Изобретение относится к области автоматики, в частности к устройству для определения положения объекта на изображении и может быть использовано в системах распознавания и совмещения изображений движущихся объектов.
Цель изобретения состоит в повышении точности и упрощении устройства.
На фиг.1 представлена блок-схема устройства; на фиг.2 - пример конструктивного вьтолнения коррелятора; на фиг.З - то же, блока определения координатj на фиг.4 - то же, блока временного сглаживания; на фиг.З - то же, блока управления; на фиг.6-11 - временные диаграммы управляющих сигналов, поясняющие работу сигнала.
Устройство (фиг.1) содержит первый блок 1 памяти,блок 2 временного сглаживания, коммутатор 3, блок 4 управления, второй блок 5 памяти,- коррелятор 6, блок 7 определения координат.
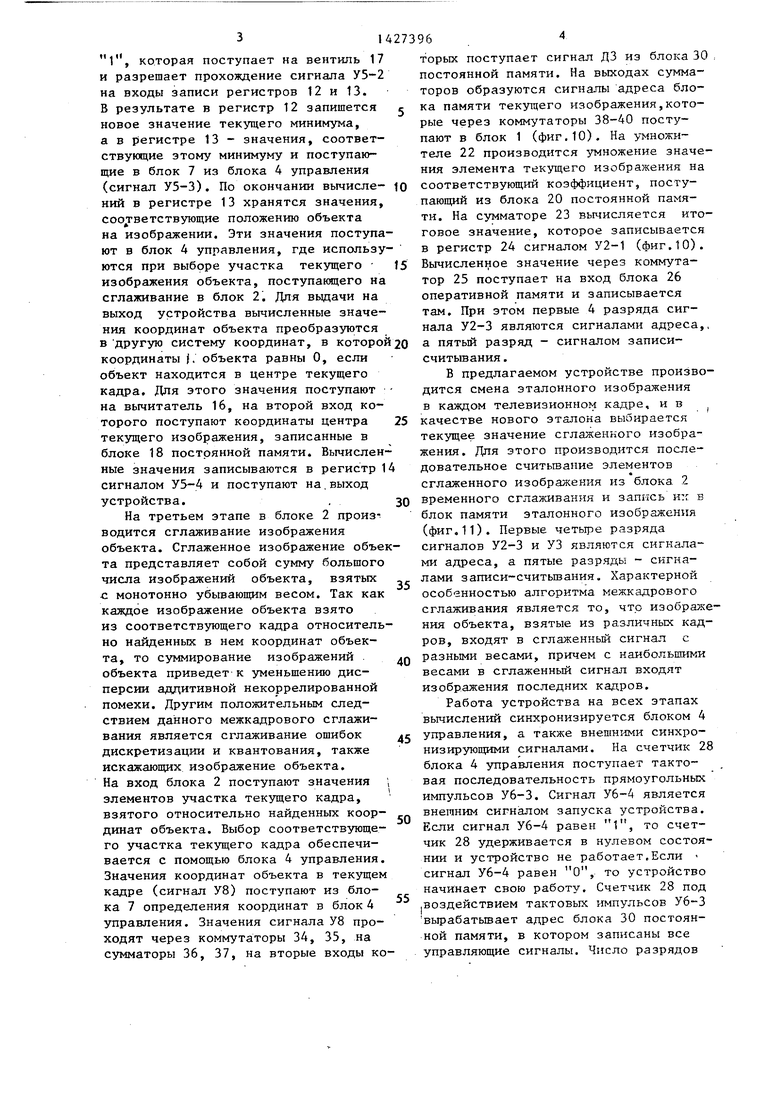
Коррелятор 6 (фиг.2) содержит вы- читатель 8, блок 9 постоянной памяти, сумматор 10 и регистр 11.
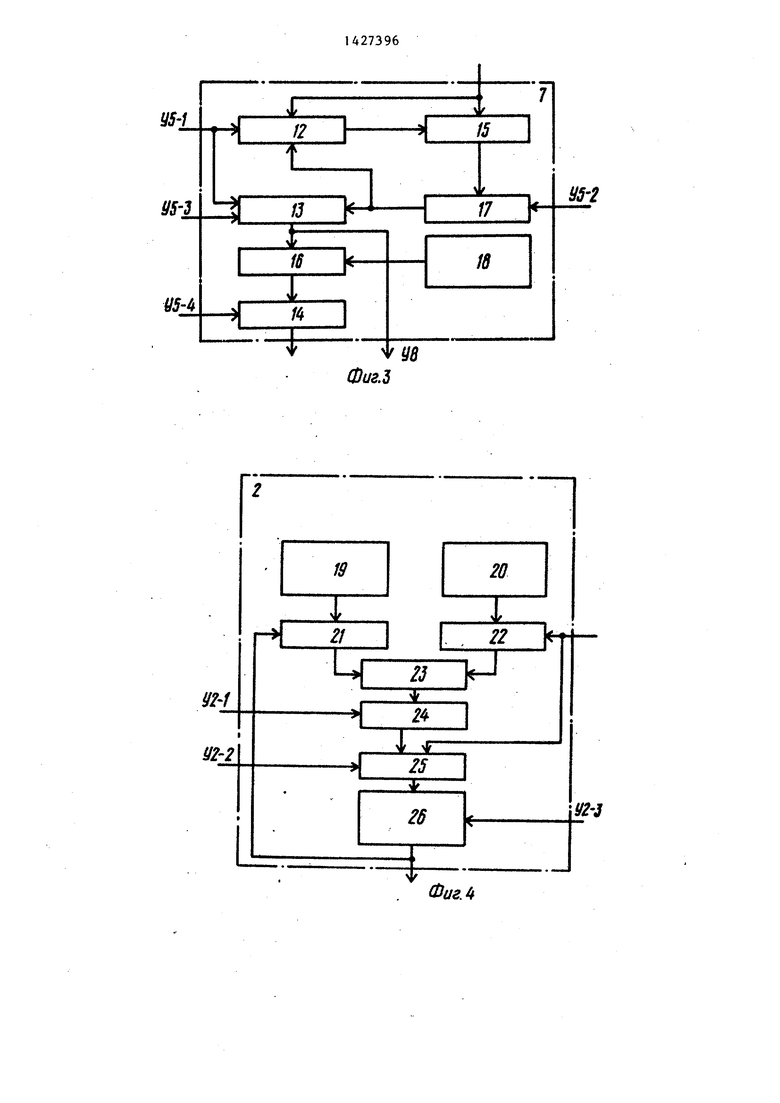
Блок 7 определения координат (фиг.З) содержит регистры 12-14, вы- читатели 15, 16, вентиль 17 и блок 18 постоянной памяти.
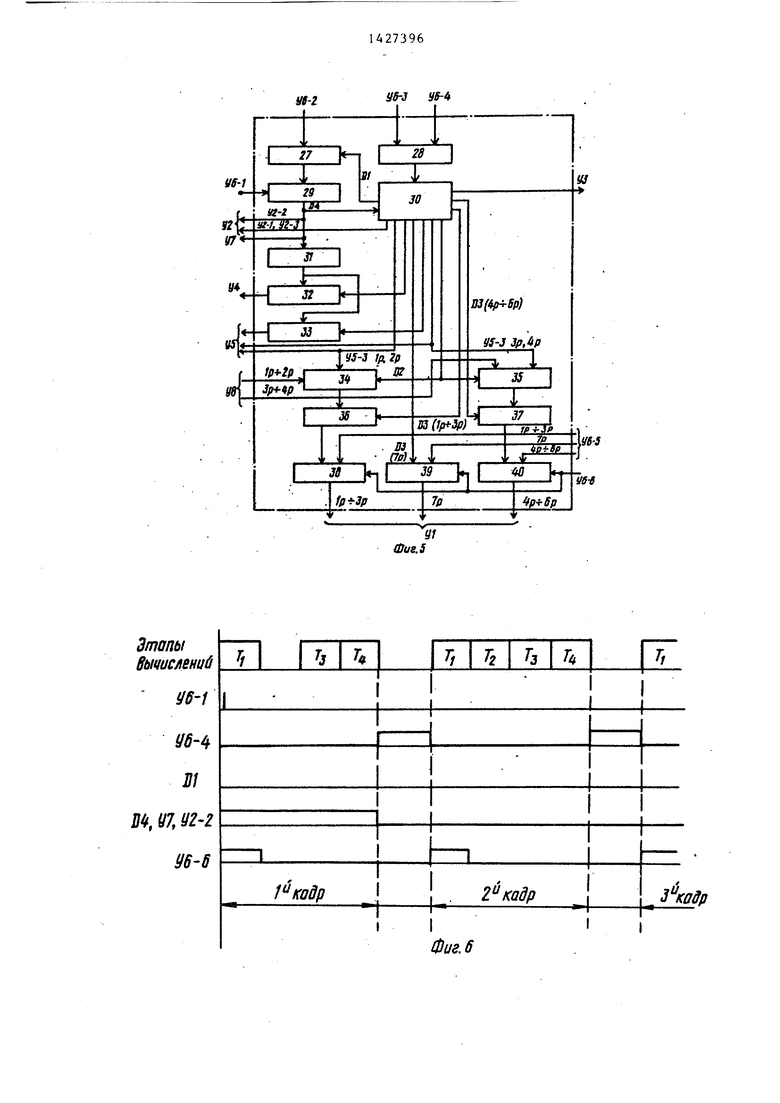
Блок 2 временного сглаживания (фиг.4) содержит блоки 19,20 постоянной памяти, умножители 21, 22, сумматор 23, регистр 24, коммутатор 25 и блок 26 оперативной памяти. Блок 4 управления (фиг.5) содержит схему ИЛИ 27, счетчик 28, триггер 29, блок 30 постоянной памяти, инвертор 31, вентили 32, 33, коммутаторы 34, 3.5, сумматоры 36, 37, коммутаторы 38-40.
На фиг.6-11 приведены временные диаграммы управляющих сигналов, поясняющие работу устройства.
При составлении временных диаграмм считалось, что текущее изображение имеет размерность 8x8 точек, а эталонное изображение -4x4 точек.
Предлагаемое устройство работает следующим образом.
На вход блока 1 памяти текущего изображения поступает сигнал текущего телевизионного изображения. Период обработки этого сигнала устройством можно разделить на несколько этапов (фиг.6).
1. Запись текущего телевизионного изображения в блок 1 памяти текущег изображения 1.
0
Q
с
0
5
2.Определение координат объекта на текущем телевизионном изображении в корреляторе 6 и блоке 7 определения координат.
3.Межкадровое сглаживание изоб- ражения объекта в блоке 2 временного сглаживания.
4.Обновление эталонного изображения в блоке 5 памяти эталонного изображения.
Рассмотрим работу устройства на каждом из этих этапов.
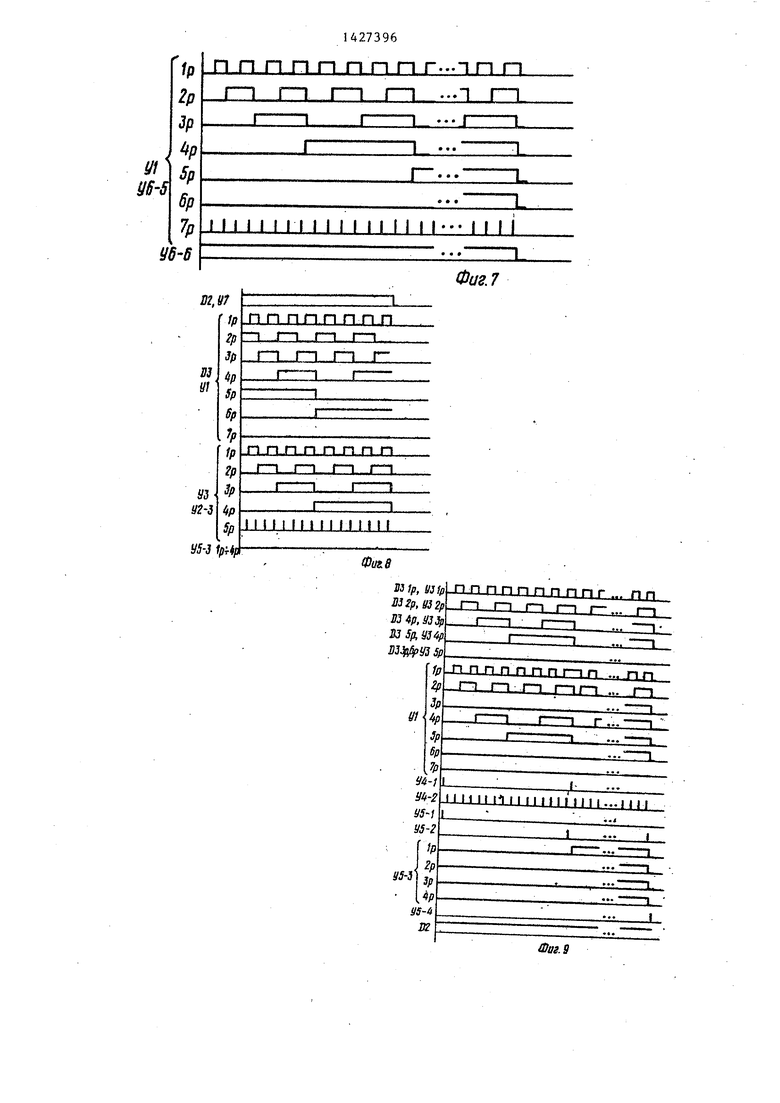
На вход блока 1 памяти поступает сигнал текущего телевизионного изображения. Одновременно на вход блока управления поступает внешний управляющий сигнал У6-5, необходимый для.. синхронизации процесса записи в блок 1 (фиг.З).Первые шесть разрядов этого сигнала являются сигналами адреса, а седьмой разряд - сигналом записи. Внешний управляющий сигнал У6-6, поступающий одновременно с сигналом Уб-3, обеспечивает прохождение сигнала У6-3 через коммутаторы 38-40 блока 4 управления на управляющий вход блока 1 памяти. Работа : стройства на этом этапе поясняется диаграммой управляющих сигналов, приведенной на фиг.7.
На втором этапе на входы коррелятора 6 поступают значения текущего и эталонного изображения из блоков 1 и 5 соответственно. В блоке 6 реализуется разностный корреляционно-экстремальный алгоритм. На вход вычитателя 8 поступают значения элементов текущего и эталонного изображений. Вычитатель 8 вычисляет разность, значение которой поступает на вход блока 9 памяти, с помощью которого вычисляется модуль этой разности. На сумматоре 10 и регистре 11 рр- ганизован накапливающий сумматор, который перед началом вычисления обнуляется сигналом У4-1 (фиг.9). Сигнал У4-2 является сигналом записи в регистр 11. Вычисленное значение поступает в блок 7 определения координат, где определяется минимальная величина среди всех значений. Текущее значение поступает на вход вычитателя 15. На его второй вход поступает текущее значение минимума, хранящееся в регистре 12. Если содержимое регистр 12 оказывается больше нового значения, то знак их разности, вычисленной на вычитателе 15, будет равен
l, которая поступает на вентиль 17 и разрешает прохождение сигнала У5-2 на входы записи регистров 12 и 13. В результате в регистр 12 запишется новое значение текущего минимума, а в регистре 13 - значения, соответствующие этому минимуму и поступающие в блок 7 из блока 4 управления (сигнал У5-3). По окончании вычислений в регистре 13 хранятся значения, соответствующие положению объекта на изображении. Эти значения поступают в блок 4 управления, где используются при выборе участка текущего изображения объекта, поступающего на сглаживание в блок 2. Для вьщачи на выход устройства вычисленные значения координат объекта преобразуются в другую систему координат, в которой координаты (. объекта равны О, если объект находится в центре текущего кадра. Для этого значения поступают на вычитатель 16, на второй вход которого поступают координаты центра текущего изображения, записанные в блоке 18 постоянной памяти. Вычисленные значения записываются в регистр 1 сигналом У5-4 и поступают на,выход устройства.,
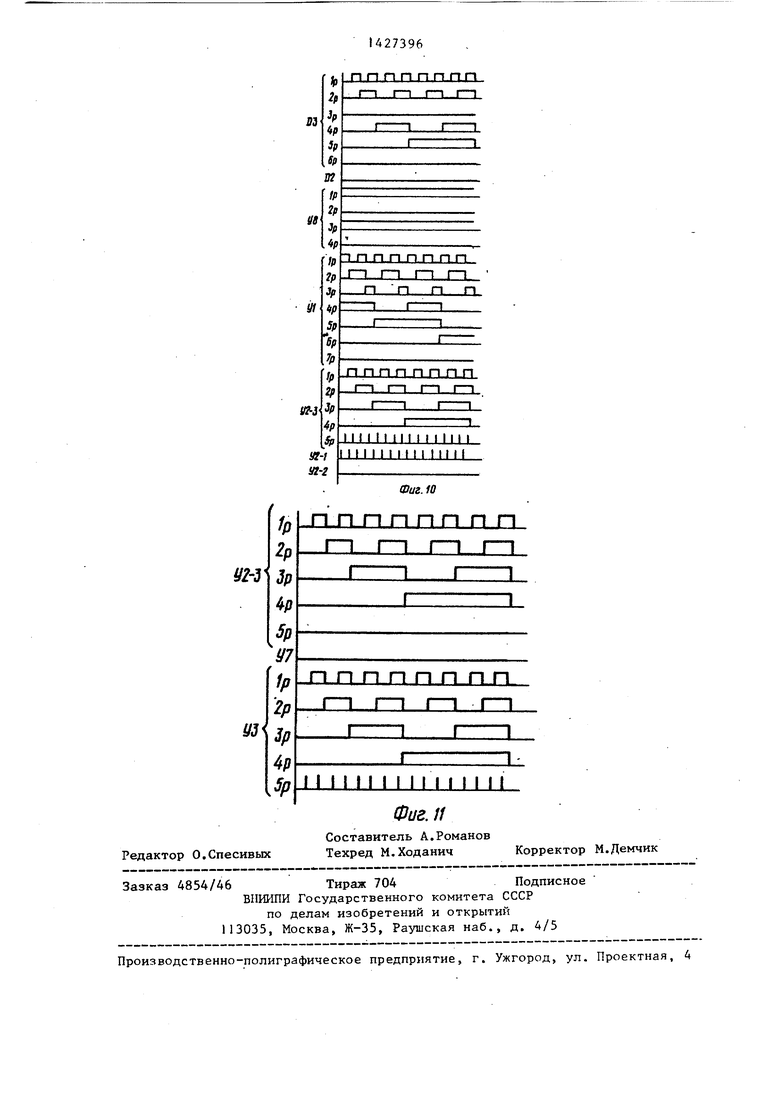
На третьем этапе в блоке 2 производится сглаживание изображения объекта. Сглаженное изображение объекта представляет собой сумму большого числа изображений объекта, взятых с монотонно убываюш м весом. Так как каждое изображение объекта взято из соответствующего кадра относительно найденных в нем координат объек та, то суммирование изображений объекта приведет к уменьшению дисперсии аддитивной некоррелированной помехи. Другим положительным следствием данного межкадрового сглаживания является сглаживание ошибок дискретизации и квантования, также искажающих изображение объекта. На вход блока 2 поступают значения элементов участка текущего кадра, взятого относительно найденных координат объекта. Выбор соответствзпоще- го участка текущего кадра обеспечивается с помощью блока 4 управления. Значения координат объекта в текущем кадре (сигнал У8) поступают из блока 7 определения координат в блок 4 управления. Значения сигнала У8 проходят через коммутаторы 34, 35, на сумматоры 36, 37, на вторые входы ко
10
1520 25 30
35
40
45
50
5
торых поступает сигнал ДЗ из блока 30 , постоянной памяти. На выходах сумматоров образуются сигналы адреса блока памяти теку1цего изображения,которые через коммутаторы 38-40 поступают в блок 1 (фиг.10). На умножителе 22 производится умножение значения элемента текущего изображения на соответствующий коэффициент, поступающий из блока 20 постоянной памяти. На сумматоре 23 вычисляется итоговое значение, которое записывается в регистр 24 сигналом У2-1 (фиг.10). Вычисленное значение через коммутатор 25 поступает на вход блока 26 оперативной памяти и записывается там. При этом первые 4 разряда сигнала У2-3 являются сигналами адреса,, а пятьй разряд - сигналом записи- считывания .
В предлагаемом устройстве производится смена эталонного изображения в каждом телевизионном кадре, и в качестве нового эталона выбирается текущее значение сглаженного изображения. Для этого производится последовательное считьшание элементов сглаженного изображения из блока 2 временного сглаживания и запись н:с в блок памяти эталонного изображения (фиг,11). Первые четыре разряда сигналов У2-3 и УЗ являются cигн;iлa- ми адреса, а пятые разряды - сигналами записи-считьшания. Характерной особенностью алгоритма межкадрового сглаживания является то, что изображения объекта, взятые из различных кадров, входят в сглаженньш сигнал с разными весами, причем с наибольшими весами в сглаженный сигнал входят изображения последних кадров.
Работа устройства на всех этапах вычислений синхронизируется блоком 4 управления, а также внешними синхронизирующими сигналами. На счетчик 28 блока 4 управления поступает тактовая последовательность прямоугольных импульсов Уб-3. Сигнал У6-4 является внеганим сигналом запуска устройства. Если сигнал Уб-4 равен 1, то счетчик 28 удерживается в нулевом состоянии и устройство не работает,Если сигнал Уб-4 равен О, то устройство начинает свою работу. Счетчик 28 под .воздействием тактовых импульсов вырабатьтает адрес блока 30 постоянной памяти, в котором записаны все управляющие сигналы. Число разрядов
в блоке 30 постоянной памяти равно числу управляющих сигналов устройст- ва, а число ячеек памяти в каждом разряде определяется периодом работы всего устройства, поделенным на длительность одного такта вычислений,
В первом цикле вычислений выполняются только 1, 3 и 4 этапы. Во время первого кадра производится началь- ная запись эталонного изображения в блок 5 и начальная установка сгла- женного изображения в блоке 2. Для обеспечения этого режима работы устройства на его вход поступает сиг- нал У6-1 (фиг.6), устанавливающий триггер 29 в единичное состояние. Перед началом работы триггер 29 должен быть обнулен путем подачи сигнала . После, прихода сигнала Уб-1 триг гер 29 находится в единичном состоянии до тех пор, пока в конце первого кадра из блока 30 постоянной памяти не поступит сигнал Д1, переводящий триггер 29 в нулевое состояние. В этом состоянии триггер 29 находится во время всех последующих вычислений. Наличие триггера 29 позволяет сформировать управляющие сигналы У2-2 У7, необходимые только в первом кад- ре, а также блокировать прохождение сигналов У4, У5 на блоки 6, 7 устройства, которые во время первого кадра не работают. Сигнал Д4 с выхода триггера 29 в качестве адресного сигнала поступает также в блок 30 постоянной памяти, обеспечивая формирование в первом кадре соответствующих управляющих сигналов У5-3 и ДЗ, используемых на этапах 3 и 4. В последующих кадрах сигнал Д4 равен О, и .сигналы У5-3 и ДЗ примут другие значения, чем в первом кадре, так как считываются из другой области блока 30 постоянной памяти.
В .качестве исходного эталонного изображения может быть выбрано как специально сформированное изображение объекта, так и текущее телев изионное изображение объекта. Оно поступает на вход устройства и записывается в блоке 1 памяти текущего изображения. Так как эталонное изображение имеет меньшие размеры, чем текущее телевизионное изображение, то при начальной записи эталона искомое изображение объекта записывается в центральную часть матрицы блока 1 памяти текущего изображения. В дальнейшем из блока 1
0 5 0 5 Q
5
0
5
0
считывается центральная часть записанного там изображения, содержащая искомый объект. На 3 этапе оно запоминается в блоке 26 оперативной памяти блока 2 временного сглаживания в качестве исходного сглаженного изображения. Это обеспечивается подачей сигнала У2-2 на коммутатор 25 и сигнала У2-3 на блок 26 оперативной памяти (фиг.8). На этапе 4 производится запись исходного эталонного изображения. Для этого считывается центральная часть изображения из блока 1, которая запоминается в блоке 5 памяти эталонного изображения (фиг.8), Начиная с второго кадра устройство функционирует в обычном режиме, выполняя все этапы вычислений (фиг.6).
Предлагаемое устройство позволяет повысить точность определения координат объекта, так как в качестве эталонного изобргшения при его смене используется не текущее изображение объекта, а сглаженное изображение, на котором сигнал от объекта отфильтрован от искажающих его аддитивных шумов,
Фор; -(ула изобр е тения
Устройство для определения положения объекта на изображении, содержа- щее первый блок памяти, информационный вход которого является информационным входом устройства, управляющий вход блока памяти подключен к первому выходу блока управления, а выход С9,е- динен с,одним информационным входом коммутатора, другой информационный вход которого подключен к выходу блока временного сглаживания, управляю- пщй вход которого соединен с вторым выходом блока управления, второй блок памяти, информационный вход которого подключен к выходу коммутатора, управляющий вход соединен с третьим выходом блока управления, а выход подключен к первому информационному входу коррелятора, выход которого соединен с информационным входом блока определения координат, один выход которого подключен к информационному входу блока управления, отличающееся тем, , с целью повышения точности и упрощения устройства, выход первого блока памяти соединен с другим информационным входом коррелятора, управляющий вход которого подключен к четвертому выходу блока управления и к информационному входу блока временного сглаживания, пятый выход блока управления соединен с управляющим входом коммутатора, а шестой выход блока управления под968
ключен к управляющему входу блока определения координат, выход которого является информационньм вЫхрдом устройства, при этом вход запуска блока управления является синхронизирующим входом устройства.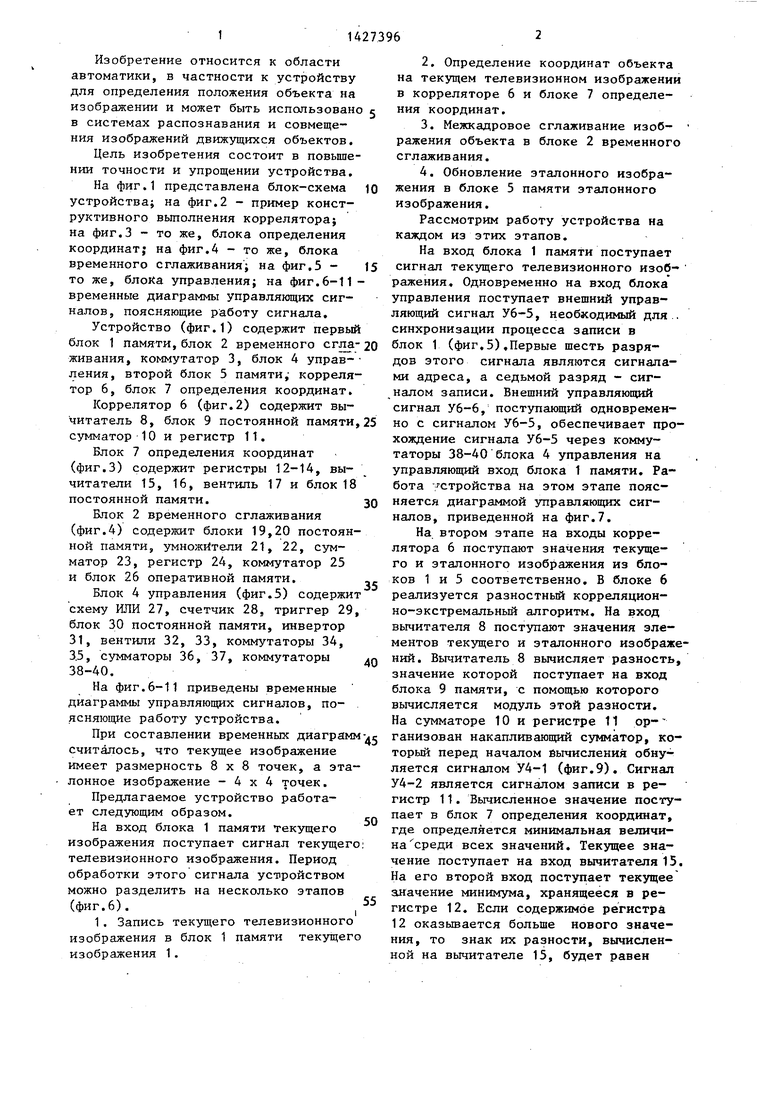
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения положения объекта на изображении | 1988 |
|
SU1569853A2 |
| Устройство обнаружения и определения координат объекта на изображении | 1990 |
|
SU1737755A1 |
| Устройство определения координат объекта | 1988 |
|
SU1562980A1 |
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ И ЛОКАЛИЗАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ ЗОНЫ С ОТНОСИТЕЛЬНЫМ ПЕРЕМЕЩЕНИЕМ В СЦЕНЕ И ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯ | 1997 |
|
RU2216780C2 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| Устройство для определения рассогласования в телевизионной следящей системе | 1983 |
|
SU1104692A1 |
| Устройство для распознавания и определения координат объекта манипулирования в рабочей зоне робота | 1985 |
|
SU1370639A1 |
Фиг.1
Фиг.2
ФигЛ
yt-г
У6-3 yf-4
Ji rLTLj-i
1427396 П П n n П П nn
n П n n
n n n j-i
.
I 1 I I I tl I I I I I и
I I I I I I IN I I in I
2-3
УЗ
IP 2p
3p
p
Sp У7
IP
3p
4p Sp
Составитель А.Романов Редактор О.Спесивых Техред М.Ходанич
.в-i-eie ----
з11каз 854/46Тираж 704Подписное
БНШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
.. -...-.--.--i--- - - -
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
П П n n П П nn
n П n n
n n n n j-i
.
I I 1 I I I tl I I I I I и
I I I I I I IN I I in I
Фиг. 11
| Устройство для нормализацийизОбРАжЕНий | 1979 |
|
SU853634A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для определения рассогласования в телевизионной следящей системе | 1983 |
|
SU1104692A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
