Изобретение относится к обслуживанию сельскохозяйственных животных, а именно к измерению массы крупного рогатого скота.
Известен способ измерения массы животного, который заключается во взвешивании запертого животного.
Недостатком этого способа является необходимость запирания животного во время взвешивания.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому способу является способ измерения массы движущегося животного.
Наиболее существенным недостатком этого способа является низкая точность измерения массы движущегося животного, которую ограничивает операция нахождения среднего значения из всех данных, поступивших во время прохождения животного через измерительный участок.
Целью изобретения является устранение указанного недостатка и повышение точности измерения массы движущегося животного.
Это достигается тем, что при предлагаемом способе перед операцией нахождения среднего значения производят сортировку данных, заключающуюся в определении ожидаемой массы во время захода животного на измерительный участок и выбросе тех данных, которые имеют разность больше
VI
hO 00
о
/
допустимой по отношению к. ожидаемой
массе, а также проводят группировку данных по величине их амплитуд в группы и идентификацию той группы, в которую попало наибольшее число данных, с последующим нахождением среднего значения из этой группы, причем ожидаемую массу животного определяют по первой стационарной части сигнала, снимаемого с измерительного участка.
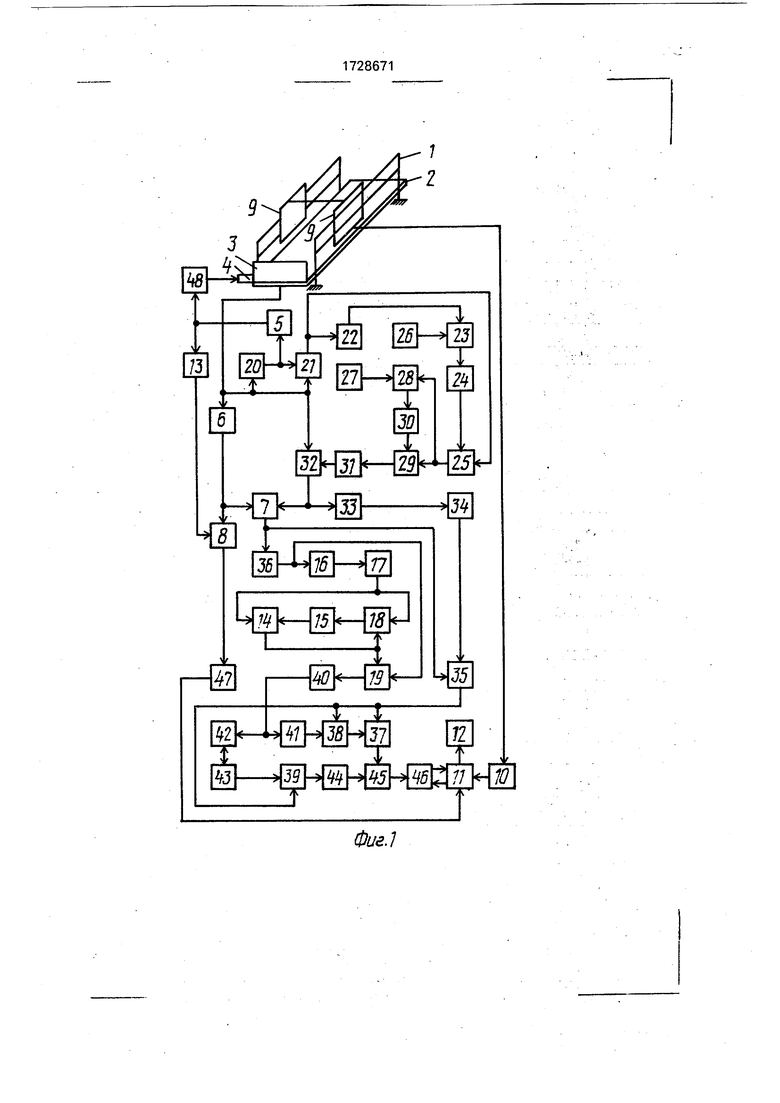
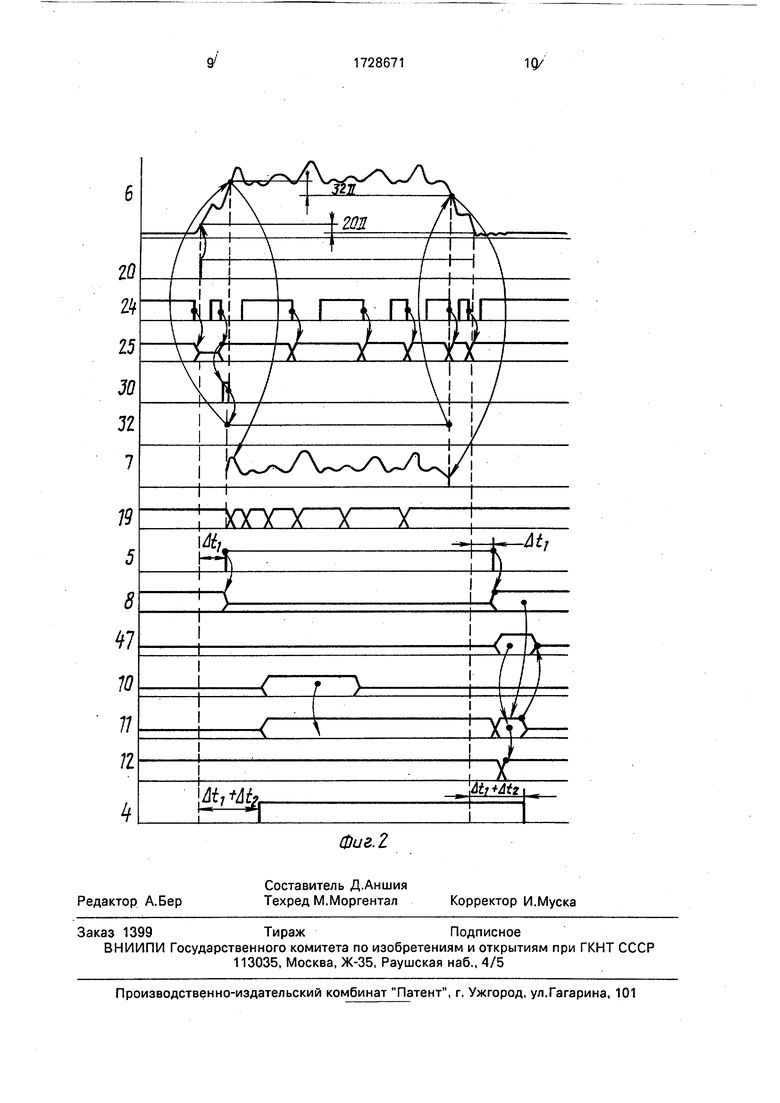
На фиг. 1 изображена структурная схема устройства для осуществления способа определения массы движущегося животного; на фиг. 2 изображены временные диаграммы, объясняющие работу этого устройства.
Устройство для измерения массы движущегося животного содержит ограждение 1, грузоприемную платформу 2, сопряженную с датчиком нагрузки, отсекатель 3 животных, выполненный с приводом 4, первый элемент задержки 5, аналого-цифровой преобразователь (АЦП) 6, подключенный входом к выходам датчиков нагрузки и выходом - к входам первого 7 и второго 8 ключевых элементов, антенну 9, сопряженную с ограждением 1, подключенную выходом к входу приемопередатчика информации 10, формирователь кода с памятью 11, подключенный первым входом к выходу приемопередатчика 10 и информационным выходом - к входу блока информации 12, первый логический элемент НЕ 13, подключенный входом к выходу первого элемента задержки 5 и выходом - к управляющему входу второго ключевого элемента 8, первый компаратор 14, подключенный к выходу первого блока памяти 15.
Также устройство для измерения массы движущегося животного содержит третий ключевой элемент 18, первый формирователь .адреса 16, подключенный выходом к входу блока памяти с автоинкрементом данных 17, выход которого подключен к входам первого компаратора 14 и третьего ключевого элемента 18, четвертый ключевой элемент 19, подключенный входом к выходу первого формирователя адреса 16. При этом выход первого компаратора 14 подключен к управляющим входам третьего 18 и четвертого 19 ключевых элементов. Выход третьего ключевого элемента 18 подключен к входу первого блока памяти 15.
Вход триггера Шмитта 20 подключен к выходам датчиков нагрузки, а его выход - к входу первого элемента задержки 5. Устройство содержит фильтр нижних частот с коммутатором 21, выход которого через блок дифференцирования 22 подключен к входу второго компаратора 23, выход которого
./
через второй логический элемент Н Е 24 подключен к управляющему входу первого блока усреднения 25, информационный вход которого подключен к выходу фильтра ниж- 5 них частот 21. Выход первого источника опорного сигнала 26 подключен к другому входу второго компаратора 23, а выход второго источника опорного сигнала 27 подключен к входу третьего компаратора 28,
10 другой вход которого подключен к выходу первого блока усреднения 25 и входу пятого ключевого элемента 29. Выход третьего компаратора 28 через одновибратор 30 подсое- динен к управляющему входу пятого
15 ключевого элемента 29, выход которого через блок масштабирования 31 подключен к управляющему входу настраиваемого триггера Шмитта 32.
При этом другой вход этого триггера
0 подключен к выходам датчиков нагрузки, а выход его подключен к управляющим входам первого ключевого элемента 7 и блока перезапуска 33, подключенного выходом через второй формирователь адреса 34 к
5 управляющему входу второго блока памяти 35, информационный вход которого подключен к выходу первого ключевого элемента 7. При этом выход первого ключевого элемента 7 соединен через сдвиговый регистр вправо
0 36 с выходом первого формирователя адреса 16, а выход второго блока памяти 35 соединен с входами шестого ключевого элемента 37, четвертого 38 и пятого 39 компараторов. Выход четвертого ключевого
5 элемента 19 через третий блок памяти 40 подключен к входам первого сдвигового регистра влево 41 и блока автоинкрементиро- вания 42, выход которого через второй сдвиговый регистр влево 43 соединен с дру0 гим входом пятого компаратора 39.
При этом выход первого сдвигового регистра влево 41 подключен к другому входу четвертого компаратора 38, выход которого подсоединен к управляющему входу шесто5 го ключевого элемента 37, а выход пятого компаратора 39 через третий логический элемент НЕ 44 подключен к управляющему входу седьмого ключевого элемента 45. Выход шестого ключевого элемента 37 подклю0 чен к входу седьмого ключевого элемента 45, выход которого подключен к информационному входу второго блока усреднения 46. При этом выход второго ключевого элемента 8 через третий блок усреднения 47 под5 ключей к второму входу формирователя кода с памятью 11, а выход второго блока усреднения 46 подключен к третьему входу формирователя кода с памятью 11, выход которого соединен с управляющим входом
второго блока усреднения 46. При этом выход привода 4 отсекателя 3 животных через второй элемент задержки 48 подключен к выходу первого элемента задержки 5. Вход разрешения фильтра нижних частот с коммутатором 21 подключен к выходу триггера Шмитта 20, а его информационный вход к выходу датчиков нагрузки.
Способ осуществляется следующим образом.
На грузоприемную платформу 2 животные входят по одному. В момент захода животного на платформу 2 в датчиках нагрузки возникает электрический сигнал, который через аналого-цифровой преобразователь 6 подается к первому ключевому элементу 7. При достижении электрического сигнала верхнего порога срабатывания триггера Шмитта 20, соответствующего наименьшему пределу измерения, открывается доступ сглаженного электрического сигнала (сглаживание осуществляет фильтр нижних частот со встроенным коммутатором 21, управление которым осуществляется через разрешающий вход) к блоку дифференцирования 22, а также после временной задержки (от первого элемента задержки 5 + от второго элемента задержки 48) срабатывает привод 4 отсекателя животных 3. Тот же самый сглаженный электрический сигнал с датчиков нагрузки поступает на первый блок усреднения 25, запуск и остановку работы которого осуществляет через второй логический элемент 24 НЕ второй компаратор 23, сравнивающий скорость изменения электрического сигнала, поступающего из блока дифференцирования 22, с допустимой скоростью изменения, задаваемой первым источником опорного сигнала 26. Таким образом, усреднение сглаженного электрического сигнала осуществляется только в те моменты времени, когда скорость изменения этого электрического сигнала не превышает допустимую.
Первый блок усреднения 25 может изменять свой выходной сигнал только синхронно с заданным фронтом сигнала, поступающего из второго логического элемента НЕ 24 (см. фиг. 2). Третий компаратор 28 сравнивает сигнал от первого блока усреднения 25 с наименьшим пределом измерения, задаваемым вторым источником опорного сигнала 27. Таким образом, обеспечивается запуск одновибратора 30, который своим вырабатываемым импульсом осуществляет кратковременное замыкание пятого ключевого элемента 29, который передает с первого блока усреднения 25 сигнал, соответствующий массе передней части туловища, на вход блока масштабирования 31. С этого блока поступающий сигнал на управляющий вход настраиваемого триггера 32 настраивает его верхний порог срабатывания на ожидаемую массу животного, а нижний порог - на максимально возможную ошибку настройки в сторону уменьшения и сохраняет до схода этого животного с грузоприемной платформы 2. Настраиваемый триггер Шмитта 32 открывает
0 первый ключевой элемент 7, который пропускает код сигнала от аналого-цифрового преобразователя 6 к сдвиговому регистру ./ вправо 36 и второму блоку памяти 35, осу- 5 ществляющий запоминание после до ватель5 ности этих кодов. Сдвиговый регистр 36 / осуществляет сдвиг кода вправо необходимое число раз, образуя таким образом интервал нечувствительности, и передает полученный код на первый формирователь
0 адреса 16. По полученному адресу блок памяти с автоинкрементом данных 17 увеличивает содержимое ячейки на единицу и передает ее содержимое на вход первого компаратора 14, который сравнивает с со5 держимым первого блока памяти 15. Если содержимое ячейки блока памяти с автоинкрементом данных больше, то содержимое первого блока памяти 15 через третий ключевой элемент 18 заменяется на новое, а
0 также через четвертый ключевой элемент 19 содержимое третьего блока памяти 40 тоже заменяется на новое. Таким образом, происходит выделение сдвинутой вправо моды (наиболее вероятного значения) из электри5 ческого сигнала, снимаемого с датчиков нагрузки, которое сохраняется в третьем блоке памяти 40.
После схода животного с грузоприемной платформы настрайвыаемый триггер
0 Шмитта 32 снимает свой выходной сигнал, что вызывает срабатывание блока перезапуска 33 второго формирователя адреса 34, который начинает последовательно перебирать адреса второго блока памяти 35, осу5 ществляя тем самым выдачу его содержимого на четвертый 28 и пятый 39 компараторы. Эти компараторы сравнивают данные, поступающие от второго блока памяти 35 с интервалом некачественно0 сти, который формирует первый сдвиговый регистр влево 41 (левый край интервал нечувствительности) и второй сдвиговый регистр влево через блок автоинкременти- рования 42 (правый край интервала нечув5 ствительности), причем количество сдвигов влево соответствует ранее проведенному число сдвигов вправо сдвиговым регистром 36. Данные от второго блока памяти 35 поступают на шестой 37 и седьмой 45 ключевые элементы, которыми управляют
четвертый компаратор 38 и. пятый компаратор 39 через третий логический элемент НЕ 44. тем самым пропуская только те данные, которые попадают внутрь интервала нечувствительности. Далее таким образом обра- ботанные данные попадают на вход второго блока усреднения 46, который подготавливает усредненный код для формирователя кода 11 с памятью, который после приема этого усредненного кода выдает сигнал под- тверждения, предназначенный для сброса от второго блока усреднения 46 (см. фиг. 2); Формирователь кода 11 с памятью из усредненного кода вычитает другой усредненный код, соответствующий массе пустой грузо- приемной платформы, который поступает из третьего блока усреднения 47 и принимается этим формирователем кода 11с памятью как только достигает установившегося (стационарного) значения.
Второй элемент задержки 48 через привод 4 препятствует поступлению животного на грузоприемную платформу 2, обеспечивая тем самым поступление кода, соответствующего массе пустой грузоприемной платформы через второй ключевой элемент 8 на третий блок усреднения 47, на промежуток времени после освобождения животным этой платформы 2. Окончательный код, соответствующий измеренной массе
животного, сопряженный с информацией о номере животного, поступившей из приемопередатчике 10, связанного с антенной 9, формирователь кода 11 с памятью передает на блок вывода информации 12. Ф о р м у л а и з о б р е т е н и я Способ определения массы животного, заключающийся в том, что производят многократное взвешивание животного путем перемещения через весовую платформу, а массу определяют усреднением полученных результатов, отличающийся тем,что, с целью повышения точности, при заступе животного на весовую платформу фиксируют сигнал весоизмерителя, запоминают его и определяют скорость его изменения, задают значение порогового уровня скорости изменения сигнала весоизмерителя, сравнивают его с текущим значением скорости изменения сигнала и в случае превы- шения текущим значением значения порогового уровня последнее текущее значение сигнала весоизмерителя умножают на заданный коэффициент, а полученное значение принимают за текущее значение, относительно которого устанавливают допустимый интервал отклонений, и исключают сигналы весоизмерителя, выходящие за его пределы, затем выделяют группу с наи большим числом сигналов.
Л2.7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регистрации массы движущегося животного | 1990 |
|
SU1704730A1 |
| Устройство для измерения массы движущегося животного | 1988 |
|
SU1569577A1 |
| Дискретное весоизмерительное устройство | 1980 |
|
SU932257A1 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1432340A1 |
| Устройство для отображения информацииНА эКРАНЕ элЕКТРОННО-лучЕВОй ТРубКи | 1979 |
|
SU805299A1 |
| Устройство для формирования и передачи сообщения | 1990 |
|
SU1778767A1 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2005 |
|
RU2288452C1 |
| Дельта-кодер | 1989 |
|
SU1612375A1 |
| Устройство для управления считыванием и вводом информации | 1990 |
|
SU1751786A1 |
Изобретение относится к весоизмерительной технике и позволяет повысить точность определения массы животного. Животное отделяют и при его заступе на весовую платформу фиксируют сигнал весоизмерителя, запоминают его и определяют скорость изменения, которую сравнивают с заданным пороговым значением. В случае превышения текущим значением порогового уровня последнее текущее значение сигнала весоизмерителя умножают на заданный коэффициент, относительно полученного результата устанавливают допустимый интервал отклонений и исключают сигналы весоизмерителя, выходящие за этот интервал, затем выделяют группу с наибольшим числом сигналов, которые усредняют для получения массы животного. СО С
| HIRSCHS | |||
| The desing of electronic stock weighing eguipment using a digital filtering technlgue for damping | |||
| Journal of Agricultural engineering research, 1985, vol | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Способ получения продукта конденсации бетанафтола с формальдегидом | 1923 |
|
SU131A1 |
| Lankow C., Freige K.-D | |||
| Mikrorech- hergestutzte Massebestimmung sirh bewegender Tiezc Messen-stevern-regeln | |||
| Berlin | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Эксцентричный фильтр-пресс для отжатия торфяной массы, подвергшейся коагулированию и т.п. работ | 1924 |
|
SU203A1 |
