Фиг.1
Изобретение относится к управлению горными машинами, в частности к устройствам дистанционного управления секцией механизированной крепи с соседней секции
Целью изобретения является повышение надежности в работе за счет переключения исполнительного блока синхронно командному, а также снижение усилия при управлении отсекателем давления
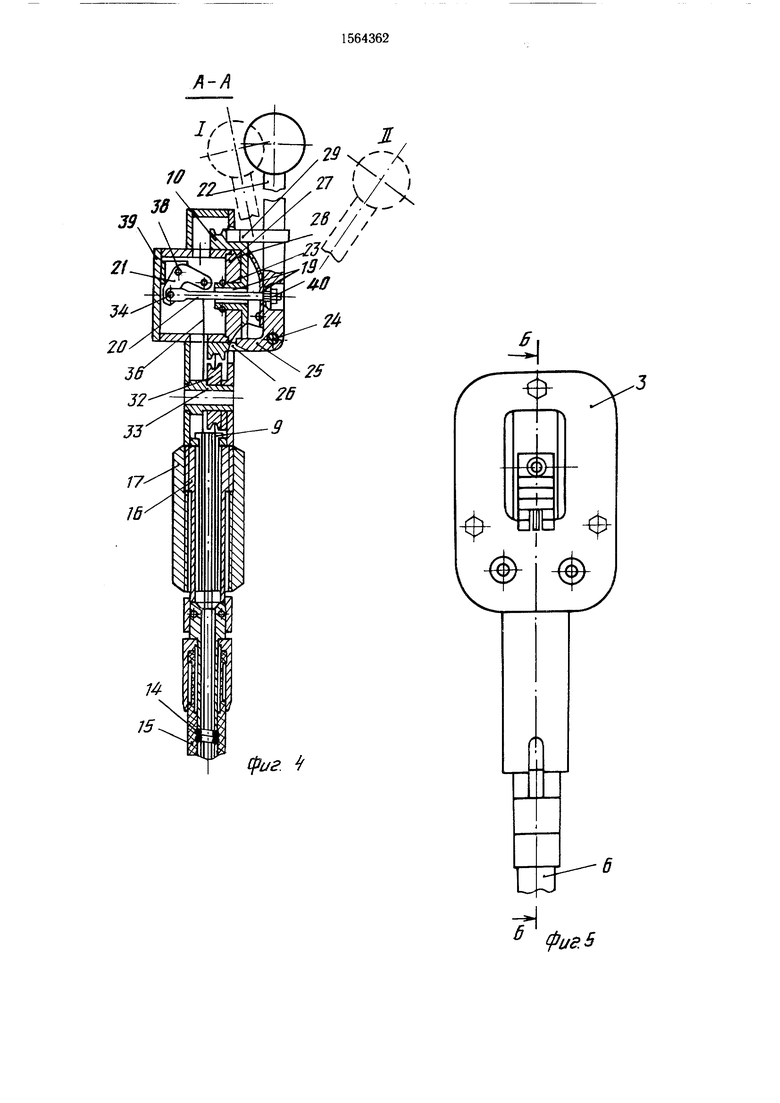
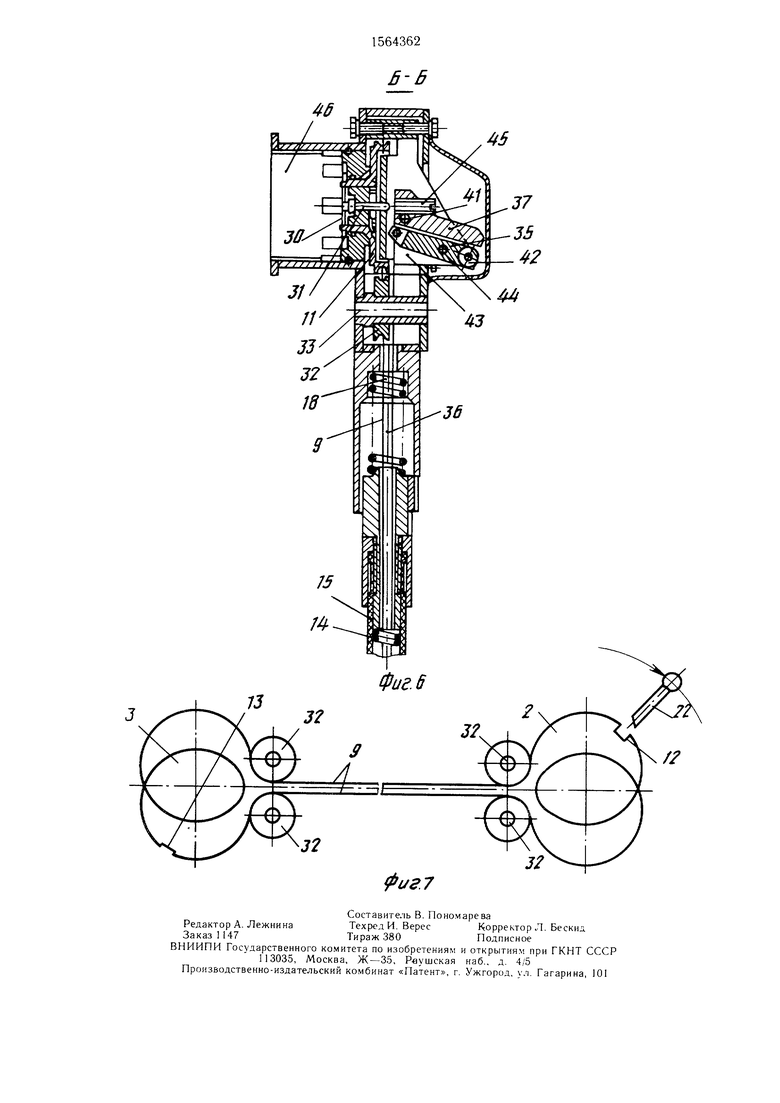
На фиг 1 изображено дистанционное устройство управления секцией механизированной крепи, вид со стороны забоя, на фиг 2 - кинематическая схема устроства, на фиг 3 - командный блок с гибкой оболочкой, на фиг 4 - разрез А-А на фиг 3, на фиг 5 - исполнительный блок, на фиг 6 - разрез Б Б на фиг 5, на фиг 7 - навивка троса на барабанах
Устройство 1 дистационного управления (фиг 1) секцией механизированной крепи состоит из командного блока 2 и исполнительного блока 3, установленных на рядом стоящих секциях 4 и 5 крепи Команд-ный блок 2 соединен с исполнительным блоком 3 гибкой оболочкой 6 В гибкой оболочке 6. командном 2 и исполнительном 3 блоках размешены механизмы гк реключения позиций 7 и включения отсекателя давления 8 (фиг 2)
Механизм 7 переключения поящий (фиг 2) состоит из троса 9 i идрораспре делителя, навитого по два витка на бараба ны 10 и 11 командною и исполнитель ного блоков, причем навивка на барабаны произведена в противоположных направле ыиях (фиг 7). а трос закреплен в стопорных отверстиях 12 и 13 противолежащих реборд барабанов 10 и 11 соответственно
Обе ветви троса пропицены чере отверстие гибкой оболочки 6, соединяющей командный 2 и исполнительный 3 Г юки и состоящей из плотно навитой спирапи 14, «кию ченной в резиновый шланг 15 (фиг 1) имею ший концевые заделки, наимодейств юшие с втулками 16 и 17 натяжн но сгрой ства с одной стороны и с пр /ьиной 18 (фиг 6) с другой стороны
Барабан 10 установлен в корпусе командного блока с возможностью вращения Через центральное отверстие 19 (фиг 4) в барабане и рукоятке пропущена тяга 20 механизма 8 включения отсекателя давления, соединяющая коромысло 21 с пкояткой 22 Опорой вращения барабана СЛУЖИТ внутренняя расточка 23 в корпусе комананого бло- ка 2 К проушинам, закрепленным неподвижно на барабане 10, осью 24 присоедине на рукоятка 22, имеющая фиксатор 25, раз метенный в паз 26 барабана Ю вращающегося вокруг цилиндрическою выстмта 27, выполненного с пазами 28 Пои вращении рукояткой 22 барабана 10 фикса i op 25 может совмещаться с любым пазом 28 цилиндри ческого 27 Для pa irp жи от изги
бающих усилий оси 24 на барабане имеется вилка 29, охватывающая рукоятку 22.
Барабан 11 исполнительного блока 3 (фиг 5 и 6) установлен в корпусе 30 и соединен с толкателем 31 Корпуса командного и исполнительного блоков снабжены отклоняющими роликами 32, установленными на осях 33
Механизм 8 включения отсекателя давления (фиг 2) состоит из рычажного механизма 34, установленного в командном блоке 2, и рычажного механизма 35, установленного в исполнительном блоке 3 Рычажные механизмы 34 и 35 соединены между собой тросом 36 отсекателя давления, шарнир- но закреплены в корпусах командного и исполнительного блоков и выполнены в виде коромысел 21 и 37 Коромысло 21 рычажного механизма 34 командного блока 2 прикреплено шарниром 38 к крышке 39 корпуса блока 2 (фиг 4) Одно плечо коромысла 21 соединено с тросом 36, а другое шар нирно соединено с тягой 20, прикрепленной к рукоятке 22, при этом тяга пропущена через центральное отверстие 19 в рукоятке управления и барабане 10 и закреплена гайкой 40, имеющей шаровую опору, выполняющую роль шарнира
Коромысло 37 рычажного механизма 35 (фиг 2 и 6) прикреплено осью 41 к корпусу 30 исполнительного блока 3 и взаимодействует одним плечом с толкателем 31, а другим плечом контактирует с роликом 42 рычага 43, соединенного осью 44 с корпусом Второй конец рычага 43 связан с тросом 36 отсекателя давления Плечо рычага 37, взаимодействующее с толкателем 31, имеет регу- шруемый упор 45 Исполнительный блок 3 в рабочем положении крепится к распределителю 46 (фиг 6)
Подютовка устройства к работе заключается в натяжении троса 9 гидрораспределителя путем сжатия пружины 18, охватываю щей трос и входящей в гибкую оболочку На1яжение производится вращением резьбовых втулок 16 и 17 натяжного устройства (фиг 4)
Перед началом работы рукоятка 22 находится в нейтральном положении
Работа устройства дистанционного управления секцией механизированной крепи (фиг 2) заключается в передаче вращательного движения механизмом 7 переключения позиций и поступательного движения механизмом 8 включения давления Вращательное и поступательное движения осуществляются одной рукояткой 22 управления, расположенной на командном блоке
Переключение позиций осуществляется вращением рукоятки 22 совместно с барабаном 0 (фн 4) Для этого необходимо фиксатор 25 вывести из паза 28 цилиндрической части 2 корпуса командного блока 2 путем наклона рукоятки 22 в положение I При вращении рукоятки осуществляется синхронный поворот барабанов 10 и II, кинематически связанных натянутым и замкнутым на барабанах тросом 9 (фиг. 7). Одновременно (синхронно) с барабаном 11 вращается золотник управляемого гидрораспределителя 46, на хвостовике которого неподвижно закреплен барабан 11. После выбора поворотом рукоятки 22 определенной позиции рукоятка устанавливается в нейтральное положение с одновременной фиксацией от случайных поворотов фиксатором 25 в пазах 26 и 28 (фиг. 3).
Включение давления механизмом 8 производится наклоном рукоятки 22 в положение II (фиг. 4). При этом рукоятка, поворачиваясь вокруг оси 24, тянет тягу 20, которая
поворачивает коромысло 21 вокруг шарнира 38. Второй конец коромысла 21, повора чиваясь, тянет трос 36 и поворачивает рычаг 43, который роликом 42 нажимает на рычаг 37, контактирующий с толкателем 31 отсекателя давления гидрораспределителя 46. соединяя одну из полостей гидроцилиндра механизированной крепи с напором.
Таким образом осуществляется включение всех гидроцилиндров механизированной крепи как последовательно, так и избирательно.
Выключение давления осуществляется наклоном рукоятки 22 в нейтральное положение (на фиг. 4 показано сплошной линией) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционного управления секцией механизированной крепи | 1978 |
|
SU775335A1 |
| Устройство дистанционного управления секцией крепи | 1986 |
|
SU1583623A1 |
| Устройство дистанционного управления секцией крепи | 1979 |
|
SU870735A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| Устройство для управления колесами полуприцепа транспортного средства | 1983 |
|
SU1105360A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2005 |
|
RU2299329C2 |
| КЛИПСАТОР | 2000 |
|
RU2162638C1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| Устройство автоматического управления механизированной крепью | 1990 |
|
SU1809099A1 |
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДОЛИНСКОГО УКД, СЕКЦИЯ КРЕПИ (ВАРИАНТЫ), ПЕРЕКРЫТИЕ КРЕПИ, ВЫДВИЖНОЙ КОЗЫРЕК, СТАВ, ЛЕНТОЧНЫЙ КОНВЕЙЕР, МЕХАНИЗМ ЦЕНТРИРОВАНИЯ ЛЕНТЫ, УСТРОЙСТВО УПРАВЛЕНИЯ КОНВЕЙЕРА, КОМБАЙН ОЧИСТНОЙ (ВАРИАНТЫ), УСТРОЙСТВО ПОДЪЕМА БАРАБАНА КОМБАЙНА, ПРИВОД ОТБОЙНОГО БАРАБАНА КОМБАЙНА, СПОСОБ ОБЕСПЫЛИВАНИЯ РАБОЧЕГО ПРОСТРАНСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МАНИПУЛЯТОР ОЧИСТНОГО КОМПЛЕКСА, ЛЕСТНИЦА СТОЕЧНАЯ | 1997 |
|
RU2130554C1 |
Цель изобретения - повышение надежности в работе за счет переключения исполнительного блока синхронно командному. Устройство включает командный блок, содержащий рукоятку управления, связанную с тягой, и исполнительный блок, содержащий распределитель с золотником и отсекателем давления, гибкую оболочку, соединяющую командный и исполнительный блоки, содержащую трос отсекателя давления. Блоки снабжены барабанами, кинематически связанными тросом, содержащим две ветви, жестко закрепленные на барабанах, навитые от точек закрепления в противоположных направлениях и расположенные в гибкой оболочке, причем барабан командного блока связан с рукояткой управления, а исполнительного блока - с золотником распределителя. Для снижения усилия при управлении отсекателем давления, тяга рукоятки управления и отсекатель давления взаимодействуют с тросом отсекателя давления посредством рычажных механизмов, установленных в блоках. Гибкая оболочка образована плотно навитой спиралью. Блоки снабжены роликами, взаимодействующими с ветвями троса, и установлены у входа в гибкую оболочку. 3 з.п. ф-лы, 2 ил.
фаг 5
39
21
фиг. f
ев -ф
н
6 фи&&
32
3
45
Фиг. 6
.7
32
| Устройство дистанционного управления секцией механизированной крепи | 1978 |
|
SU775335A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Гидродемпфер | 1985 |
|
SU1295079A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
