Изобретение относится к области измерения массы, а именно к устройствам для измерения масс движущегося Животного.
Целью изобретения яяляется снижение погрешности измерения.
На чертеже приведена структурная схема устройства для измерения массы движущегося животного„
Устройство для измерения массы дви- ущегося животного содержит раму 1 Ј грузоподъемной платформой 2, сопря- Женной с датчиками 3 нагрузки, установленными на упоры 4, и отсекате- Леи 5 животных, выполненного с приводом 6, подключенным к первому выходу формирователя 7 импульсов, фильтрующий усилитель 8, подключенный входом к выходу датчиков 3 нагруз- ки и выходом к входу АЦП 9, АЦП 9 подсоединен выходом jc первому входу первого блока 10 памяти, соединенного выходом через блок 11 вычисления среднего значения с входом блока 12 вывода информации. Кроме того, устройство для измерения массы движущегося Животного содержит йервый и второй ключевые элементы 13 и 14, триггер 15, первый и второй компараторы 16 и 17. Второй блок 18 памяти, элементы 19 задержки, блок 20 вычисления асимметрии , блок 21 дифференцирования, счетчик 22 числа экстремумов и приемопередатчик 23 информации, вы- полненный с антенной 24, сопряженной С грузоприемной платформой 20 При этом АЦП 9 подключен выходом к первому входу первого блока 10 памяти через первый ключевой элемент 13, подсоединенный управляющим входом к выходу триггера 15, соединенного первым входом непосредственно и вторым входом через элемент 19 задержки с выходом первого компаратора 16, под- ключенного первым входом к вы- . ходу АЦП 9 и вторым входом к выходу второго блока 18 памяти. Первый ключевой элемент 13 подсоединен через последовательно соединенные блок 21 дифференцирования и счетчик 22 числа экстремумов к пер- Иому входу формирователя 7 импульсов соединенному вторым выходом с вторым Входом первого блока 10 памяти, вто- рым входом с выходом приемопередатчика 23 информации, третьим входом с управляющим входом блока 11 вычисления среднего значения и четвертым выходом с первым входом второго компаратора 17. Второй компаратор 17 подключен через шину обмена информацией к первому блоку 10 памяти, выходом к входу второго ключевого элемента 14, соединенного первым выходом-с вторым входом компаратора 17 и вторым выходом через блок 20 вычисления асимметрии -с третьим входом второго компаратора 1 7.
Устройство работает следующим образом.
На грузоприемную платформу 2 животные входят по одному. В момент захода животного на грузоприемную платформу 2 в датчиках 3 силы возникает электрический сигнал, который через фильтрующий усилитель 8 и АЦП 9 подаеся к ключевому элементу 13 посредством компаратора 16 и триггера 15, При достижении кода напряжения электрического сигнала порога срабатывания компаратора 16, причем порог устанавливается величиной, заранее занесенной в блок 18 памяти, компаратор 16 вырабатывает сигнал, который переводит триггер 15 в рабочее состояние и подает сигнал в ключевой элемент 13, который срабатывает и пропускает код- сигнал от АЦП 9 к входу блока 10 памяти и блока 21 дифференцирования. В те моменты, когда код электрического сигнала достигает локального минимума или максимума, т„е0 экстремума, вырабатывает импульс, который поступает на счетчик 22 числа экстремумов. Счетчик 22 числа экстремумов имеет нечетный коэффициент пересчета, задаваемый заранее в зависимости от длины грузоприемной платформы 2 и длины шага животного. Таким образом, подсчитывая импульсы, счетчик 22 числа экстремумов вырабатывает сигнал, который поддерживается до заполнения счетчика 22 числа экстремумов, после чего он возвращается в исходное состоянивс Сигнал, вырабатываемый счетчиком 22 чиста экстремумов, передается в формирователь 7 импульсов, который инициирует блок 10 памяти, В.блок 10 памяти начинается загрузка данных с АЦП 9, которая продолжается до тех пор, пока заполняется счетчик 22 числа экстремумов После сброса счетчика 22 числа экстремумов, т.е.поеле его заполнения, формирователь 7 импульсов вырабатывает воздействие на компаратор 17„ Ключевой
элемент 14 производит вмброс данных, поступивших из блока 10 памяти через компаратор 17, имеющих самую большую амплитуду и таким образом данные передает на блок 20 вычисления асимметрии.
Компаратор 17 проверяет величину сигнала, поступакщего из блока 20 вычисления асимметрии. В случае величины сигнала более нуля цикл сортировки повторяется заново и продолжается до тех пор, пока не будет достигнуто равенство нулю, при котором компаратор 17 загружает блок 10 памя- ти данными. После завершения загрузки блока 10 памяти данными формирователь 7 импульсов запускает блок 11 вычисления среднего значения, которое осуществляет усреднение отсортированных данных и формирует значение кода, соответствующего массе освобожденной грузоириемнон платформы 2, которое поступает через АЦП 9 и блок
10 памяти посредством задержания сиг- 25 первому входу первого блока памяти нала с компаратора 16 элементом 19через первый ключевой элемент, подзадержки сигнала, управляющего сбро-соединенный управляющим входом к
соединенный управляющим входом к вы ходу триггера, соединенного первым входом непосредственно и вторым вхо ЗО дом через элемент задержки с выходо первого компаратора, подключенного первым входом к выходу аналого-цифр вого преобразователя и вторым входом к выходу второго блока памяти, первы ключевой элемент подсоединен через последовательно соединенные блок диф ференцирования и счетчик числа экст ремумов к первому входу формировател импульсов, соединенного вторым выходом с вторым входом первого блока памяти, вторым входом - с выходом пр емопередатчика информации, третьим входом - с управляющими входами бло ка вычисления среднего значения и четвертым выходом - с первым входом второго компаратора, подключенно го через шину обмена информацией к первому блоку памяти, выходом - к входу второго ключевого элемента, соединенного первым выходом с вторым входом второго компаратора и вто рым выходом через блок вычисления асимметрии - с третьим входом второго компаратора.
сом триггера 15, и выводит полученный результат на блок 12 вывода информации. Формирователь 7 импульсов формирует сигнал управления приводом 6 отсекателя 5 животных, причем от- секатель 5 животных открывается сразу после вывода значения массы животного на блок 12 вывода информации0
В случае использования устройства распознавания номеров животных, состоящего ич антенны 24 и приемопередатчика 23, они хранятся в блоке 10 памяти вместе с номерами животных значения масс за определенный интервал времени, например, 5 сут, которые учитываются для повышения точности измерений за счет данных за предыдущие взвешивания. Номера животных в блок 10 памяти с приемопередатчика 23 заносятся через формирователь 7 импульсог,
Формула изобретения
Устройство для измерения массы движущегося животного, содержащее раму с грузоприемной апатформой, сопря- енной с датчиками нагрузки и отсе-
0
г
0
кателем животных, выполненным с приводом, подключенным к первому выходу формирователя импульсов, фильтрующий усилитель, подключенный входом к выходам датчиком нагрузки и выходом - к входу аналого-цифрового преобразователя , подсоединенного выходом к первому входу первого блока памяти, соединенного выходом через блок вычисления среднего значения с входом блока вывода информации, отличающееся тем, что, с целью снижения погрешности измерения, в него введены первый и второй ключевые элементы, триггер, первый и второй компараторы, второй блок памяти элемент задержки, блок вычисления асимметрии,блок дифференцирования, счетчик числа экстремумов и приемопередатчик информации, выполненный с антенной, сопряженной с грузоприемной платформой, причем аналого-цифровой преобразователь подключен выходом к
соединенный управляющим входом к
5
соединенный управляющим входом к выходу триггера, соединенного первым входом непосредственно и вторым вхо- О дом через элемент задержки с выходом первого компаратора, подключенного первым входом к выходу аналого-цифрового преобразователя и вторым входом - к выходу второго блока памяти, первый ключевой элемент подсоединен через последовательно соединенные блок дифференцирования и счетчик числа экстг ремумов к первому входу формирователя импульсов, соединенного вторым выходом с вторым входом первого блока памяти, вторым входом - с выходом приемопередатчика информации, третьим входом - с управляющими входами блока вычисления среднего значения и четвертым выходом - с первым входом второго компаратора, подключенного через шину обмена информацией к первому блоку памяти, выходом - к входу второго ключевого элемента, соединенного первым выходом с вторым входом второго компаратора и вторым выходом через блок вычисления асимметрии - с третьим входом второго компаратора.
0
5
0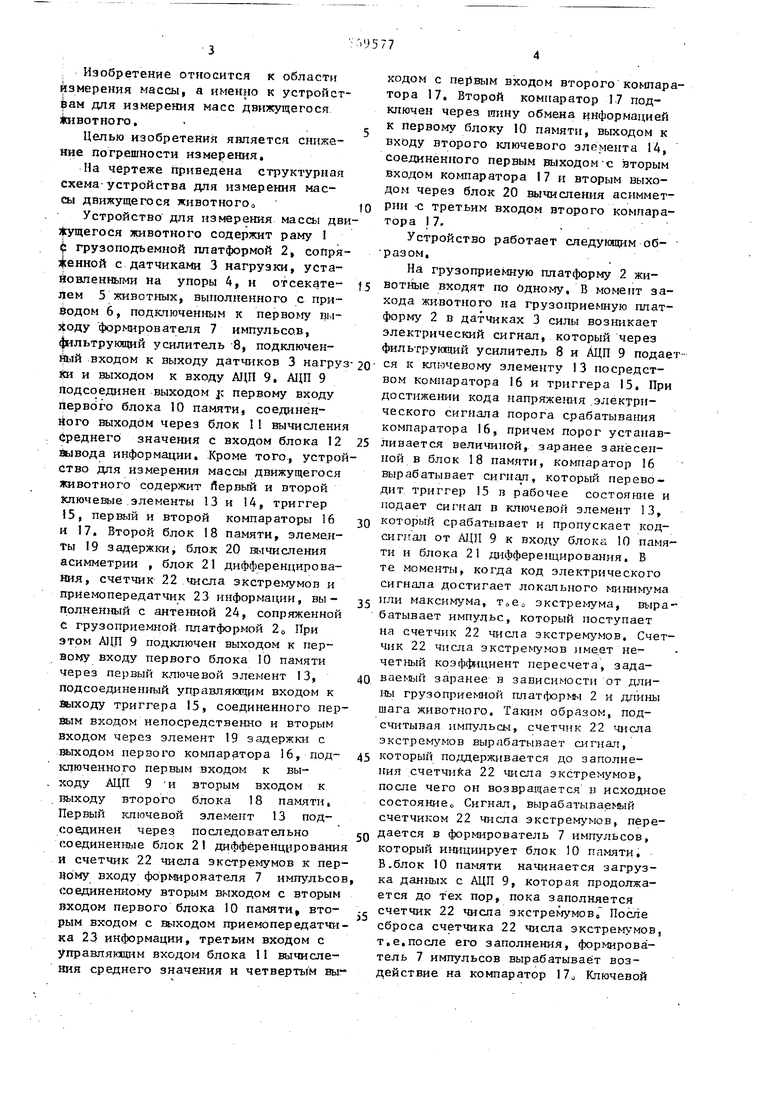

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения веса животного | 1990 |
|
SU1728671A1 |
| Устройство для регистрации массы движущегося животного | 1990 |
|
SU1704730A1 |
| Устройство для исследования пульсовой динамики сердечно-сосудистой системы | 1987 |
|
SU1512561A1 |
| КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ВРЕМЕННЫХ СДВИГОВ | 2002 |
|
RU2229157C2 |
| Устройство для уточнения места электрического пробоя изоляции кабеля | 1985 |
|
SU1278737A1 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Многоканальная система измерения и регистрации | 1988 |
|
SU1707546A1 |
| Устройство для измерения радиального зазора в турбомашинах | 1989 |
|
SU1670370A1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОЙ ОЦЕНКИ СРЕДНЕЙ ПО СТАДУ ЖИВОЙ МАССЫ ЖИВОТНОГО ИЛИ ПТИЦЫ ПРИ СЛУЧАЙНОМ ВЫБОРОЧНОМ ВЗВЕШИВАНИИ ПРОИЗВОЛЬНОЙ ОСОБИ СТАДА ЖИВОТНЫХ ИЛИ ПТИЦЫ | 2013 |
|
RU2572531C2 |
| Устройство для определения временного положения сигнала | 1985 |
|
SU1307442A1 |
Изобретение относится к области измерения массы, в частности к устройствам для взвешивания объектов в движении, например сельскохозяйственных животных. Целью настоящего изобретения является снижение погрешности измерения. Указанная цель достигается тем, что в устройство введены компаратор 16, блок 10 вычисления асимметрии, блок 21 дифференцирования, счетчик 22 числа экстремумов, а также приемопередатчик 23, выполненный с антенной 24, сопряженной с грузоприемной платформой 2. Устройство осуществляет вывод усредненного значения измеренных масс движущихся животных за любой выбранный интервал времени. 1 ил.
| Устройство для измерения веса животного при его движении | 1982 |
|
SU1040345A1 |
