«
Изобретение относится к весоизмерительной технике.
Цель изобретения - повьшение надежности за счет исключения пропусков при регистрации наездов и выездов осей.
На фиг. 1 представлена структурна блок-схема устройства; на фиг. 2 - принципиальная электрическая схема сигнализатора наезда и выезда; на фиг. 3 - графики нагружения весоизмерительных датчиков, поясняклдае работу устройства.
Устройство для взвешивания железнодорожного подвижного состава в движении содержит встроенную в железнодорожный путь 1 грузоприемную платформу 2, установленную на весоизмерительные датчики 3, расположенные на одном краю платформы 2, и на весоизмерительные датчики 4, расположенные на другом краю. Датчики 3 подсоединены к усилителю 5, а датчики 4 - к усилителю 6, вькоды которых подсое динены к вычислительному блоку 7. Выходы усилителей 5 и 6 подключены также к сигнализаторам 8 и 9 наезда и выезда осей и к сигнализатору 10 нуля.
Выходы Наезд (HI и Н2) сигнализаторов 8 и 9 подключены к блоку 11 фиксации направления движения, шина Сброс которого соединена с выходом сигнализатора 10 нуля, Блок 11 представляет собой два триггера (не показано) , причем триггер в начале работы возбуждающийся первым, блокируе срабатывание второго триггера вплоть до поступления сигнала Сброс. Выходы триггеров Т и Б (тара и брутто) определяют при использовании в большинстве технологических потоков реквизит груза и подключены к мультиплексору 12 и к вычислительному блоку 7.
Мультиплексор 12, представлякшщй собой, например, микросхему К 155 ЛР1,выбирает на все время прохождения данного состава по весам, один из выходов Наезд сигнализатора 8 (иди 9) и выход Выезд сигнализатора ; (или 8). Таким образом, импульсы Н (Наезд) во все время взвешивания одного состава поступают от одного из сигнализаторов 8 и 9, а импульсы В (Выезд) - от другого. .
Выходы Н и В (Наезд и Выезд) соединены с входами блока 13 идентифи230462
кации, содержание которого может быть различным в зависимости от технологии и типов применяемых транспортных объектов 14.
Входы блока 13 И (Инициатива), Р (Регистрация) и Г (Гашение) подключаются к вычислительному блоку 7,
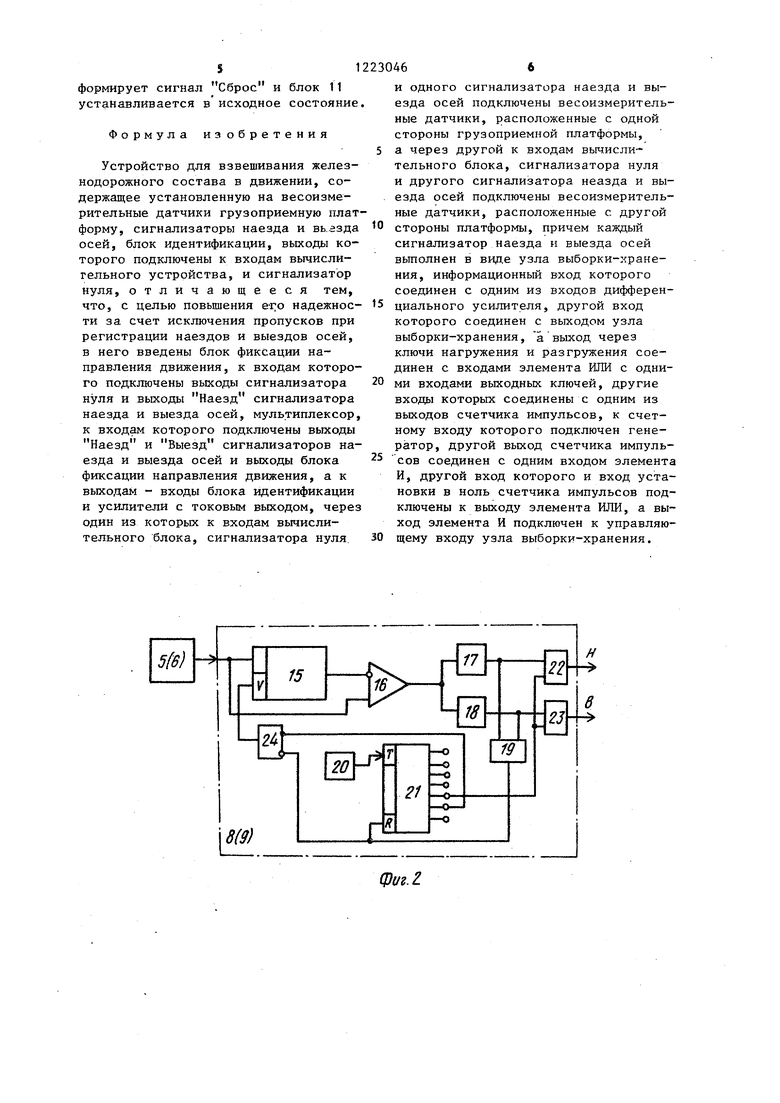
Электрическая схема сигнализаторов 8 (9) показана на фиг. 2., Каж0 дый из них содержит подключенный на выход усилителя 5 (6) узел 15 выборки- хранения, дифференциальный усилитель 16, ключ 17 нагружения, ключ 18 раз- гружения, элемент ИЛИ 19, генератор
5 20, подключенньй к счетному входу Т счетчика 21, выбранный выход которого подключен на входы выходных ключей 22 и 23 соответственно, наезда и выезда, а последующий выход - на
0 элемент И 24.
Генератор 20 и счетчик 21 образуют узел выдержки времени.
Устройство работает следующим образом.
5 При наезде транспортных объектов 14 на грузоприемную платформу 2, например, слева направо (фиг. 1), весоизмерительные датчики 3 и 4 нагружаются в примерном соответствии с
0 фиг. 3, показывающей нагружение датчика 3 (позиция а. ), и датчика 4 (позиция 6 ) для случая взвешивания чугуновозов с жидким чугуном. На позиции 6 (фиг. 3) показано суммарное
с нагружение платформы 2, т.е. сумма сигналов датчиков 3 и 4.
Через усилители 5 и 6 с токовым выходом сигналы весоизмерительных датчиков поступают на вычислительный блок 7, где обрабатьшаются по командам блока 13 идентификации по одному из известных алгоритмов.
Сигнализаторы 8 и 9 фиксируют моменты наезда и выезда следукнцим образом.
Пусть в момент времени t (фиг.З) происходит наезд на платформу 2 первой оси объекта 14 (например, чугу- ;новоза, а в моменты t , t, въезжают следукнцие оси, так что с момента t до.t чугуновоз находится на платформе 2 всеми четырьмя осями. В момент t блок 13 вьздает инициативный сигнал на измерение (И), ко- 5 торьй продолжается до момента t , когда с платформы 2 съезжает первая ось первого чугуновоза и наезжает первая ось следующего чугуновоза.
0
5
0
В моменты времени t , t , t съезжают вторая, третья и четвертая оси первого чугуновоза и наезжают соответствующие оси второго чугуновоза, так что с момента t вновь блоком 13 вьщается инициативный сигнал И на обработку сигнала весоизмерительных датчиков 3 и 4 в вычислительном устройстве 7.
Моменты наездов (позиция d на фиг. 2) и выездов (позиция 6 ) могут практически совместиться в любой из моментов ( t ) в зависимости от
8
ДЛИНЫ платформы 2 и межосевых расстояний.
При совмещении наездов и выездов по суммарной диаграмме нагружения платформы 2 невозможно установить был или не бьш наезд или выезд, так как соответствующий спад (моменты t,t, t) или выброс (момент ц) :длится весьма короткий промежуток времени и нельзя уверенно отличить его от имеющих место импульсных или динамических помех.
В то же время по диаграмме нагру- жения левого датчика 3 (позиция а на фиг. 3) и правого датчика 4 (позиция 5 на фиг. 3) наезда и выезды фиксируются уверенно.
Сигнал датчика 3 через усилитель 5 поступает на сигнализатор 8, т.е. на вход узла 15 выборки-хранения, представляющего собой следящий интегратор на операционном усилителе, отключаемый от сигнала по входу V с запоминанием значения сигнала,предшествующего моменту отключения. Узел 15 выборки-хранения постоянно открыт по входу V и отслеживает уровень входного сигнала.
При появлении в момент времени t скачка входного сигнала благодаря интегральным свойствам узла 15 на входах дифференциального усилителя 16 появляется сигнал разбаланса,так как сигнал на инверсном входе запаз- дьшает по отношению к сигналу на прямом входе, снимаемому непосредственно с выхода усилителя 5. Вследствие этого на выходе дифференциального усилителя 16 появляется сигнал положительного знака, срабатьшает ключ 17И нагружения. Элемент ИЛИ 19 снимает гашение с входа R-счетчика 21 и через элемент И 24 запирается узел 15 выборки-хранения.
Начинает работать а.г ньщержки времени, состоящий из генератора 20 и счетчика 21. Если скачок, происшедший в момент времени t, достаточно
.продолжителен и не исчезает, пока на выбранном (например, восьмом) выходе счетчика 21 не появляется импульс, то, следовательно, действительно имеет место наезд, что и будет за-
фиксировано в момент времени t а сигналом с последующего (например, девятого) выхода счетчика 21 через элемент И 24 узел 15 выборки-хранения открьшается по входу V, выходя
на новый уровень сигнала и отслеживания его до момента времени t , когда будет зарегистрирован новый наезд, так же, как это описано выше. Аналогично до момента времени tg
сигнализатор 9 отслеживает сигнал датчика 4 с правого конца платформы 2. В момент времени ty запирается узел 15 выборки-хранения сигнализатора 9, а в момент времени t регистрируется выезд оси с платформы .2. Таким образом, сигнализаторы 8 и 9, работая автономно, фиксируют наезды . выезды, хотя бы они и происходили одновременно.
Выходы Наезд Н и Выезд f сигнализаторов 8 и 9 (фиг, 1) подключены к мультиплексору 12, управляемому блоком 11 фиксации направления движения .
Блок 11 направления представляет собой два триггера, взаимно блокирующие один другого, так что на все время прохождения состава по платформе 2 определяется направление движения, что в болыпинстве случаев однозначно характеризует род груза (тара - Т, брутто - Б на фиг. 1).
Управляющие сигналы Т и Б блока 11 коммутируют в мультиплексоре 12 сигналы HI, Н2 и В1, В2 сигнализаторов 8 и 9 в сигналы соответственно И и В на выходе мультиплексора 12. Таким образом, если состав движется слева направо (фиг. 1), то наеэды регистрирзтотся только сигнализатором
8,а выезды - только сигнализатором
9,чем облегчаются условия работы (например, установка порога срабатывания дифференциального усилителя 16) и надежность работы схемы.
По окончании прохода состава по платформе 2- сигнализатор 10 нуля
формирует сигнал Сброс и блок 11 устанавливается в исходное состояние.
Формула изобретения
Устройство для взвешивания железнодорожного состава в движении, содержащее установленную на весоизмерительные датчики грузоприемную платформу, сигнализаторы наезда и вь.гзда осей, блок идентификации, выходы которого подключены к входам вычислительного устройства, и сигнализатор нуля, отличающееся тем, что, с целью повышения надежности за счет исключения пропусков при регистрации наездов и выездов осей, в него введены блок фиксации направления движения, к входам которого подключены выходы сигнализатора нуля и выходы Наезд сигнализатора наезда и выезда осей, мультиплексор, к входам которого подключены выходы Наезд и Выезд сигнализаторов наезда и выезда осей и выходы блока фиксации направления движения, а к выходам - входы блока идентификации и усилители с токовым выходом, через один из которых к входам вычислительного блока, сигнализатора нуля.
И одного сигнализатора наезда и выезда осей подключены весоизмерительные датчики, расположенные с одной стороны грузоприемной платформы, а через другой к входам вьгаисли- тельного блока, сигнализатора нуля и другого сигнализатора неазда и выезда осей подключены весоизмерительные датчики, расположенные с другой стороны платформы, причем каждый сигнализатор наезда и выезда осей выполнен в виде узла выборки-хранения, информационный вход которого соединен с одним из входов дифференциального усилителя, другой вход которого соединен с выходом узла выборки-хранения, а выход через ключи нагружения и разгружения соединен с входами элемента ИЛИ с одними входами выходных ключей, другие входы которых соединены с одним из выходов счетчика импульсов, к счетному входу которого подключен генератор, другой вьсход счетчика импульсов соединен с одним входом элемента И, другой вход которого и вход установки в ноль счетчика импульсов подключены к выходу элемента ИЛИ, а выход элемента И подключен к управляющему входу узла выборки-хранения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания транспортных объектов в движении | 1984 |
|
SU1236322A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Устройство для потележечного взвешивания железнодорожного подвижного состава | 1985 |
|
SU1285324A1 |
| Устройство для поосного взвешивания железнодорожного состава в движении | 1984 |
|
SU1229586A1 |
| Устройство для взвешивания железнодорожного подвижного состава | 1984 |
|
SU1234728A1 |
| Способ взвешивания подвижных объектов | 1986 |
|
SU1453179A1 |
| Устройство для взвешивания железнодорожного подвижного состава во время движения | 1982 |
|
SU1046621A1 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Устройство для потележечного взвешивания вагонов в движении | 1982 |
|
SU1027530A1 |

Изобретение относится к весоизмерительной технике.Цель изобретения - повышение надежности устройства. Устройство содержит весоизмерительные датчики 3 и 4, усилители 5 и 6, вычислительный блок 7, сигнализаторы 8 и 9, сигнализатор 10 нуля. В устройство введены блок 11 фиксации направления движения, мультиплексор 12 и блок 13 индентификации, соединенные между собой и другими элементами устройства определенным образом, что позволяет исключить пропуски при регистрации наездов и выездов осей. 3 ил. ) . /1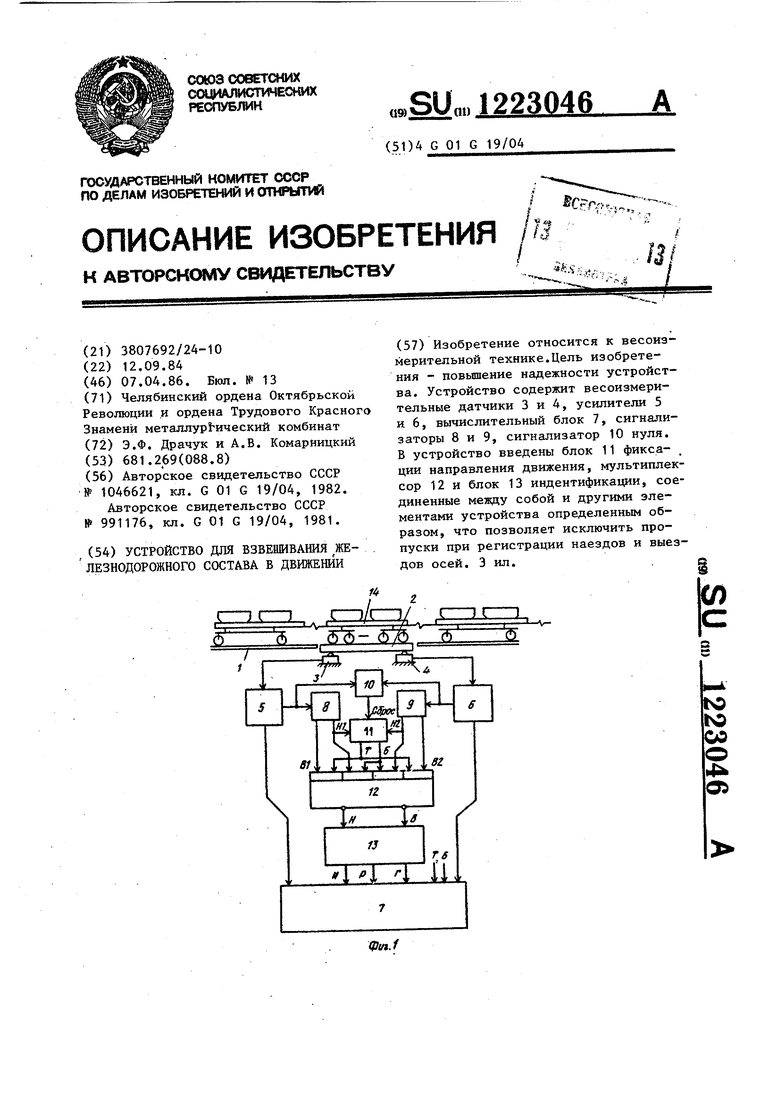
Н
Фиг. 2.
а
Фиг.З
| Устройство для взвешивания железнодорожного подвижного состава во время движения | 1982 |
|
SU1046621A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для повагонного взвешивания транспортных объектов на ходу | 1981 |
|
SU991176A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
