Изобретение относится к импульсной технике и может быть использовано в электро- и радиосвязи, измерительной технике и автоматике для дискретной фильтрации сигналов.
Цель изобретения - повышение чувствительности путем уменьшения шумов, обусловленных округлением результата произведений,и устранения накопления ошибок округления в процессе работы цифрового фильтра.
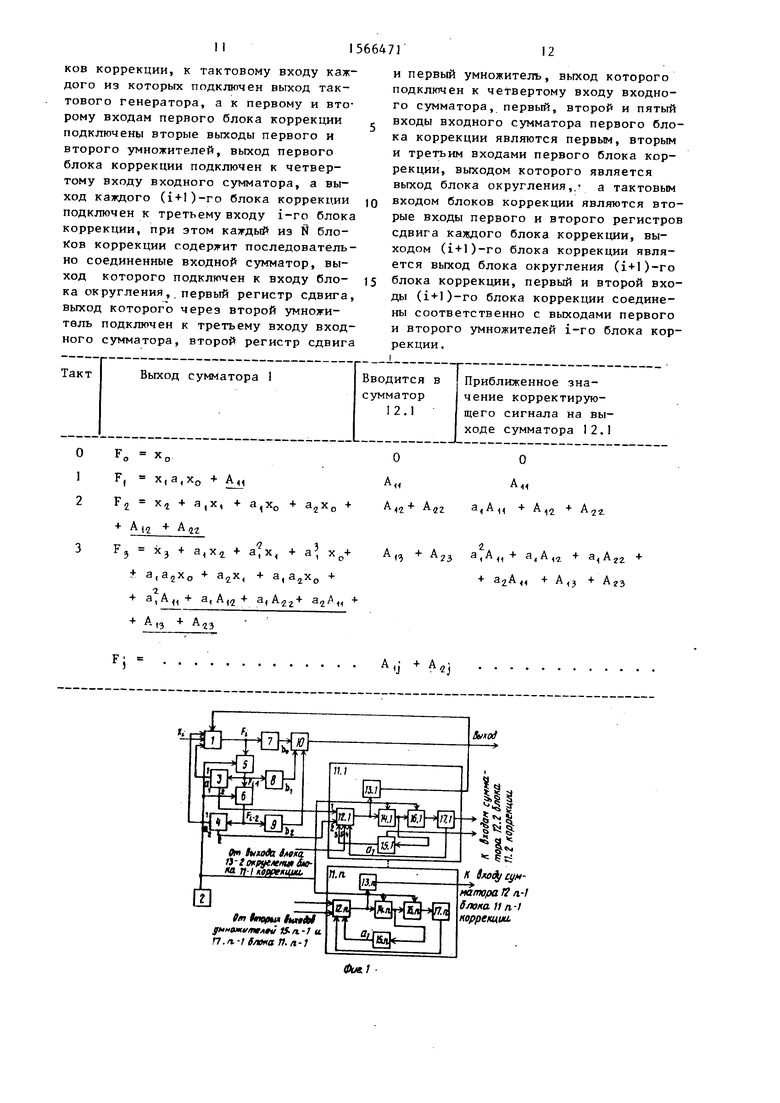
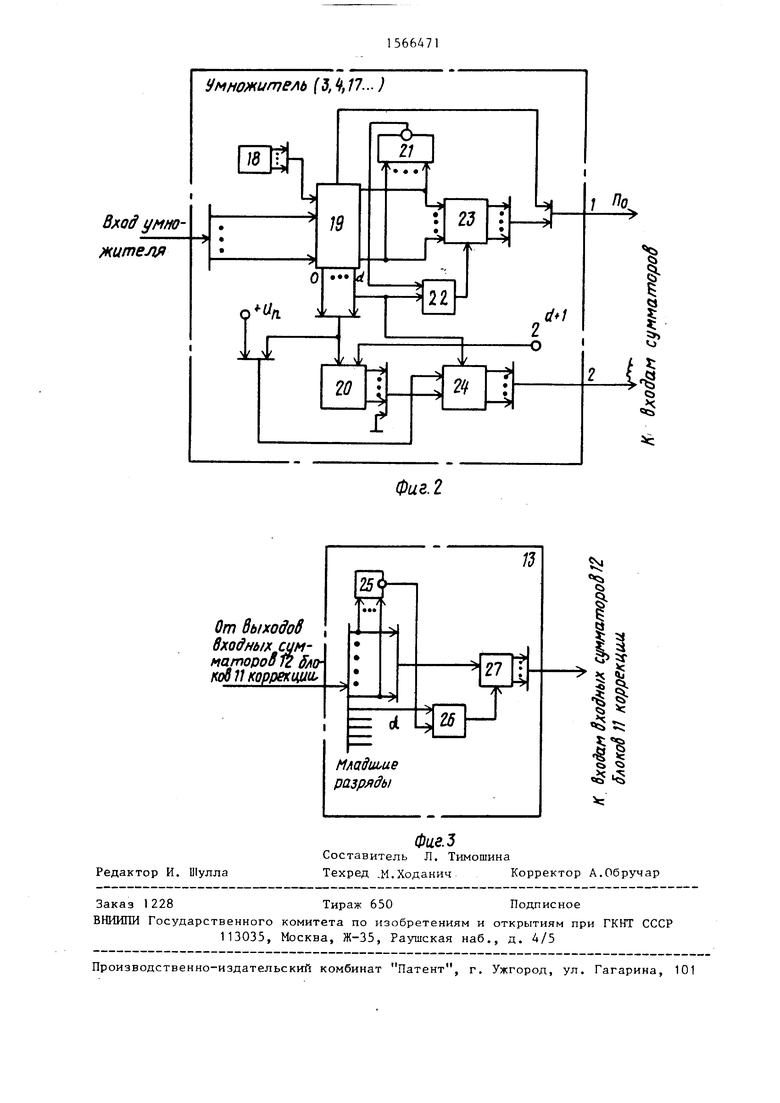
На Фиг. 1 приведена блок-схема цифрового фильтра; на фиг. 2 - блок- схема умножителя; на фиг. 3 - схема блока округления.
Цифровой фильтр содержит первый сумматор 1, тактовый генератор 2, первый 3 и второй 4 умножители, первый 5 и второй 6 регистры сдвига, третий 7, четвертый 8, пятый 9 умножители, второй сумматор 10, N блоков 11.1-11.N коррекции, каждый из которых включает входной сумматор 12, блок 13 округления, первый регистр 14 сдвига, второй умножитель 15, второй регистр 16 сдвига и первый умножитель 17.
Умножитель включает датчик 18 весового коэффициента, блок 19 перемножения, вьгчитателъ 20, элемент И-НЕ 21, элемент И 22, сумматор 23, коммутатор 24. Блок округления содержит элемент И-НЕ 25, элемент И 26, сумматор 27.
Построение умножителя позволяет осуществлять округление результата произведения и Формирование ошибки округления. В блоке округления округление происходит так же, как и округление результата произведений в умножителях. Дополнительно выходы первого 17.1 и второго 15.1 умножителя каждого блока II.i коррекции соединены г соответствующими входами входного сумсл
0
оэ
4Ь
мттора 12.d + l) блока ll.(i + l) коррекции, выход блока 13.(i+l) округления (i+l)-ro блока ll.(i+l) коррекции соединен с одним из входов входного сумматора 12.1 1-го блока ll.i коррекции. Дополнительные выходы первого 3 и второго 4 умножителя соединены с соответствующими входами входного сумматора 12.1 первого блока 11.1 коррекции, а выход блока 13.1 округления блока 11.1 коррекции соединен с одним из входов первого сумматора 1.
Цифровой фильтр работает следую- щим образом.
Входной сигнал в виде последовательности отсчетов, представленных в цифровой форме и следующих с периодом дискретизации Т поступает на цифровой фильтр второго порядка (биквадратное звено), построенный на блоках 1-10. Частота поступления отсчетов на вход устройства должна быт
синхронизирована и равна частоте
сдвига отсчетов в первом 5 и втором 6 регистрах сдвига, которая задается тактовым генератором 2. Если, например, предлагаемое устройство используется для цифровой обработки знало- говых сигналов, то на его входе включается аналого-цифровой преобразователь (АЦП не показан), управляемый от тактового генерчтора 2. При работ устройства от цифровой тинии связи АЦП удален от предлагаемого устройства, тактовый генератор 2 может быть соединен с входом устройства с целью выделения хронирующего (тактового) сигнала непосредственно из входного цифрового сигнала известными способами. Если весовые коэффициенты первого - пятого умножителей блоки 3, 4, 7-9 равны соответственно а, ае ьо Ь, Ьд, то передаточная функция устройства (реализующая передаточную функцию биквадратного звена) в z-плоскости равна:
%г -
H(z) (1 - a,z - a2z 7Г х
(Ь,
+ b, b,z Z)
(О
Определяют, какие из пяти умножителей 3, 4, 7-9 являются основными источниками шумов округления произ- ведений. Выходные сигналы третьего 7, четвертого 8 и пятого 9 умножителей не вводятся в цепи обратной связи и,
5
0
5
0 5 0 5
0
5
если позволяют условия стыка с внешними устройствами, округление результата произведения в этих умножителях может вообше не проводиться, при этом разрядность отсчетов на выходе устройства (на выходе второго сумматора 10) соответствует сумме разрядностей выходного отсчета первого сумматора 1 и наибольшей разрядности одного из весовых коэффициентов Ь0, Ьо bu (чаще всего разрядности всех весовых коэффициентов выбираются одинаковыми) . При необходимости ограничения разрядности выходного сигнала устройства округление можно произвести во втором сумматоре 10, при этом всегда можно сделать ттк, чтобы ошибка округления не превышала половины веса младшего оставляемого разряда (например, при округлении до ближайшег о целого числа младших разрядов).
Округление результатов произведений необходимо проводить лишь в тех умножителях, которые находятся в цепях обратной связи (первый 3 и второй 4 умножители), поскольку в про- 1ИВНОМ случае разрядность отсчетов, циркулирующих по петле обратной связи, в процессе работы фильтра пришлось бы неограниченно увеличивать, и фшп тр ста бы физически нереализуем. Напичие обратной связи может приводить к накапливанию ошибок округления, а результирующая ошибка может заметно превысить вес младшего разряда отсчетов, циркулирующих по петлям обратной связи. Таким образом, в соответствии с целью изобретения основной задачей является компенсация ошибок округления, вносимых только первым 3 и вторым 4 умножителями.
Пусть х, - входной сигнал устройства в i-м тактовом интервале (фиг.1), F,, F.,., , Г,г- выходные сигналы первого сумматора 1 в тактах i, i I, i-2 (два последних сигнала снимаются соответственно с выходов первого 5 и второго 6 регистров сдвига), А , и ошибки округления соответственно в первом 3 и втором 4 умножителях в i-м тактовом интервале, тогда Формирование выходного сигнала Ь, первого сумматора 1 без учета корректирующего сигнала, подаваемогб на первый сумматор 1 с выхода первого блока 13.1 округления, описывается разностным уравнением
F х
+ a,F;-, +
+ A
1, + A
(2)
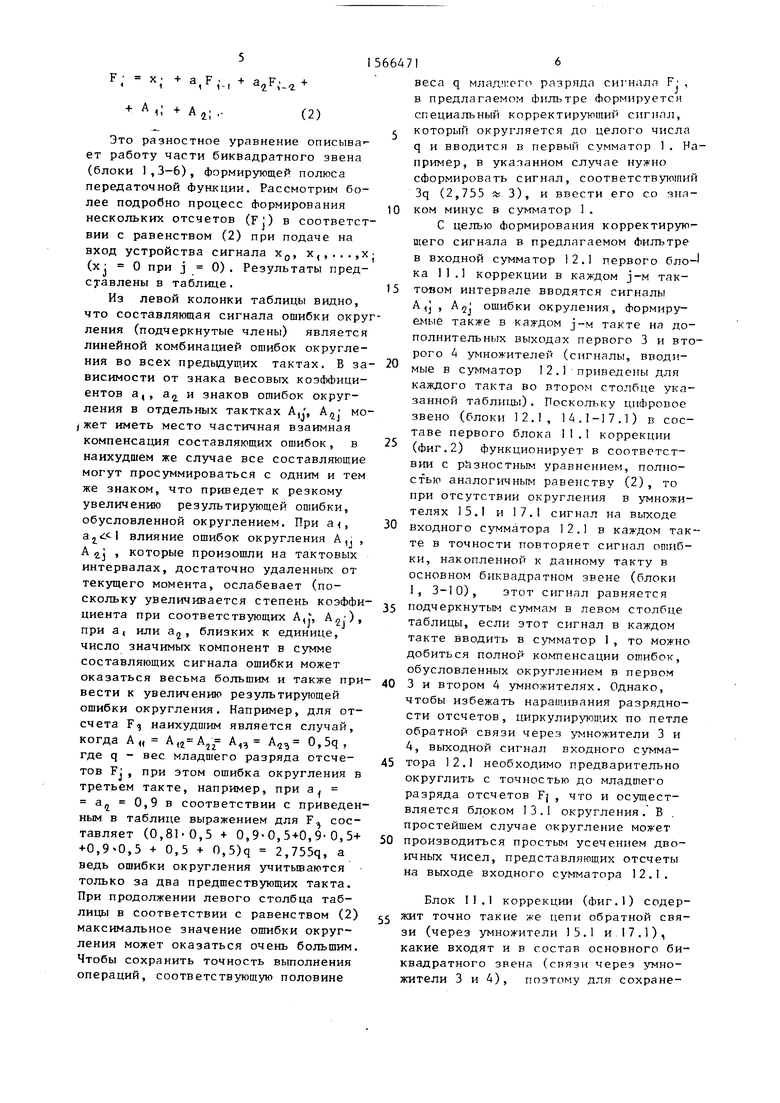
Это разностное уравнение описыва-- ет работу части биквадратного звена (блоки 1,3-6), формирующей полюса передаточной функции. Рассмотрим более подробно процесс формирования нескольких отсчетов (Fj) в соответствии с равенством (2) при подаче на вход устройства сигнала х0, х,,...,х; (х: 0 при j 0). Результаты представлены в таблице.
Из левой колонки таблицы видно, что составляющая сигнала ошибки округления (подчеркнутые члены) является линейной комбинацией ошибок округления во всех предыдущих тактах. В зависимости от знака весовых коэффициентов а,, ай и знаков ошибок округления в отдельных тактках А,., мо- жет иметь место частичная взаимная компенсация составляющих ошибок, в наихудшем же случае все составляющие огут просуммироваться с одним и тем же знаком, что приведет к резкому увеличению результирующей ошибки, обусловленной округлением. При а, влияние ошибок округления А,. , j , которые произошли на тактовых интервалах, достаточно удаленных от текущего момента, ослабевает (поскольку увеличивается степень коэффициента при соответствующих А при а, или а2,
число значимых компонент в сумме составляющих сигнала ошибки может оказаться весьма большим и также привести к увеличению результирующей ошибки округления. Например, для отсчета F.J наихудшим является случай, когда А„ А, А13 А29 0,5q, где q - вес младшего разряда отсчетов F: , при этом ошибка округления в третьем такте, например, при а а„ 0,9 в соответствии с приведенЧ А 2 j ) близких к единице,
ным в таблице выражением для F составляет (0,8ЬО,5 + 0,9-0,5-Ю,9-0,5+ +0,9-0,5 + 0,5 + 0,5)q 2,755q, a ведь ошибки округления учитываются только за два предшествующих такта. При продолжении левого столбца таблицы в соответствии с равенством (2) максимальное значение ошибки округления может оказаться очень большим. Чтобы сохранить точность выполнения операций, соответствующую половине
;
15
20
25
5664716
веса q младтсго разряда сигнала FJ , в предлагаемом фильтре Формируется специальный корректирующий сигнал, г который округляется до целого числа q и вводится в первый сумматор 1. Например, в указанном случае нужно сформировать сигнал, соответствующий 3q (2,755 3), и ввести его со чна10 ком минус в сумматор 1.
С целью формирования корректирующего сигнала в предлагаемом Фильтре в входной сумматор 12.1 первого бло-I ка 11.1 коррекции в каждом j-м тактовом интервале вводятся сигналы А , ошибки окруления, Формируемые также в каждом j-м такте на дополнительных выходах первого 3 и второго 4 умножителей (сигналы, вводимые в сумматор 12.1 приведены для каждого такта во втором столбце указанной таблицы). Поскольку цифровое звено (блоки 12.1, 14.1-17.) в составе первого блока 11.1 коррекции (фиг.2) функционирует в соответствии с разностным уравнением, полностью аналогичным равенству (2) , то при отсутствии округления в умножителях 15.1 и 17.1 сигнал на выходе
30 входного сумматора 12.1 в каждом такте в точности повторяет сигнал ошибки, накопленной к данному такту в основном биквадратном звене (блоки 1, 3-10), этот сигнал равняется
35 подчеркнутым суммам в левом столбце таблицы, если этот сигнал в каждом такте вводить в сумматор 1, то можно добиться полной компенсации ошибок, обусловленных округлением в первом
40 3 и втором 4 умножителях. Однако,
чтобы избежать наращивания разрядности отсчетов, циркулирующих по петле обратной связи через умножители 3 и 4, выходной сигнал входного сумма45 тора 12.1 необходимо предварительно округлить с точностью до младшего разряда отсчетов FJ , что и осуществляется блоком 13.1 округления. В простейшем случае округление может
50 производиться простым усечением двоичных чисел, представляющих отсчеты на выходе входного сумматора 12.1.
Блок 11.1 коррекции (фиг.1) содержит точно такие же цепи обратной связи (через умножители 15.1 и 17.1), какие входят и в состав основного биквадратного звена (связи через умножители 3 и 4), поэтому для сохранеniri постоянной разрядности отсчетов и процессе работы в умножителях 15.1 17.1 также необходимо проводить ок- Р гление результатов произведений и также может иметь место накопление ошибок округления, которые однако имею уже гораздо еныпие значения, чем п основном биквадратном звене
УСТРОЙСТВЯ (блОКИ 1, 3-10), ПОСКОЛЬ-
ку на вход блока 11.1 коррекции с дополнительных выходов умножителей 3 и 4 поступают сигналы, вес старшего разряда у которых равен лишь половине песа младшего разряда отсчетов (F, К, ,,...,), циркулирующих в основном (чп падратном звене (блоки 1, 3-10). Нос-коль к у весовые коэффициенты умно- ,- 1телей 3, 15,1 и 4, 17.1 попарно лвны, на выходе блока 13.1 округле- или в каждом тактовом интервале появляется отсчет, приближенно равный значению ошибки округления, накопившейся к данному такту в основном биквадратном звене (блоки 1, 3-10), эти значения ошибки соответствуют сигналам, приведенным в правом столбце тлблииы. Поскольку выходной сигнал лока 13.1 округления подается на ; сумматор 1 , Го в каждом такто- вом интервале в сумматоре 1 происходит к -ни нсация накопившейся к данному такту ошибки округления корректирующим сигналом, снимаемым с выхода олока 13.1 округления.
Допустим, в основном биквадратном вене (блоки 1, 3-10) обрабатываются пить целые числа, весовые коэффициенты могут быть и дроблеными, но результаты произведений округляются до ближайшего целого. В блоке 11.1 кор- пекпин обрабатываются уже дробные числа, характеризующие ошибки округления, если в процессе работы на выходе сумматора 1 сигнал -г та нет больше или равным единице, то он округляется блоком 13.1 округления до ближайшего целого, которое вводится в сумматор 1 и компенсирует накопившуюся ошибку округления.
В блоке 11.1 также возникает ошибка за счет округления произведений в умножителях 15.1 и 17.1, однако эти отибки уже значительно меньше, чем в основном биквадратном звене (известный фильтр). Так, если ошибка А окружения для одного акта умножения в умножителях 3 и 4 удовлетворяет ус- пов1тю |Al f 0,5q, где q - вес мллдше
Q
5 0
Q
5
го разряда отсчетов (F; ...), циркулирующих в основном биквадратном звене , то ошибка округления в умножителях 15.1 и 17.1 может не превышать уже половины веса младшего разряда неокругленного (точного) значения произведений в умножителях 3 и 4 (при Формировании выходных сигналов умножителей 3 и 4 эти разряды отбрасываются при округлении).
При необходимости можно повысить точность вычислений за счет компенсации ошибок округления, возникающих уже в блоке 11.1, для чего может быть введен точно такой же блок 11.2, на вход которого в каждом такте подаются сигналы ошибки округления от умножителей 15.1 и 17.1 и который формирует корректирующий сигнал, вводимый в сумматор 12.1, т.е. блок 11.2 по отношению к блоку 11.1 коррекции выполняет те же функции, что и блок 11.1 по отношешпо к основному биквадратному звену (блоки 1, 3-10).
Компенсация ошибок округления,возникающих в блоке 11.2 коррекции, мо- жет быть аналогично осуществлена следующим блоком 11.3 коррекции и т.д. В общем случае в устройстве может бьть введено N блоков 11 коррекции, число ьоторых определяется требованиями к точности вычислений и зависит от того, насколько велика может оказаться ошибка округления, накопленная в основном биквадратном звене при данных весовых коэффициентах а,, ай. На практике чаще всего можно ограничиться введением одного, редко двух блоков 11 коррекции.
Таким образом, в предлагаемом устройстве производится компенсация оши- пок округления в выходном сигнале F; первого сумматора 1 и устраняется их накопление. Тем самым устраняется влияние ошибок округления и на выходной сигнал всего устройства, поскольку о ругление результатов произведений в умножителях 7-9 может вообще не проводиться, так как их выходные сигналы не вводятся в цени обратной связи.
Перемножение отсчета и весового коэффициента производится блоком 19 перемножения, старшие выходные разряды которого подаются на сумматор 23, а младшие - на вычитатель 20 (Фиг,2). Если величина старшег о разряда в группе младших разрядов равна единице,
JI5
то эта единица поступает через элемент И 22 на дополнительный вход сумматора 23, увеличивая число на его выходе на единицу (на один младший разряд), в противном случае единица на дополнительный вход сумматора 23 не поступает. Таким образом, осуществляется округление результата произведения. Элемент И-НЕ 21 использован для защиты сумматора 23 от переполнения. Формирование сигнала ошибки округления проводится с помощью вычитателя 20 и коммутатора 24 следующим образом. Допустим, точное значение П произведения попадает между i-м и (1+1)-м уровнями квантования, расстояние между которьгми равно q (вес младшего оставляемого разряда на выходе сумматора 23). Если формирование округленного произведения ГТ0 производится по правилу I По | int(|n| + 0,5), где int - целая часть числа, то при |п - ,5q (старший d-й разряд группы младших разрядов на выходе блока 19 перемножения равен нулю) ошибка округления положительна (% |П - JjlJfeO) и на дополнительный выход умножителя (Фиг.2, второй выход) сигнал ошибки подается через коммутатор 24 со знаком плюс (в случае, показанном на фиг. 2, положительным двоичным числам соответствует единица в знаковом разряде), а его значащая часть образуется группой младших разрядов (О-d, фиг.2) выходного сигнала блока 19 перемножения. Напротив, при | П | - ,5q в d-м разряде появляется единица, а величина |п| округляется до уровня (i-H)q, при этом Ј |П| - (ошибка округления отрицательна) и на дополнительный выход умножителя сигнал ошибки подается уже со знаком -, а значащая часть этого сигнала определяется разностью числа 2 и числа, образованного группой младших разрядов (О-d) на выходе блока 19 перемножения. Эта разность определяет расстоя- ние между точными значениями произведения |п| и уровнем (i+l)q (i+1-й уровень квантования (округления) произведения) и формируется вычитате- лем 20. Знаковый разряд в данном слу- чае подается от земли, что соответствует области отрицательных чисел (фиг.2). Коммутатор 24 управляется старшим d-м разрядом из области млад
0
5
0
5
4:
Q
0
5
0
5
i Iin
ших (отбрасываемых) разрядов на выходе блока 19 перемножения и при наличии единица в этом разряде на выход коммутатора 24 подключается выходной сигнал вычитателя 20, а при нулевом - само двоичное число, образованное младшими разрядами 0 - d и дополненное единицей в знаковом разряде. Таким образом, на соответствующих выходах умножителя - основном (первом) и дополнительном (втором) формируются соответственно округленное значение результата произведения и ошибки округления с соответствуюшим знаком. Коммутатор 24 может быть выполнен, например, в виде двух групп ключей (или элементов И), первая группа открывается прямым сигналом с выхода старшего отбрасываемого (d-ro) разряда умножителя 19, вторая - инверсным, а ВЫХОДЕ ключей объединены (при использовании элементов И объединение производится по ИЛИ),
Технико-экономическая эффективность предлагаемого Фильтра по сравнению с известным заключается в уменьшении шумов, обусловленных округлением результатов произведений в умножителях, расположенных в цепях обратной связи, что уменьшает искажения и повышает отношение мощностей сигнал - шум на выходе устройства.
Формула изобретения
Цифровой фильтр, содержащий последовательно соединенные тактовый генератор, первый и второй регистры сдвига, второй умножитель, первый сумматор, выход которого подключен к второму входу первого регистра сдвига, третий умножитель и второй сумматор, к второму входу которого и второму входу первого сумматора подключен соответственно через четвертый умножитель и первый умножитель выход первого регистра сдвига, а выход второго регистра сдвига, к тактовому входу которого подключен выход тактового генератора, подключен через пятый умножитель к третьему входу второго сумматора, о т л и - ч а ю щ и и с я тем, что, с целью повышения чувствительности путем уменьшения шумов, обусловленных округлением результата произведений, и устранения накопления ошибок округления в процессе работы, введены N блоков коррекции, к тактовому входу каждого из которых подключен выход тактового генератора, а к первому и второму входам первого блока коррекции подключены вторые выходы первого и второго умножителей, выход первого блока коррекции подключен к четвертому входу входного сумматора, а выход каждого (i+l)-ro блока коррекции подключен к третьему входу 1-го блока коррекции, при этом каждый из N блоков коррекции содержит последовательно соединенные входной сумматор, выход которого подключен к входу блока округления, первый регистр сдвига, выход которого через второй умножитель подключен к третьему входу входного сумматора, второй регистр сдвига
и первый умножитель, выход которого подключен к четвертому входу входного сумматора, первый, второй и пятый входы входного сумматора первого блока коррекции являются первым, вторым и третьим входами первого блока коррекции, выходом которого является выход блока округления, а тактовым
входом блоков коррекции являются вторые входы первого и второго регистров сдвига каждого блока коррекции, выходом (i-H)-ro блока коррекции является выход блока округления (i-H)-ro
5 блока коррекции, первый и второй входы (i+1)-ro блока коррекции соединены соответственно с выходами первого и второго умножителей 1-го блока коррекции.


| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ФИЛЬТР | 1993 |
|
RU2096911C1 |
| Устройство для умножения | 1988 |
|
SU1580352A1 |
| Адаптивный корректор сигнала | 1987 |
|
SU1432730A1 |
| Устройство для цифровой обработки сигналов | 1989 |
|
SU1652981A1 |
| Устройство для обнаружения и исправления ошибок в непозиционном коде | 1983 |
|
SU1134941A1 |
| Устройство обнаружения и коррекции ошибки модулярного кода | 2017 |
|
RU2653257C1 |
| Цифровой рекурсивный фильтр | 1988 |
|
SU1578720A1 |
| Устройство для обнаружения и исправления ошибок | 1990 |
|
SU1837293A1 |
| Устройство для вычисления преобразования Фурье-Галуа | 1989 |
|
SU1665385A1 |
| Преобразователь напряжения | 1990 |
|
SU1814177A1 |
Изобретение относится к импульсной технике. Цель изобретения - повышение чувствительности. Цифровой фильтр содержит сумматоры 1, 10, тактовый генератор 2, умножители 3,4, 7-9, регистры 5, 6 сдвига и блоки 11 коррекции, каждый из которых состоит из сумматора 12, блока 13 округления, регистров 14, 16 сдвига и умножителей 15, 17. Цель достигается путем уменьшения шумов, обусловленных округлением результатов произведений в умножителях 3, 4 (15 и 17), расположенных в цепях обратной связи, а также путем устранения накопления ошибок округления, вносимых умножителями 3, 4 (15, 17), за счет обеспечения компенсации этих ошибок. 3 ил., 1 табл.
+ а,а2х0 + агх + а,а2х0 +
fj
+ а,А„ + а,А(2+ а,А2г+ +
+ А,, + А4Э
ff/n 1игвЛ/ дмножитвлги 1S- п. -1 а. П.п.-1 блока ft. л-}
+ а2Ан + А,3 + Агз
С:
К 1яоА/сумматора 12 п-/ блока 11 п -I коррекции.
Умножитель (3,4,17...)
1
Фиг. 2
| Введение в цифровую фильтрацию./ /Под ред | |||
| Р.Богнера и А.Константини- диса | |||
| Пер | |||
| с англ./Под ред.Л.И.Филиппова.-М.: Мир, 1976, с | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
