будет накопления ошибки оценки координат объекта. Пля случая медленного перемещения объекта в устр-ве используется алгоритм обновления эталона, основанный на сравнении разностной Л-ции с порогом, который также не вызывает быстрого накопления ошибок в
оценке координат объекта. В устр-ве производится анализ перемещения объекта за период в L кадров, и в зависимости от его вепичины выбирается тот или иной алгоритм обновления эталона. Тто позволяет повыси ь точность определения координат объекта. 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство обнаружения и определения координат объекта на изображении | 1990 |
|
SU1737755A1 |
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| Устройство для определения положения объекта на изображении | 1988 |
|
SU1569853A2 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Устройство для определения положения объекта на изображении | 1987 |
|
SU1427396A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 1992 |
|
RU2054196C1 |
| СИСТЕМА ВИЗИРОВАНИЯ ОБЪЕКТА | 2006 |
|
RU2315255C1 |
| Процессор | 1985 |
|
SU1280378A1 |
| Устройство для распознавания контуров изображений | 1983 |
|
SU1156103A1 |
Изобретение относится к технике цифровой обработки изображений (И) и может использоваться в системах технического зрения. Цель изобретения - повышение точности определения координат объекта. Устройство определения координат объекта содержит блок памяти (БП) 1 сигнала сглаженного И, БП 2 сигнала эталонного И, БП 3 и 4 сигнала текущего И, блок 5 адресации, БП 6 весовой ф-ции, БП 7 пороговых ф-ций, блоки 8, 9 и 11 коммутации сигналов, блок 10 вычисления разности сигналов текущего и эталонного И, умножитель 12, блок 13 управления, блок 14 вычисления сигналов координат объекта и блок 15 координатных регистров. Данное устройство позволяет повысить точность определения координат объекта, т.к. в качестве эталонного И при его смене используется не текущее И объекта, а сглаженное И, на котором сигнал от объекта отфильтрован от искажающих его аддитивных шумов. Использование весовой ф-ции эталонного И позволяет повысить точность определения координат объекта на сложном фоне, т.к. при вычислении разностной корреляционной ф-ции не будут использоваться эл-ты эталонного И, не относящиеся к искомому объекту. В устр-ве в качестве эталона выбирается сглаженное И объекта, в формировании которого участвует большое число кадров. В этом случае значения ошибок дискретизации И объекта в текущем и сглаженном И можно считать независимыми, если за период сглаживания объект перемещается на расстояние в несколько дискрет. Поэтому при таком периодическом обновлении эталона не будет накопления ошибки оценки координат объекта. Для случая медленного перемещения объекта в устройстве используется алгоритм обновления эталона, основанный на сравнении разностной ф-ции с порогом, который также не вызывает быстрого накопления ошибок в оценке координат объекта. В устройстве производится анализ перемещения объекта за период в L кадров, и в зависимости от его величины выбирается тот или иной алгоритм обновления эталона. Это позволяет повысить точность определения координат объекта. 6 ил.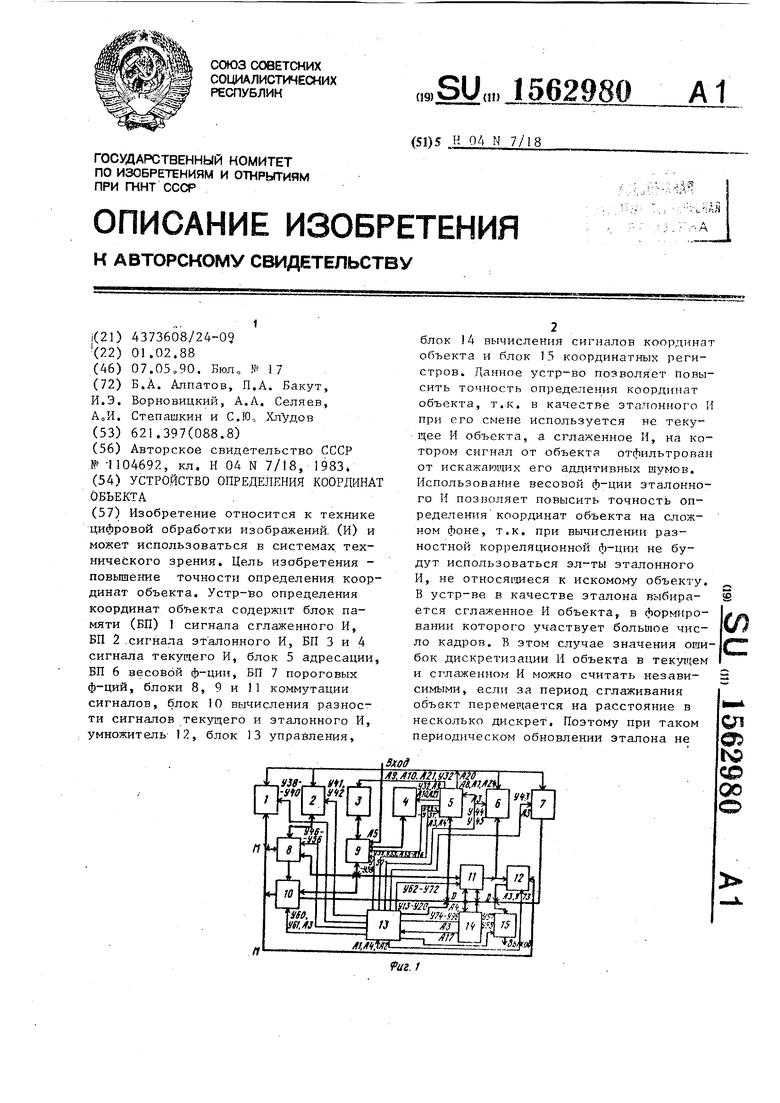
Изобретение относится к цифровой обработке изображений и может быть использовано в системах технического зрения.
Цель изобретения - повышение точности определения координат объекта.
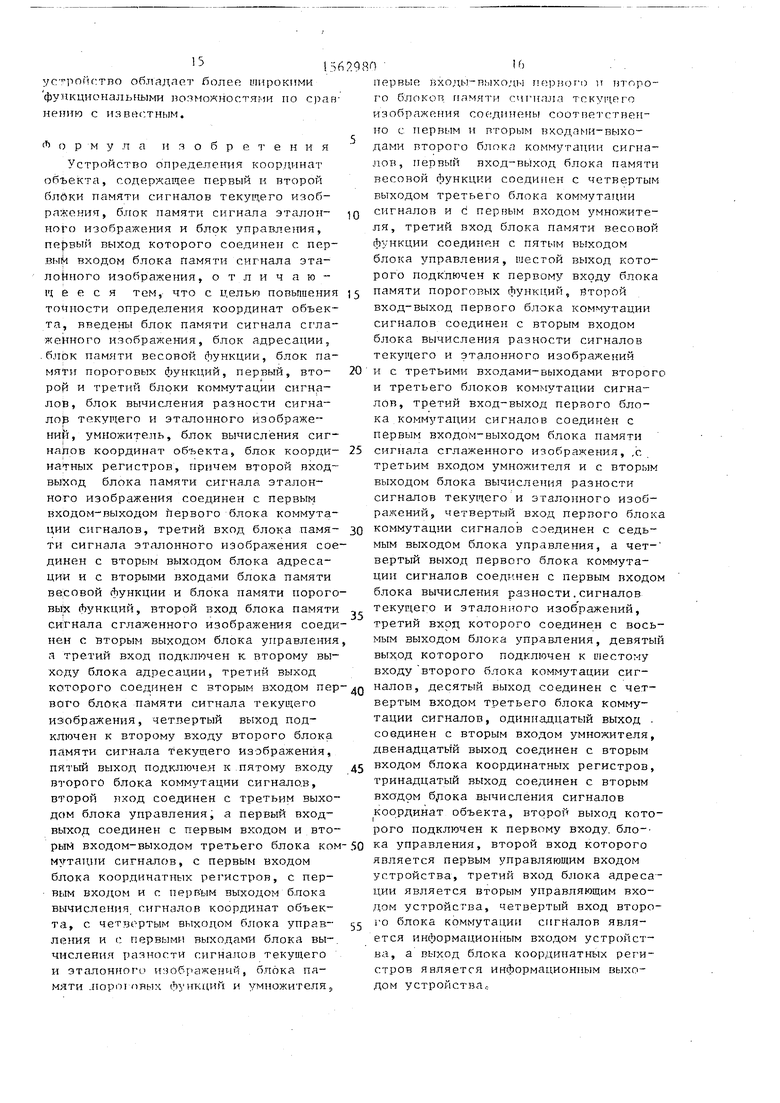
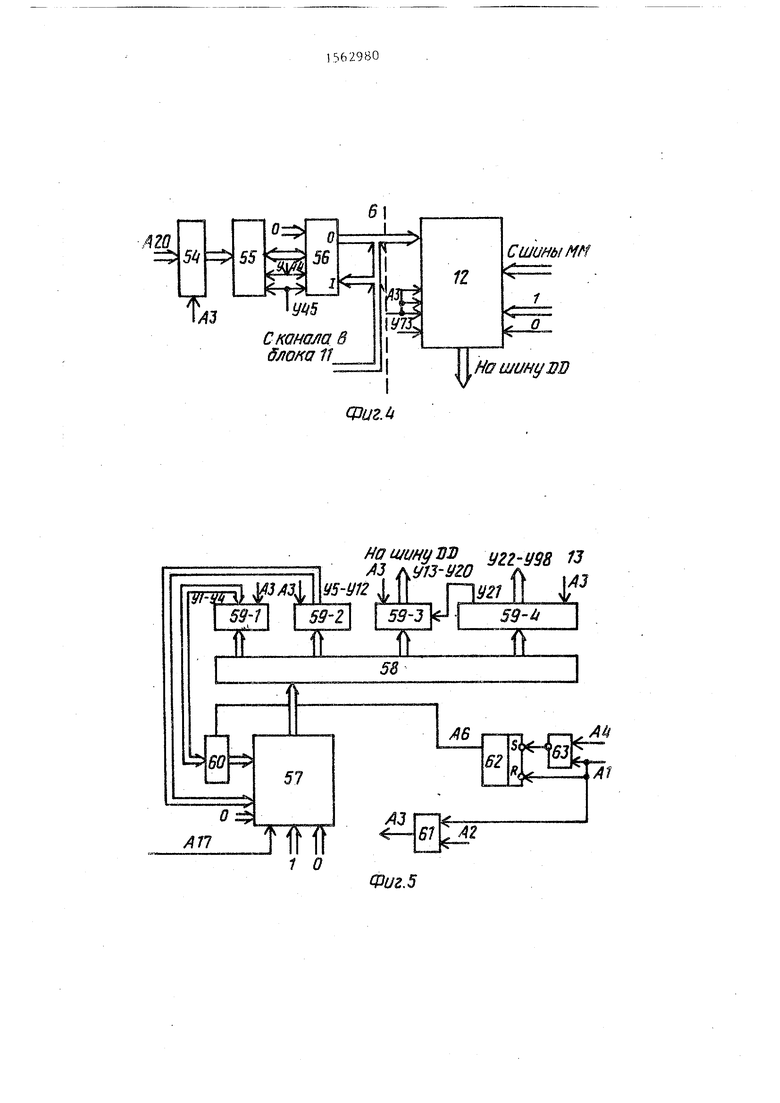
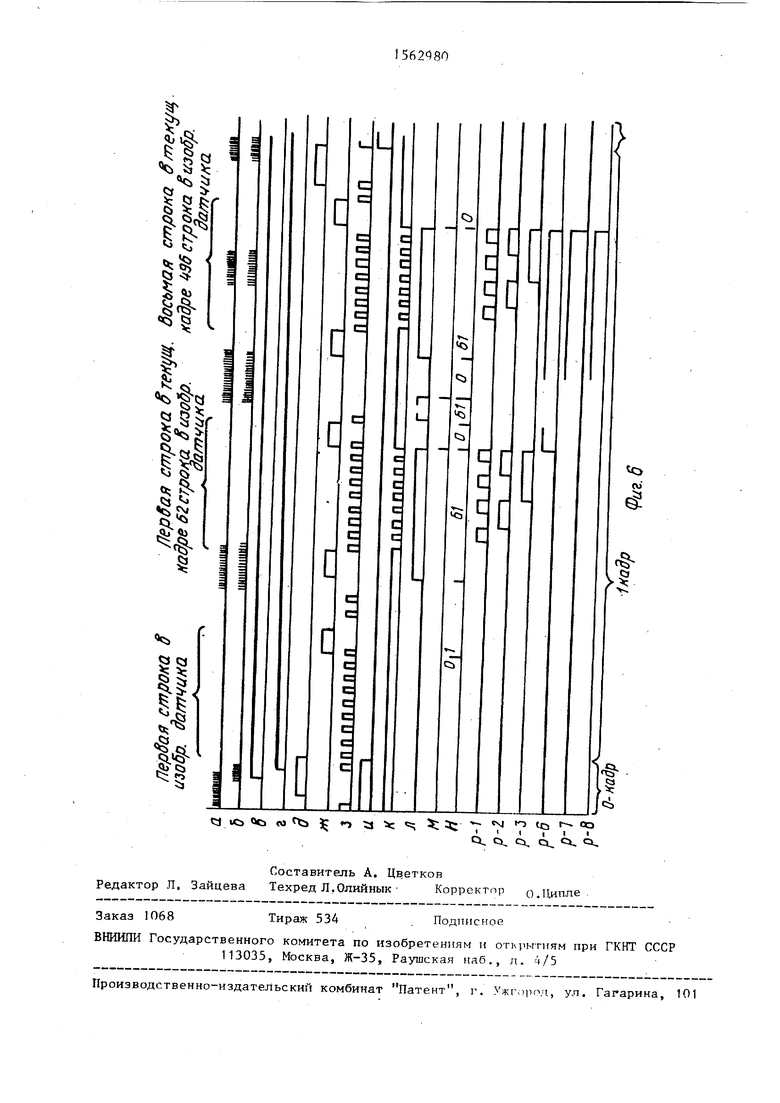
На Лиг. 1 представлена структурная схема устройства определения координат объекта; на фиг. 2 - блок адресации; на фиг 3 - блок вычисления разности сигналов текущего и эталонного изображений, блок памяти пороговых функций, блок вычисления сигналов координат объекта, блок координатных регистров; на фиг. 4 - блок памяти весовой функции и умножителя; на фиг. 5 - блок управления; на фиг«6 - временные диаграммы сигналов, поясняющие работу устройства.
Устройство для определения координат объекта (фиг.1) содержит блок 1 памяти сигнала сглаженного изображения, блок 2 памяти сигнала эталонного изображения, первый блок 3 памяти сигнала текущего изображения, второй блок 4 памяти сигнала текущего изображения, блок 5 адресации, блок б памяти весовой функции, блок 7 памяти пороговых Функций, первый блок 8 коммутации сигналов, второй блок 9 коммутации сигналов, блок 10 вычисления разности сигналов текущего и эталонного изображений, третий блок 11 коммутации сигналов, умножитель 12, блок 13 управления, блок 14 вычисления сигналов координат объекта и блок 15 координатных регистров.
Блок 5 адресации (фиг.2) содержит первый 16 и второй 1,7 формирователи адресов (ФА1 и А), блок 18 постоянной памяти (БПП) блока адресации, мультиплесор 19 блока адресации, блок 20 оперативной памяти (НОП) блока адресации, формирователь 21 на три состояния бпока адресации, первый 22 и второй 23 сумматоры, регистр 24, шинный Формирователь (UI) 25, первый
5
0
5
0
5
0
5
0
5
26 и второй 27 четырехканальные приемопередатчики (ПП1 и ПП2), триггер 28 блока адресации, первый 29, второй 30, третий 31, четвертый 32 элементы НЕ блока адресации, первый 33, второй 34, третий 35 счетчики блока адресации, первый 36, второй 37 элементы ИЛИ блока адресации, компаратор 38 цифровых кодов.
Блок 10 вычисления разности сигналов текущего и эталонного изображений (Аиг.З) содержцт БПП 39 блока вычисления разности сигналов, первый 40, второй 41 и третий 42 регистры блока вычисления разности сигналов, формирователь 43 на три состояния блока t
вычисления разности сигналов. Блок 7 памяти пороговых фунщий (фиг.З) содержит БПП 44 блока памяти пороговых Аункций, регистр 45 блока памяти пороговых функций. Блок 14 вычисления сигналов координат объекта (фиг.З) содержит микропроцессор 46, первый 47, второй 48 и третий 49 элементы НЕ блока вычисления сигналов координат объекта, мультиплексор 50 блока вычисления сигналов координгт объекта и регистр 51 блока вычисления сигналов координат объекта. Бгок 15 координатных регистров (фиг.З) содержит первый 52 и второй 53 регистры блока координатных регистров.
Блок 6 памяти весовой функции (фиг„4) содержит регистр 54 блока памяти весовой функции, БОП 55 блока памяти весовой Лункции и ШФ 56 блока памяти весовой функции. Блок 13 управления (фиг„5) содержит формирователь 57 адресов микрокоманд (АМ), блок 58 репрограммируемой памяти (БРП), регистр 59 микрокоманды, первый 60 и второй 61 элементы И бпока управления, триггер 62 блока управления и элемент И-НЕ 63D
Устройство определения координат объекта работает следующим .
Сигнал А (фиг.бв) открывает элемент И 61, на вход которого поступает внешний сигнал тактовой частоты А2 типа меандр (фиг.ба), задающий частоту работы синхронизируемых элементов устройства. На выходе элемента И 61 формируется сигнал A3 (фиг.бб). Одновременно единичный уровень сигнала А1 поступает на вход R-тригге- ра 62 и первый вход элемента И-НЕ 63, на второй вход которого подается внешний кадровый синхроимпульс А4 (Фиг.бд) Единичный уровень очередного кадрового синхроимпульса устанавливает триг- гер 62 в единичное состояние, В результате этого на выходе триггера 62 формируется сигнал А6 (Фиг06г), который открывает элемент И 60 и разрешает прохождение управляющих сигналов У1-У4 на первый управляющей вход формирователя 57 адреса микрокоманд, С этого момента устройство для определения координат объекта на изображении начинает работать в соответствии с микропрограммой, хранящейся в блоке 58 репрограммируемой памяти. Его работа организована таким образом, что в течение времени одного кадра производится запись текущего кадра в один из блоков памяти сигнала текущего изображения и одновременно с этим вычисляются координаты объекта в предыдущем кадре, записанном в другом блоке памяти сигнала текущего изображенияо
Для синхронизации записи текущего кадра используются внешние синхронизирующие сигналы: сигнал тактовой частоты А7 типа меандр (фиг06з), задающий частоту дискретизации отсчетов входного цифрового видеосигнала А5, кадровый синхроимпульс А4 (фиг. 6д), строчный синхроимпульс А8 (фиг.бж)
видеосигнала А5 и шестиразрядный сиг- 45 инвертирования сигнала А15, управ- нал А24. ляют приемопередатчиком 27 и блоком 9.
Эти сигналы управляют счетчиками 33 и 35, Формирующими десятиразрядный адресный сигнал А9 (фиг.бр), злемен50
том ИЛИ 36, который формирует нулевой сигнал записи A10--A7VA4VA8VA1 2 (фиг.бк), счетчиком 34 и цифровым компаратором 38. Счетчик 34, на счетный вход которого поступает строчный синхроимпульс А8, а на вход обнуления - сигнал А22 (фиг.6м), и цифровой компаратор 38, сравнивающий цифровые значения сигнала А25 (фиг.бн), снимаемого с выхода счетчика 34, и сиг55
При нулевом уровне сигнала А15 канал В приемопередатчика 27 коммутируется с каналом А, а канал X с каналом С, канал В блока 9 коммутируется с каналом X, а канал С - с каналом А. При единичном уровне сигнала AI5 все выполняется наоборот.
Канал А блока 9 является информационным входом устройства для определения координат на изображении.
На фиг.6 показаны временные диаграммы сигналов, поясняющие момент начала рабогм устройства и процесс
0
0
5
нача А24, преде гавлякнчего коэффициент прореживания строк п, формируют сигнал АН (Фиг,6л), который появляется на выходе компаратора 38 в момент равенства цифровых значений сигналов А25 и А24. Сигнал разрешает запись каждой строки изображения датчика видеосигнала, кратной п, в блок 3 или 4. Сигнал А22 появляется на втором выходе цифрового компаратора 38 в случае, когда цифровое значение сигнала А25 больше значения сигнала А240
Счетчик 33, на счетный вход которого поступает сигнал А10, а на вход установки в нуль - сигнал A23 A12V A8, формирует адреса отсчетов сигнала А5 в строке текущего кадра (пять младших разрядов сигнала А9 (A9-I-A9-5), а счетчик 35, управляемый по входам установки в нуль и счетному входу сигналами А4 и А12, Формирует адрес строки текущего кадра (пять старших 5 разрядов сигнала А9 (А9-6-АЧ-10)),
Передачу сигналов А9, А10 на управляющие входы блока 3 или 4 памяти сигнала текущего изображения, выбранного для записи очередного телевизионного кадра, осуществляет четырехка- нальный приемопередатчик 27 путем коммутации канала В с каналом А или С. Подключение входа выбранного блока памяти текущего изображения к информационному входу устройства осуществляется с помощью блока 9. Очередностью записи в блоки 3 и 4 последовательно поступающих кадров телевизионного изображения управляют сигналы А15 (Фиг.би) и Сигнал AJ5 формирует триггер 28, на счетный вход которого поступает инвертированный кадровый синхроимпульс А4. Сигнал А15 и сигнал А16, который образуется путем
0
5
0
0
5
При нулевом уровне сигнала А15 канал В приемопередатчика 27 коммутируется с каналом А, а канал X с каналом С, канал В блока 9 коммутируется с каналом X, а канал С - с каналом А. При единичном уровне сигнала AI5 все выполняется наоборот.
Канал А блока 9 является информационным входом устройства для определения координат на изображении.
На фиг.6 показаны временные диаграммы сигналов, поясняющие момент начала рабогм устройства и процесс
записи видеосигнала-текущего кадра, например, в блок 3. Диаграммы сигналов носят качественный характер, при этом считалось, что , а размерность текущего кадра элементов. Диаграммы разрядов А9-4, А9-5, А9-9, А9-10 сигнала А9 на не показаны, поскольку они имеют нулевое значение.
В самом первом с начала работы кадре производится только запись теле™ визионного изображения в блок памяти сигнала текущего изображения, например блок 3. Формирование исходного эталонного изображения объекта, за- пьсь его в блок памяти сглаженного изображения происходят во время записи второго кадра в блок 4. В качестве эталонного изображения выбирается центральный участок первого кадра, хранящегося в блоке 3, Вычисление координат объекта в первом кадре не производится. Начиная с третьего кадра устройство для определения коорди- нат объекта на иаображении кроме записи очередного кадра в блок 3 обрабатывает записанный в блоке 4 предыдущий (второй) кадр. Период обработки второго и всех следующих кадров можно разбить на несколько этапов.
Первый этап. Вычисление разностной корреляционной функции и определение координат ее минимума
Второй этап. Сглаживание изображения объекта.
Третий этап. Обновление эталонного изображения объекта,,
Четвертый этап. Вычисление весовой функции эталонного изображения.
На первом этапе вычислений в устройстве определяются координаты объекта на изображении, записанном в одном из блоков памяти текущего изображения. Для этого производится вычисле- ние разностной корреляционной Функции
МИ М-1
Ffo.K)«Z T {Uti-H,j+p:i-htt,,
ls.0
(О
яН-Н1,j + мЗ - элементы текущего
изображения объекта G размерностью точек;
,}J - элементы эталонного изображения объекта Н размерностью М#М точек;
элементы весовой
функции Z размернос- тью точек;
0
cп 25 -JQ
,Q
.
,
t
35
50
V,(,N-M+1.
Значения ) V, л л, минимизирующее выражение (1), принимаются за координаты объекта на текущем изображении, так как в эталонном изображении Н присутствуют как изображение объекта, так и участки Фона, то сравнение этого эталонного изображения с участками текущего изображения может привести к ошибкам в определении координат объекта. Введение Функции Z, взвешивающей значения межэлементных разностей эталона Н и текущего кадра G, позволяет Ослабить влияние участков фона, присутствующих в эта- лонном изображении Н, на точность определения координат объекта. В идеальном случае элементы весовой функции Z, соответствующие элементам объекта в эталоне Н, должны иметь значение 1, а элементы весовой функции, соответствующие участкам фона в эталоне И, должны иметь значение О, Тогда участки фона, присутствующие в эталонном изображении Н, не окажут никакого влияния на точность вычисления координат объекта по алгоритму (1).
Для сокращения числа вычислительных операций в устройстве для определения координат объекта используется метод последовательных испытаний, согласно которому вычисление разностной функции (1) для какого-то участка текущего кадра с координатами -J, и производится до тех пор, пока текущее значение разностной функции остается меньше некоторой пороговой функции R(k), зависящей от числа k элементарных разностей, вычисленных к этому моменту. При этом вычисление функции (1) целесообразно начинать с центральных элементов эталонного изображения Н, заведомо принадлежащих объекту. Если после вычисления k элементарных разностей значение суммарной разностной Лункции превысило пороговую величину R(k), то вычисление функции (1) для данного участка текущего кадра с координатами ), р прекращается. Запоминается число испытаний k и величина функции (1), вычисленной по этому моменту. После этого производится вычисление функции (1) для других значений и ц . В ка
честве координат объекта принимаются такие значении , л (U, лпя которых число испытаний k было наибопычпм Если для нескольких пар значений V и а число испытаний k было одинаковым то за координаты объекта принимаются те из этих значений {I, f/, при которых вычисленная величина разностной функции F(-0,p,k) была минимальной. Пороге вые функции R(k) для различных значений k вычисляются заранее и записываются в блок памяти пороговых функций, представляющий собой блок постоянной памяти. Три этом значение дисперсии аддитивных помех,присутствующих на изображении, считается постоянным и изрестным,
На втором этапе вычислений производится сглаживание изображения объек та в соответствии с алгоритмом межкадровой фильтрации
Ci,J( -p),,j + ,bJ
(2)
где V fi,j - значение сглаженного изображения объекта в n-м кадре;
1 - параметр экспоненциального сглаживания, выби- раемый в диапазоне .
Сглаженное изображение объекта представляет собой сумму большого числа изображений объекта, взятых с монотонно убывающим зесом0 Так как каждое изображение объект, взято из соответствующего (n-l)-ro кадра относительно найденных в нем координат объекта д) , р . , то суммирование изображений объекта в соответствии с выражением (2) приведет к уменьше- . нию дисперсии аддитивной некоррелированной помехи в (1+р)/(1-/з) раз, a также к сглаживанию ошибок дискрети- зации и квантования в различных кадрах. Другое положительное следствие данного алгоритма сглаживания сигналов от объектов, выделенных из последовательности кадров, заключается в том, что вследствие движения объекта уменьшается контрастность посторонних неподвижных объектов, попадающих в область эталона.
На третьем этапе вычислений произ- водится обновпение эталонного изображения объекта. В устройстве для определения координат на изображении реализован алгоритм периодического
Q 5
0
5
0
Q
5
обномпентг п июн.4, 44llf rtv ipfi.i,- и четне.ртын этапы пычисиений JWIO IM- югся -пнчь чрреч каждые I, кадрон. чина периода обновления этачоп I, выбирается такой, чтобы за L кадров не могло произойти существенных изменений изображения объекта. R угт1 ройстве для определения координат объекта используется следующий алгоритм обновления эталонного изображения объекта. Если в течение последних L кадров объект переместился на расстояние, превыпающее величину интервала дискретизации изображения, то производится обновление эталонного изображения, в качество которого выбирается изображение объекта, тпа- женное по алгоритму (2). Если за L кадров перемещение объекта не превысило величины одного дискрета, то производится сравнение значения разностной Аункции (1) вычисленной н точке координат объекта V, р, с пороговой вегтичиной, хранящейся в бпоке пороговых Аункций, Если вычисленное значение F(v, р) превышает пороговую величину, то считается, что изображение объекта изменилось и в качестве нового эталонного изображения выбирается сглаженное изображение объекта. Если F(V p) не превысило пороговой величины, то -эта- понное изображение объекта не меняется. Необходимо заметить, что коэффициент з л алгоритме сглаживания (2) должен выбираться таким, чтобы выполнялось соотношение
L«2
J±2 1-ft
На четвертом этапе вычислений на сглаженном изображении производится выделение множества Q точек, принадлежащих объекту. Поскольку длительность переходного процесса на выходе экспоненциального сглаживающего Анпьтра с коэАфициентом экспоненциального сглаживания ft равна L
-Р выполняется начиная с (L-H)-го кадра
Весовая Аункция ,jJ, используемая для вычиспения Аункции (1) в первых L кадрачм берется равной единице для всех значений (i,j).
Межкадровое сглаживание изображения объекта по алгоритму (2) позволяет пог.чсигь отношение сигнал/шум как
9
кадрам, то четвертый этап
по отношению к аддитивным помехам, так и по отношению к посторонним объектам, попадающим в область эталона. Это позволяет путем пороговой обработки выделить множество Q точек, принадлежащих объекту Множество Q точек используется для формирования йовой весовой функции Z эталонного
15
20
30
Изображения, элементы которой принима- кода условия, выход которого соединен |от значение 1, если соответствующий элемент сглаженного изображения Принадлежит множеству Q, или значение О в противном случае.
Работой устройство для определения координат объекта на изображении управляет блок управления, который явгяется микропрограммируемым блоком управления. Каждому этапу обработки текущего кадра соответствует определенная микрокоманда или ряд микрокоманд, составляющих микропрограмму реализации данного этапа0 Все значения управляющих сигналов, входящих в состав микрокоманды записаны в блок 58 25 репрограммируемой- памяти. Это позволяет на предлагаемой структуре устройства путем замены одной группы микрокоманд другой группой, а также путем добавления новых микрокоманд выполнять этапы обработки текущего кадра с помощью различных алгоритмов и вводить новые этапы вычислений в процесс обработки текущего кадра Адрес микрокоманды генерируется формирователем 57 адреса микрокоманды. При подаче соответствующего адреса на адресный вход блока 58 препрограммируемой памяти происходит считывание выбранных значений управляющих сигналов, которые затем переписываются сигналом A3 в регистр 59 микрокоманды.
Микрокоманда„ формируемая блоком управления, имеет следующий формат. Сигналы У1-У12 составляют поле микрокоманды, отведенное для управления генерацией адреса следующей микрокоманды, сигналы У13-У20 составляют второе поле микрокоманды, используемое в качестве поля данных, которые требуеются в процессе обработки информации, сигналы У21-У98 составляют третье поле микрокоманды и управляют операционной частью устройства.
Синхронизация работы блока управления, управляющего выполнением этапов обработки очередного кадра с процессом записи входного А5, обеспечивается путем фиксации моменс вторым управляющим входом &АМ 57, Определение момента окончания кадрового синхроимпульса АД выполняет микропрограмма фиксации момента начала записи нового кадра, состоящая из двух микрокоманд,, Под управлением первой микрокоманды осуществляется фиксирование единичного уровня сигнала А4„ Если сигнал А4 имеет единичный уровень, то микрокоманда выполняется в течение одного периода тактового сигнала А 3, если нет, то микрокоманда будет повторяться до тех пор, пока сигнал А4 не примет единичного значения, после этого управление передается второй микрокоманде, идентичной по инструкции (У1-У4) первой микрокоманде, но фиксирующей нулевой уровень сигнала А4, После выполнения второй микрокоманды, что определяет конец кадрового синхроимпульса А4 и начало записи очередного нового текущего кадра, управление устройством в соответствии с инструкцией, хранящейся в поле ЈУ1-У4) второй микрокоманды, передается первой микрокоманде микропрограммы, осуществляющей выполнение первого этапа.
Блок адресации предназначен для Формирования адресов элементов текущего, эталонного, сглаженного изображений, а также для формирования адресов значений пороговых функций, хранящихся в блоке 7 и для формирования .с адресов значений весовых коэффициентов, хранящихся в блоке 6. Формирование адресов элементов эталонного, сглаженного изображений и адресов значений весовой и пороговой функций осуществляется с помощью А 16, НПП 18, мультиплексора 19, БОП 20, фор- мироватепя 21 и 25.
Формирование адресов элементов обрабатываемого текущего кадра осуществляется с помощью ФА 17, сумматоров 22, 23 и внутреннего регистра RGO приемопередатчика 7„
Блок 1 памяти сигнала сглаженного изображения предназначен для хране35
40
50
55
та окончания очередного кадрового синхроимпульса А4 Формирователем 57 адреса микрокоманд Таким моментом является переход значения сигнала А4 из единичного в нулевое,, Дня этого инвертированный сигнал А4 и сам сигнал А4 подаются соответственно на первый и второй входы мультиплексора 50
5
0
0
кода условия, выход которого соединен
5
с вторым управляющим входом &АМ 57, Определение момента окончания кадрового синхроимпульса АД выполняет микропрограмма фиксации момента начала записи нового кадра, состоящая из двух микрокоманд,, Под управлением первой микрокоманды осуществляется фиксирование единичного уровня сигнала А4„ Если сигнал А4 имеет единичный уровень, то микрокоманда выполняется в течение одного периода тактового сигнала А 3, если нет, то микрокоманда будет повторяться до тех пор, пока сигнал А4 не примет единичного значения, после этого управление передается второй микрокоманде, идентичной по инструкции (У1-У4) первой микрокоманде, но фиксирующей нулевой уровень сигнала А4, После выполнения второй микрокоманды, что определяет конец кадрового синхроимпульса А4 и начало записи очередного нового текущего кадра, управление устройством в соответствии с инструкцией, хранящейся в поле ЈУ1-У4) второй микрокоманды, передается первой микрокоманде микропрограммы, осуществляющей выполнение первого этапа.
Блок адресации предназначен для Формирования адресов элементов текущего, эталонного, сглаженного изображений, а также для формирования адресов значений пороговых функций, хранящихся в блоке 7 и для формирования .с адресов значений весовых коэффициентов, хранящихся в блоке 6. Формирование адресов элементов эталонного, сглаженного изображений и адресов значений весовой и пороговой функций осуществляется с помощью А 16, НПП 18, мультиплексора 19, БОП 20, фор- мироватепя 21 и 25.
Формирование адресов элементов обрабатываемого текущего кадра осуществляется с помощью ФА 17, сумматоров 22, 23 и внутреннего регистра RGO приемопередатчика 7„
Блок 1 памяти сигнала сглаженного изображения предназначен для хране5
0
0
5
,j + ,jJ
для всех возможных комбинаций , ,j. Значение модуля величины (3), считываемое из БПП 39, записывается в регистр 42 и одновременно поступает на вход формирователя 43.
Блок 11 коммутации сигналов предназначен для коммутации первого входа умножителя 12, входа-выхода блока 6, шин данных КК, DD между собой и для хранения информации во внутренних регистрах.
Умножитель 12 предназначен для умножения двух 8-разрядных величин, одна из которых поступает с канала В блоки 11 или с выхода блока 6 на пер
нпя сглаженного изображения объекта, блок памяти сигнала эталонного изображения предназначен для хранения цифрового сигнала эталонного изображения, блок памяти пороговых функций предназначен для хранения значений пороговых функций, блок памяти весовой функции предназначен для хранения весовых коэффициентов.
Блок 8 коммутации сигналов предназначен для коммутации информационных входов-выходов блока 2, входа блока 10, шин КК, ММ между собой.
Блок 9 коммутации сигналов предназначен для коммутации входов-выходов блоков 3 и 4 с информационным входом устройства и шиной данных КК.
Блок 10 вычисления разности сигналов текущего и эталонного изображений предназначен для вычисления модуля разности величин , j+|U J и поступающих с шины данных КК и с канала С блока 8„ В БПП 39. блока 10 записаны значения модуля вы- ражения
(3)
вый вход умножителя, вторая поступает объекта0 Предлагаемое устройство об- с шины данных ММ на третий вход умно- ладает также большей помехоустойчивостью по отношению к случайным сбоям, которые могут произойти при форжителя.
Блок 14 вычисления сигналов координат объекта предназначен для обработки 16-разрядных величин,, поступающих на первый вход микропроцессора 46 с шины данных DD§
Блок 15 координатных регистров предназначен для записи и хранения координат объекта. Входы регистров 52 и 53 подключены к разрядам шины DD. Выходы регистров являются информационным выходом устройства для определемировании нового эталонного изображе- 50 нияа Структурная схема предлагаемого устройства позволяет осуществлять раз личные коммутации входов-выходов блоков устройства путем изменения программы работы устройства, записанной ,г в БРП микрокоманд блока управления. Это дает возможность реализовывать различные алгоритмы обработки изображений без изменения структуры устройства, благодаря чему предлагаемое
0
5
5
0
0
5
0
ния координат объекта на изображении.
Устройство позволяет повысить точность определения координат объекта, так как в качестве эталонного изображения при его смене используется не 1 текущее изображение объекта, а сглаженное изображение, на котором сигнал от объекта отфильтрован от искажающих его аддитивных шумов., Использование весовой функции эталонного изображения позволяет повысить точность определения координат объек- т а на сложном фоне, так как при вычислении разностной корреляционной функции не будут использоваться элементы эталонного изображения, не относящиеся к искомому объекту. В устройстве в качестве эталона выбирается сглаженное изображение объекта, в формировании которого участвует большое число кадров0 В этом случае значения ошибок дискретизации изображения объекта в текущем и сглаженном изображениях можно считать независимыми, если за период сглаживания объект перемещается на расстояние в несколько дискрет„ Поэтому при таком периодическом обновлении эталона не будет накопления ошибки оценки координат объекта о Для случая медленного перемещения объекта в устройстве используется алгоритм обновления эталона, основанный на сравнении разностной функции с порогом, который также не вызывает быстрого накопления ошибок в оценке координат объекта„ В устройстве производится анализ перемещения объекта за период в L кадров и в зависимости от его величины выбирается тот или иной алгоритм обновления эталона. Это позволяет повысить точность определения координат
мировании нового эталонного изображе- нияа Структурная схема предлагаемого устройства позволяет осуществлять различные коммутации входов-выходов блоков устройства путем изменения программы работы устройства, записанной в БРП микрокоманд блока управления. Это дает возможность реализовывать различные алгоритмы обработки изображений без изменения структуры устройства, благодаря чему предлагаемое
15
устройство обладает более широкими функциональными возможностями по срав нению с известным.
10
15
л о р м у п а изобретения Устройство определения координат объекта, содержащее первый и второй блоки памяти сигналов текущего изображения, блок памяти сигнала эталонного изображения и блок управления, первый выход которого соединен с первым входом блока памяти сигнала эта- лойного изображения, отличающееся тем, что с целью повышения точности определения координат объекта, введены блок памяти сигнала сглаженного изображения, блок адресации, блок памяти весовой функции, блок памяти пороговых функций, первый, второй и третий блоки коммутации сигналов, блок вычисления разности сигна- лор текущего и эталонного изображений, умножитель, блок вычисления сигналов координат объекта, блок коорди- 25 натных регистров, причем второй вход- выход блока памяти сигнала эталонного изображения соединен с первым входом-выходом первого блока коммутации сигналов, третий вход блока памяти сигнала эталонного изображения соединен с вторым выходом блока адресации и с вторыми входами блока памяти весовой функции и блока памяти порогоЙ2Ч8П1Ь
первые входы-выходы первого и второго блоков памяти сигнала текущего изображения соединены соответственно с первым и вторым входами-выходами второго блока коммутации сигналов, первый вход-выход блока памяти весовой функции соединен с четвертым выходом третьего блока коммутации сигналов и с пергзым входом умножителя, третий вход блока памяти весовой функции соединен с пятым выходом блока управления, шестой выход которого подключен к первому входу блока памяти пороговых функций, йторой вход-выход первого блока коммутации сигналов соединен с вторым входом блока вычисления разности сигналов текущего и эталонного изображений и с третьими входами-выходами второго и третьего блоков коммутации сигналов, третий вход-выход первого блока коммутации сигналов соединен с первым входом-выходом блока памяти сигнала сглаженного изображения, ,с третьим входом умножителя и с вторым выходом блока вычисления разности сигналов текущего и эталонного изображений, четвертый вход первого блока коммутации сигналов соединен с седьмым выходом блока управления, а чет- вертый выход первого блока коммутации сигналов соединен с первым входом блока вычисления разности.сигналов
20
30
вых Лункций, второй вход блока памяти г текущего и эталонного изображений,
сигнала сглаженного изображения соединен с вторым выходом блока управления, а третий вход подключен к второму выходу блока адресации, третий выход
третий вход которого соединен с вос мым выходом блока управления, девят выход которого подключен к шестому входу второго блока коммутации сигкоторого соединен с вторым входом налов, десятый выход соединен с четного блока памяти сигнала текущего изображения, четвертый выход подключен к второму входу второго блока памяти сигнала текущего изображения, пятый выход подключен к пятому входу второго блока коммутации сигналов, второй вход соединен с третьим выходом блока управления, а первый вход- выход соединен с первым входом и вто
рый входом-выходом третьего блока ком-50 ка управления, второй вход которого
мутации сигналов, с первым входом блока координатных регистров, с первым входом и с первым выходом бпока вычисления сигналов координат объекта, с четвертым выходом блока управления и с первыми выходами блока вычисления разности сигнапов текущего и эталонного изображений, опока памяти jiopoi fiBHX Лункций и vMHOECHTenH,,
третий вход которого соединен с восьмым выходом блока управления, девятый выход которого подключен к шестому входу второго блока коммутации сигвертым входом третьего блока коммутации сигналов, одиннадцатый выход . соединен с вторым входом умножителя, двенадцатый выход соединен с вторым входом блока координатных регистров, тринадцатый выход соединен с вторым входрм бдока вычисления сигналов координат объекта, второй выход которого подключен к первому входу, бло
является первым управляющим входом устройства, третий вход блока адресации является вторым управляющим входом устройства, четвертый вход второго блока коммутации сигналов является информационным входом устройства, а выход блока координатных регистров является информационным выходом устройствао
уяугмг
2b
Al
}Aff Ј
МВыход
.«I7f т Сканалас Сишныкк
ft д. ft J. 11 i-JKStJL
lll tfePt
L
s/ss-yss
I
«Jl
Hl....f ЕЧрУ
ЛС8
.
1
Л Тяон
int-rrr
ш%
лц
ST
te-t
W
{Д1УЯЮ1
I и
4W
-yjs СУХ
«4f
нашинуйй
30 A,
найаокЗ на&юнЗ на&юк4 Фиг. г
ЧрУ
ЛС8
int-rrr
я-г
-j
«
пгт IT
tf-5
J«f
Pw.J
I
о
-Л
3
NJ О CC
о
Заказ 1068
Тираж 534
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская паб., л. 4/5
Производственно-издательский комбинат Патент, г. У-кгорп t, ул. Гагарина, 101
Подписное1
| Устройство для определения рассогласования в телевизионной следящей системе | 1983 |
|
SU1104692A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
