4
ОС
ho
:00
14
Изобретение относится к весоизмерительной технике и может быть применено д„чя взвеи ивания перевозимых железнодорожным транспортом |-рузо11Отоков, в особенности технологических.
Цель изобретения - расширение функциональных возможностей путем обеспечения измерения веса подвижного состава при переменах движения (маневрах).
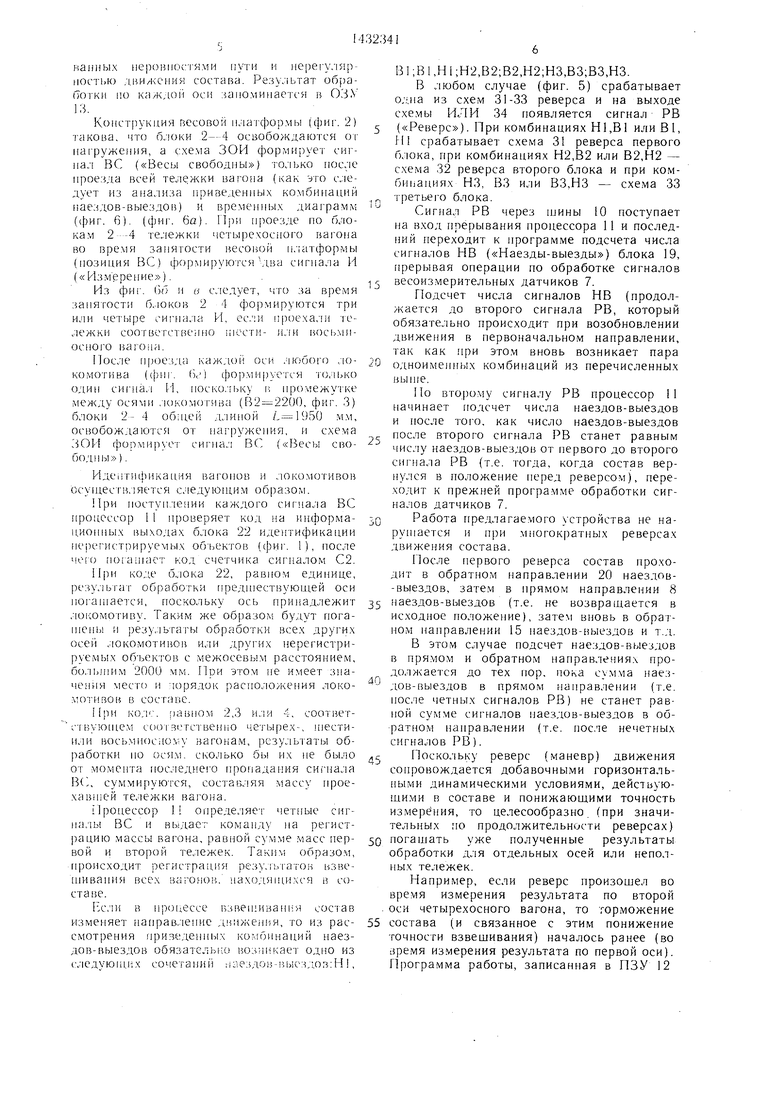
На фиг. 1 изображена блочно-кинемати- ческая схема устройства; на фиг. 2 -расположение грузоприемных блоков весовой платформы, вид в плане; на фиг. 3 - геометрические размеры вагонов и локомотивов отечественного парка, с которыми оперирует устройство; на фиг. 4 и 5 - варианты электрических принципиа.тьных схем эле.ментов устройства; на фиг. 6 - временные диагра.ммы, поясняющие принцип работы устройства.
Устройство содержит весовую платформу, выполненную в виде встроенных в рельсы
1железнодорожного пути измерительных грузов приемных 2 и 3 и грузопод ьемного 4 блоков. Длина измерительных грузоприе.м- ных блоков 2 и 3 может быть выбрана мм из тех соображений, чтобы на каждом блоке одновременно пе находилось более одного колеса, что облегчает определение наездов ко.лес па оси и выездов с пих.
Грузоподъемный блок 4 дополняет общую длину L весовой платформы до величины, большей типового межосевого расстояния вагонов, но меньше типового межосевого расстояния локомотивов (соответственно 1800-1850 мм и 2100-2200 мм согласно фиг. 3). Выбор длины весовой платформы, равной L, позволяет без применения каких- -либо дополнительных датчиков отличить вагон от локомотива, определять осность вагона или локомотива.
Измерительные грузоприемные 2,3 и грузоподъемный 4 блоки фиксируются в горизонтальной плоскости струнками-фиксаторами 5, соединяющими их с фундамент- блоками 6.
Измерительные грузоприемные блоки
2и 3 опираются на весоизмерительные датчики 7, связанные через ключевую схему 8 с .аналого-цифровым преобразователем 9, информационные выходы которого соединены через щины 10 с микропроцессорным вычислительным блоком в составе центрального процессора 11, постоянного запоминающего устройства (ПЗУ) 12, оперативного запоминающего устройства (ОЗУ) 13. Через интерфейс 14 вычислительный блок связан с регулируюпдим прибором 15 (например, цифропечатающей аппаратурой).
Весоизмерительные датчики 7 через компараторы 16 соединены с ключом 17 «Измерение, схе.мой 18 направления и блоком 19 формирователей наездов-выездов. К схеме 18 онределения направления движения подключен через компаратор 16 также весоизмерительный датчик 20 грузо- приемного блока 4.
Выходы блока 19 формирователей наездов-выездов ВС («Весы свободны) и НВ («Наезды-выезды) подключены к щинау 10 вычис тительного блока непосредственно, другие выходы связаны с щинами 10 через блок 21 реверса.
К выходу ключа 17 «Измерение подсое динен счетньш вход блока 23 идентификации нерегистрируемых объектов, выполненного в виде двоичного счетчика, например, К155ИЕ5, информационные выходы которого «Л, «В («Локомотив, «Вагон)
5 подключены к щинам 10, через последние также из вычислительного блока на вход гашения блока 11 поступает импульс сброса С2.
На фиг. 1, 4-6 обозначены: ПБ - «Правый Л Б - «Левый С Б -
0 «Средний И - «Измерение ; Л В - «Движение левое ; ПР - «Движение правое ; НВ - «Наезд-выезд ; Л - «Локомотив ; Б1 - «Первый 53 - «Третий ВС - «Весы свободы ; С1 - «Общий
г сброс ; РВ - «Реверс ; В - «Вагон ; И. Bj, - наезд или выезд оси , т.г. 110)вый, второй или третий блок.
Вариант исполнения схемы 18 определения направления движения и блока 19 формирователей наездов-выездов приведен на
0 фи --,4Схема 18 направления содержит, например, элементы 23 и 24 совпадения, триггеры 25 и 26 соответственно правого и левого направления, коммутатор 27.
Блок 19 формирователей наездов обра5 зован, например, емкостью С2 и резисторами RI, («наезд на первый блок - HI), емкостью СЗ и резисторами R.3, R.I («Наезд на третий блок - НЗ).
Формирователи выездов с первого и третьего грузоприемных блоков (81 и ВЗ) обР разованы соответственно емкостью С4 и резисторами Ry, R8, .а также емкостью С5 с резисторами Rci, Rio с использование.м инверторов 28.
Поскольку сигнал СБ («Средний
5 или блок 2, фиг. 1) не подвергается интервал инверсии в коммутаторе 27, то формирователь выездов с второго блока (В2) образован емкостью СЗ и резисторами RS, Re, а формирователь наездов (Н2) образован интертором 28, емкостью С6 -и резис0 торами Rii, Ri2.
Другими элементами блока 19 являются схемы ИЛИ 29, на выходе которых, объединенном резистором Rn, формируется сигнал НВ («Наезд-выезд) для вычислительного микропроцессорного блока, а также
5 схема ЗОИ, формирующая сигнал ВС («Весы свободны) при незанятых левом (ЛБ), правом (ПБ) и среднем (СБ) блоках 2-4. Блок 21 реверса (фиг. 5) содержит однотипные схемы 31-33 реверса соответственно первого, второго и третьего грузоприемных блоков. Выходы схем 31-33 объединены схемой ИЛИ 34, выход последней РВ («Реверс) подключен к шинам 10.
Каждая из схем 31-33 состоит, например, из схемы ИЛИ 35, триггеров 36 и 37, образующих регистр, входы гашения которого через диоды Vi-V4 связаны с выходами блока 19 формирователей наездов-выездов.Устройство работает следующим образом.
Перед началом взвешивания состава начальные сигналы ненагруженных весоизмерительных датчиков 7 измерительных гру- зоприемных блоков 2 и 3 поочередно подключаются через ключевую схему 8 к аналого-цифровому преобразователю 9. Коды, соответствующие начальным сигналам, поступая через шины 10 в ОЗУ 13, обрабатываются (усредняются) процессором 11 по программе, записанной в ПЗУ 12.
Результат усреднения помещается в ОЗУ 13 и при дальнейщих операциях вычитается из кодов нагруженных весоизмерительных датчиков 7, так что каждый раз опреде- ляется приращение сигнала от нагруже- ния датчиков 7 осью объекта.
Усреднение начальных кодов производится с определяемой программой работы цикличностью, например, один раз в час (при незанятых грузоприемных блоках 2 и 3).
Если слева (фиг. i) на измерительный грузоприемный блок 3 наезжает первое колесо состава, безразлично локомотива или вагона, то нагружается нижний весоизмерительный датчи-к 7 и на схему 18 направления с компаратора 6 поступает сигнал ЛБ («Левый блок). Через элемент 23 совпадения (фиг. 4) возбуждается триггер 25 правого направления, запрещая на все время взвешивания данного состава прохождение сигналов ПБ («Правый блок) через элемент 24 совпадения. На верх- нем (фиг. 4) выходе коммутатора 27 формируется сигнал Б1 («Первый блок), а на выходе формирователя наездов, состоящего из емкости С2 резисторов Ri, R формируется короткий импульс HI («Наезд на пер- вый блок).
С этого момента на время взвешивания данного состава блоку 3 присваивается номер 1, блоку 4 - номер 3 (блок 2 всегда второй), а на , шины 10 вычислительного 6vTOKa поступает сигнал ПР («Движение правое). Триггеры 25, 26 могут быть установлены в исходное положение готовности к новому циклу взвешивания подачей импульса С1 («Общий сброс), формируемого центральным процессором 11 по алгоритму, который приведен в конце описания.
В процессе дальнейшего движения состава по блокам 2-4 последовательно формируются в соответствии с размерами и
расположением блоков 2-4 (фиг. 2) и геометрическими размерами объектов (фиг. 3) короткие импульсы наездов Н,-. (, 1,2,3) и выездов В,- (; 1,2,3).
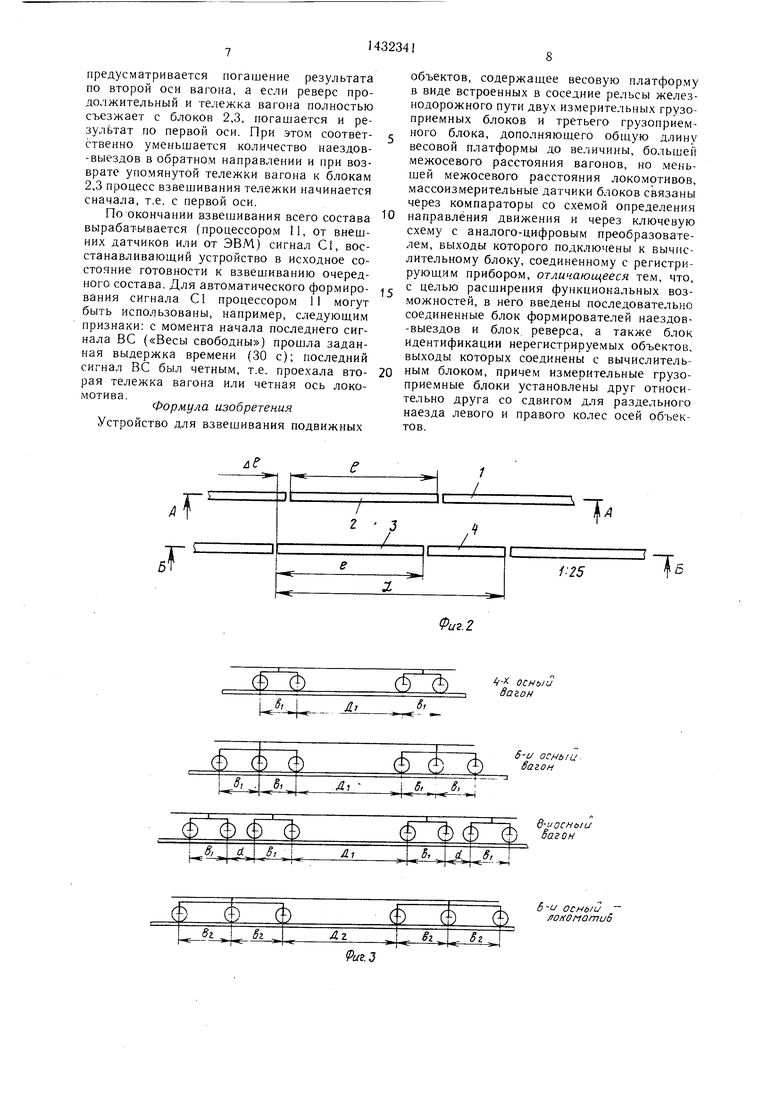
При проезде по блокам 2-4 любой из двух тележек четырехосного объекта (фиг. 3) возникает следующая последовательность наездов и выездов (позиции СБ, ЛБ, ПБ, фиг. 6а):Н1,Н2,В1,НЗ,В2,Н1,Н2,ВЗ,В1-,НЗ,В2 ВЗ.
Соответствующие последовательности при проезде тележки шестиосного объекта (позиции СБ,ЛБ,ПБ, фиг. 66) :Н1,Н2,В1, НЗ,В2,Н1,Н2,ВЗ,В,НЗ,В2,Н2,ВЗ,В1,НЗ,В2, ВЗ; и тележки восьмиосного объекта (позиции СБ,ЛБ,ПБ, фиг. 68):Н1,Н2,В1,НЗ,В2, Н1,Н2,ВЗ,В1,НЗ,В2,Н,Н2,ВЗ,В1,НЗ,В2,Н1, Н2,ВЗ,В1,НЗ,В2,ВЗ.
При проезде любой оси локомотива (безразлично, четырех- или шестиосного) Н,Н2,В,НЗ,В2,ВЗ (позиции СБ,ЛБ,ПБ, фиг. 6г для двух осей локомотива) весовая платформа (фиг. 2) имеет два отлич- чительных свойства.
В приведенных последовательностях нигде нет рядом стоящих наездов и выездов одного блока (т.е. Н,В1 или наоборот; Н2,В2 или наоборот; НЗ,ВЗ или наоборот). Эта особенность позволяет безошибочно определить реверс движения состава во всех случаях (подробно это рассмотрено при описании работы блока 21 реверса).
Кроме того, выш еприведенные пос.тедо- вательности наездов-выездов не зависят от направления движения, что позволяе 1 использовать один и тот же алгоритм распознавания реверса как для случая правого движения, так и для случая левого движения.
При левом направлении движения (фиг. 2) блоку 4 в соответствии с описанным принципом работы схемы 18 определения направления движения будет присвоен номер один, а блоку 3 - номер три т.е. приведенные комбинации останутся прежними, так как чередование нагружения и разгружения блоков 2-4 при движении оси по весовой платформе останется прежним.
Таким образом, процесс взвешивания объекта заключается в измерении, т.е. в обработке по одному нз известных алгоритмов, сигналов весоизмерительных датчиков 7 и в управлении потоком обработанных результатов по отдельным осям.
Измерение сигналов весоизмерительных датчиков 7 производится по сигналам И («Измерение) ключа 17 измерения, т.е. всякий раз, когда нагружаются оба измерительных грузоприемных блока 2 и 3. Обработка сигналов датчиков 7 производится процессором 1 по одному из известных алгоритмов, записанному в ПЗУ 12, например по алгоритму, обеспечивающему фильтрацию от нестационарных помех, вызманных неровностями нутн и iiepei V. iHp- ностью днижсмия состава. Результат oofia- потки каждой ocii заномннается в ОЗУ 13.
Конструкция rsecoBoii нлатфор.мы (фиг. 2) такова, что блоки 2-4 освобождаются от нагружения, а с.хема ЗОИ формирует сигнал ВС («Весы свободны) только носле проезда всей тележки вагона (как это следует из анализа ириве.аенных комбинаций наездов-выездов) и временных диаграмм ((})иг. 6). (фиг. 6а). Г1ри проезде но блокам 2-4 те,лежк11 четырехосного вагона во время занятости 15есовой н.чатформы (позиция ВС) формирую 1 ся два сигнала И («Измерение).
Из фи1-. ()б и и следует, что за время занятости 6..IOKOB 2 4 формируются три или четыре сигна.а И, ес.чи )exa,iii тележки соответственно IHC-CTH- и.л.ч вось.ми- ocHOi O Barotia.
Иосле н|)ое:,да каждой оси . iioGoi o ,-io- ко.мотива (()иг. (() (нормируется то. один сигиа. И, носко.чьку г; нромежу 1 ке между осями . юкомотива (В2 22()(), фиг. 3) блоки 2- 4 общей д.линой /. 1950 м.м, освобождаются от нагружения, и схема ЗОИ формирует сигна.л ВС («Весы свободны ).
Идентис1)икания вагоиов и ..IOKOMOTHBOI осуществляется следующим образом.
Ири иостунлении каждого сигнала ВС процессор 11 проверяет код на информационных выходах блока 22 идентификации не|)егистрируемых об ьектов (. 1), носле чего 1О -аи1ает код счетчика сигналом С2.
11ри ко;:.е б..10ка 22, равном единице, результат об)аботки предшествующей оси погашается, носкольку ось нринадлежит .локомотиву. Таким же образом будут нога- Hieiibi и результаты обработки все.ч других осей .ЛОКОМОТИВО1 или других нерегистрируемых обт.ектов е межосевым расстоянием, бол))ним 2000 мм. При этом не имеет значения место и дорядок расноложения локомотивов в составе.
При ко; . ;. авном 2,3 и;1И 4, соответ- ;-т1:;ую цем со(.)тзетстве1Н1О четырех-, 1нести- или BOCbMHociiovy вагонам, результаты обработки но ося.м. сколько бы их не было от момента носледнегю пропадания сигна;1а ВС, суммируются, составляя массу проехавшей тележки вагона.
Процессор И онре;.1еляет четные сиг- ВС и вы;1ает команду иа регистрацию массы вагона, равной с} мме масс нер- вой и второй тележек. Такшм образом, 1роисхо;1ит регистрац1 я резу.гьтатон взвешивания всех вагонов. иахо;|ян1ихся в составе.
Рл ;1И в iipoiiecce ьзвешиван1:я состав изменяет наирав.ление движения, то из рассмотрения призе;1.енньгх комбинаций наез- дов-выез;.1ов обязательп.о возш кает одно из c. ieдyюш.lix сочетаний :1аез;10в-в1 1ез;1Оз:Н,
5
0
О
0
5
В1 ;В 1 ,Н 1 ;Н2,В2;В2,Н2;НЗ,ВЗ;ВЗ,НЗ.
В любом случае (фиг. 5) срабатывает о;. на из схем 31-33 реверса и на вы.ходе схемы ИЛИ 34 появляется сигнал РВ («Реверс). При комбинациях Н1,В1 или В1, П срабатывает схема 31 реверса первого блока, нри комбинациях Н2,В2 или В2,Н2 - схема 32 реверса второго блока и при комбинациях НЗ, ВЗ или ВЗ,НЗ - схема 33 третьего блока.
Сигнал РВ через ИJИны 10 поступает на вход прерывания процессора 11 и последний переходит к программе подсчета числа сигналов НВ («Наезды-выезды) блока 19, прерывая операции по обработке сигналов весоизмерительных датчиков 7.
Подсчет числа сигналов НВ (продолжается до второго сигнала РВ, который обязательно происходит при возобновлении ;1.вижения в первоначальном направлении, так как при этом вновь возникает пара о;1ноименных комбинаций из перечисленных выше.
По второму сигналу РВ процессор 11 начинает подсчет числа наездов-выездов и носле того, как число наездов-выездов носле второго сигнала РВ станет равным числу наездов-выез;дов от нервого до второго сигнала РВ (т.е. тогда, когда состав вернулся в положение перед реверсом), переходит к прежней программе обработки сигналов датчиков 7.
Работа ripe;yiarae.Moro устройства не на- рун1ается и при многократных реверсах ;1вижения состава.
После нервого реверса состав нрохо- дит в обратном направлении 20 наездов- -выездов, зате.м в прямом направлении 8 наездов-выездов (т.е. не возвращается в исходное положение), затем В1ювь в обратном направлении 15 наездов-выездов и т.;ь
В этом случае подсчет наездов-выез;1ов в прямом и обратном направлениях про- ;1олжается до тех пор, пока сумма наез- ;1ов-выездов в прямо.м направлении (т.е. носле четных сигналов РВ) не станет равной сумме сигналов 1аез;юв-выездов в обратном нанравлении (т.е. после нечетных сигналов РВ).
Поскольку реверс (маневр) движения сопровождается добавочными горизонтальными динамически.ми условиями, действующими в составе и понижающими точность измерения, то целесообразно, (при значительных по продолжительности реверсах) погашать уже полученные результаты обработки для отдельных осей или неполных тележек.
Например, если реверс произошел во время измерения результата по второй оси четырехосного вагона, то торможение состава (и связанное с этим понижение точности взвешивания) началось ранее (во время измерения результата по первой оси). Программа работы, записанная в ПЗУ 12
предусматривается погашение результата по второй оси вагона, а если реверс продолжительный и тележка вагона полностью съезжает с блоков 2,3, погашается и результат по первой оси. При этом соответ- ственно уменьшается количество наездов- -выездов в обратном направлении и при возврате упомянутой тележки вагона к блокам 2,3 процесс взвешивания тележки начинается сначала, т.е. с первой оси.
По окончании взвешивания всего состава вырабатывается (процессором 11, от внешних датчиков или от ЭВМ) сигнал С1, восстанавливающий устройство в исходное состояние готовности к взвешиванию очередного состава. Для автоматического формиро- вания сигнала С1 процессором 11 могут быть использованы, например, следующим признаки: с момента начала последнего сигнала ВС («Весы свободны) прошла заданная выдержка времени (30 с); последний сигнал ВС был четным, т.е. прое.хала вто- рая тележка вагона или четная ось локомотива.
Формула изобретения
Устройство для взвешивания подвижных
объектов, содержащее весовую платфор.му в виде встроенных в соседние рельсы железнодорожного пути двух измерительных грузо- приемных блоков и третьего грузоприем- ного блока, дополняющего общую длину весовой платформы до ве.личины, большей межосевого расстояния вагонов, но Meiib- шей межосевого расстояния локомотивов, массоизмерительные датчики блоков связаны через компараторы со схемой определения направления движения и через ключевую схему с аналого-цифровым преобразователем, выходы которого подключены к вычислительному блоку, соединенному с регистрирующим прибором, отличающееся тем, что, с целью расширения функциональных возможностей, в него введены последовательно соединенные блок формирователей наездов- -выездов и блок реверса, а также блок идентификации нерегистрируемых объектов, выходы которых соединены с вычислительным блоком, приче.м измерительные грузо- приемные блоки установлены друг относительно друга со сдвигом для раздельного наезда левого и правого колес осей объектов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ взвешивания подвижных объектов | 1986 |
|
SU1453179A1 |
| Устройство для поколесного взвешивания объектов | 1986 |
|
SU1408234A1 |
| Устройство для взвешивания железнодорожного подвижного состава | 1984 |
|
SU1234728A1 |
| Способ поколесного взвешивания подвижных объектов | 1986 |
|
SU1372194A1 |
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
| Устройство для потележечного взвешивания железнодорожного подвижного состава | 1985 |
|
SU1285324A1 |
| Устройство для поосного взвешивания подвижного состава | 1986 |
|
SU1315822A1 |
| Устройство для поосного взвешивания подвижных объектов | 1989 |
|
SU1702185A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2390735C1 |

Изобретение позволяет измерять массу подвижного железнодорожного состава при неремена.х направления движения (маневрах). Перед началом взвешивания сигналь о ненагруженных весоизмерительных датчиков 7 грузоприемных блоков 2 и 3 поочередно чере;; с.хему 8 подключаются к .АЦП 9. Поступая через Н1ину 10 в ОЗУ 13, данные усредняются процессоро.м 1 1 по программе, написанной в ПЗУ 12. Результат усреднения номещается в ОЗУ 13 и в дальнейн ем вычитается из кодов на руженных датчиков 7. Измерение сигна.юв датчиков 7 производится но сигналам ключа 17 измерения, т.е .ри загрузке обоих 1атчи чов, Схема 18 направления движения чепсз олок 9 формирования наездов-вь;сз.;о|-; ствуют на вход блока 21 . прерывает микропроцессор н Юграм.мы по.;счст: ciiri; (наезды-1;ыс i I. 2J 011|)еделяе1. (;; v-iniia.; i НЫХ .laT iiiKCJiи ад. 1ежи i ВПЧ.иМ - ix v;Ojibl i 1 i л.1Я iaiiyr-.. ()-Л .. ;j i i Л : .::;- iKa:;i:l ..ti4i: - Mep;- ГС.;: , iOKONKr; H, другому . iepej-Hc-ipHpyeMOMX объект). Резуль- тагы работы обрабатывающих npoi-рам через интерфейс 14 поступают на регист рирующий прибор 15. 6 пл.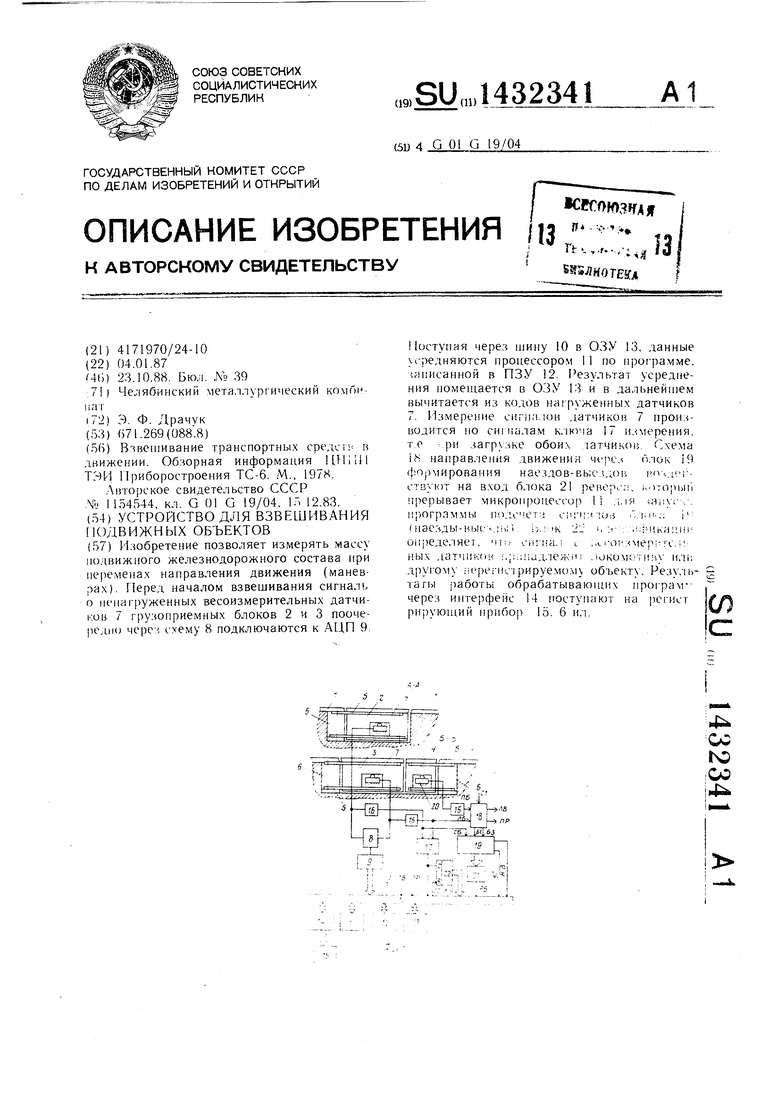
осныи BazoH
6 U осныи
Н
в-иОСНй/и
Вагон
6-и осныи /JOHOMomuS
+ //
+ /
Ось 1 ОсьТ
3с
а
Ось
Ось
JL
осы
ось 7
осьг
ЛL
осы
Ось 2
JL
Г
Ось
Ось 2
Ось
Ось 2
ОсЫ
г
11
Ось 2
сь 2
ГП
j)6
т
5Г
И
сь 2
Ось 3
сь 2
I Г
J
4i
§
н
Ось 3
L
Ось 2
М
ОсьЗ
1М
14
§
/
ОсьЗ
Ось чki
L
SC6 3
1-л:
1 5
ffC6
Ось 2
JQcbd
1 Б
ОСЬ ч
ПБ
ВС
::s
ЛБ
Ось 2
вс
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| М., 1978 | |||
| .Авторское свидетельство СССР | |||
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
