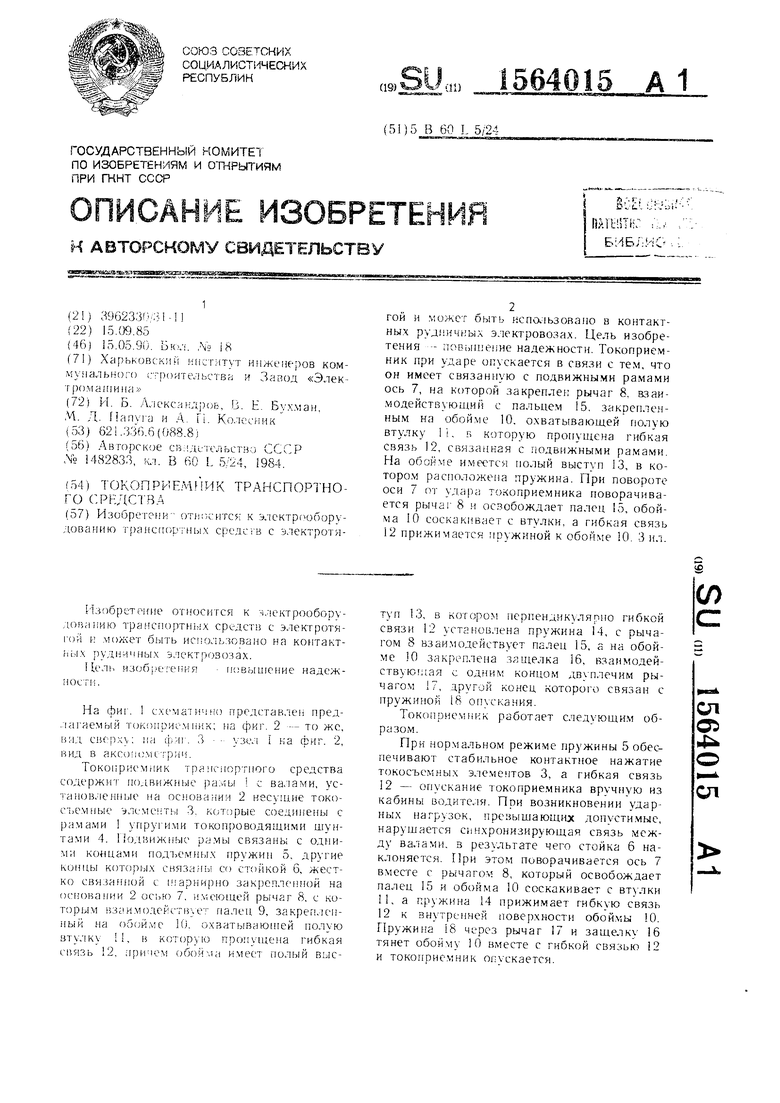
| название | год | авторы | номер документа |
|---|---|---|---|
| Токоприемник транспортного средства | 1983 |
|
SU1237489A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО СКЛАДЫВАНИЯ ТОКОПРИЕМНИКА ЭЛЕКТРОПОДВИЖНОГО СОСТАВА ПРИ АВАРИЙНОМ РЕЖИМЕ ТОКОСЪЕМА И ТОКОПРИЕМНИК | 2021 |
|
RU2753770C1 |
| ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2368513C1 |
| Токоприемник транспортного средства | 1984 |
|
SU1482833A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| Штанговый токоприемник | 1976 |
|
SU770868A1 |
| ТОКОСЪЕМНОЕ УСТРОЙСТВО | 2001 |
|
RU2191708C2 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОЕЗДОВ | 2004 |
|
RU2272720C1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2009 |
|
RU2428327C1 |
| Токоприемник | 1979 |
|
SU880807A1 |
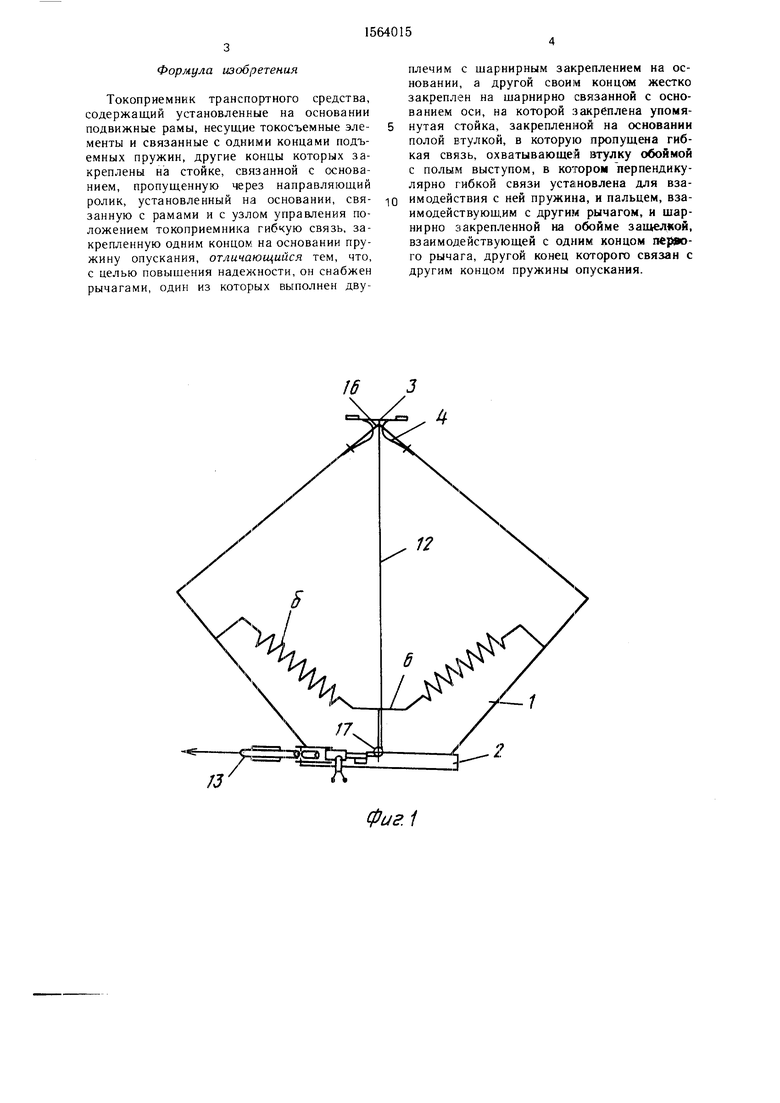
Изобретение относится к электрооборудованию транспортных средств с электротягой и может быть использовано на контактных рудничных электровозах. Цель изобретения - повышение надежности. Токоприемник при ударе опускается в связи с тем, что он имеет связанную с подвижными рамами ось 7, на которой закреплен рычаг 8, взаимодействующий с пальцем 15, закрепленным на обойме 10, охватывающей полую втулку 11, в которую пропущена гибкая связь 12, связанная с подвижными рамами. На обойме имеется полый выступ 13, в котором расположена пружина. При повороте оси 7 от удара токоприемника поворачивается рычаг 8 и освобождает палец 15, обойма 10 соскакивает с втулки, а гибкая связь 12 прижимается пружиной к обойме 10. 3 ил.
16
/3
7
Фиг. 1
;j
Ш /
U и 12
76
Фиг. 2
15
12 8
